
Journal of Geo-information Science >
Determining the Distribution of Unmanned Aerial Vehicles Airports for the Emergency Monitoring of Floods in China
Received date: 2018-04-10
Request revised date: 2019-04-18
Online published: 2019-06-15
Supported by
National Natural Science Foundation of China, No.41771388
National Key Research and Development
Program of China, No.2017YFB0503005
Postdoctoral Science Foundation of China, No.2018M640170
Copyright
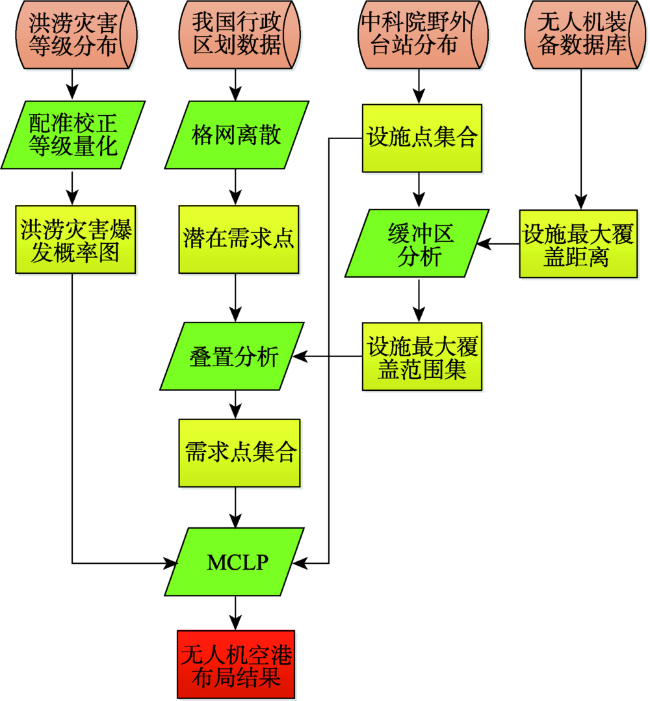
Frequent flood hazards affect large areas and cause great losses, which have posed a serious threat to economic development and people's lives and properties. Unmanned Aerial Vehicles (UAVs) have proven to be useful in monitoring disaster status and providing decision-making support for emergency rescue, because they are able to arrive at floods area timely, obtain flood images and videos quickly, low-risk to operate and flexible to carry out different sensors. The important roles of UAV in emergency rescue have been widely recognized. However, the lack of available UAV resources nearby at the sudden onset of floods seriously limits the capability of UAVs' rapid response to flood disasters. For addressing this challenge, a multi-UAVs remote sensing observation network is highly required, and now has been planned in China to enhance our ability of emergency response. Key problems include where and how to allocate UAVs resources such that the UAVs can reach destination timely when floods occur. To help close this gap, we proposed to build a number of UAV airports in China to establish a remote sensing observation network of UAVs. Field stations of Chinese Academy of Science (CAS) were considered as the potential locations of UAV airports because of their extensive geographical distribution and good cooperation with the UAV application and regulation research center of CAS. With the available flood risk prevention data, administrative division data, CAS field stations data and the UAV database as data sources, we created a fishnet of 0.5° multiply 0.5° to discretize administrative divisions and regarded the central points of these grids as potential demand points, and then calculated the importance of UAV to those demand points based on their flood risk prevention level. Based on this analysis, a Maximum Covering Location Problem (MCLP) model was adopted to determine the optimum stations for UAV airports and a cost-effectiveness curve was used to determine the optimum number of UAV airports. In the end, 81 field stations were selected from 268 field stations, thereby ensuring that UAV airports would be allocated near flood-prone areas and most floods in China could be monitored with UAVs within two hours, which is critical for saving lives and reducing losses. The construction of UAV airport networks will surely contribute to an integrated disaster emergency observation system combining satellite, airplane, UAV and ground observations in China. Additionally, the methods and results in this study can serve as a basis for building a more comprehensive national UAV remote sensing observation network.
LU Ming , LIAO Xiaohan , YUE Huanyin , HUANG Shifeng , XU Chenchen , LU Haiying , BAI Yiqin . Determining the Distribution of Unmanned Aerial Vehicles Airports for the Emergency Monitoring of Floods in China[J]. Journal of Geo-information Science, 2019 , 21(6) : 854 -864 . DOI: 10.12082/dqxxkx.2019.180177
Fig. 1 Flowchart of determining the UAV airport locations for flood observation图1 面向洪涝灾害的无人机空港选址流程 |
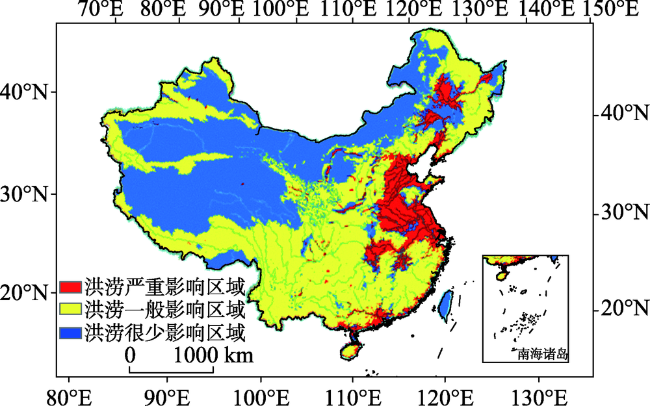
Fig. 2 Map of flood-prevention risk in China图2 中国预防洪涝灾害等级分布 |
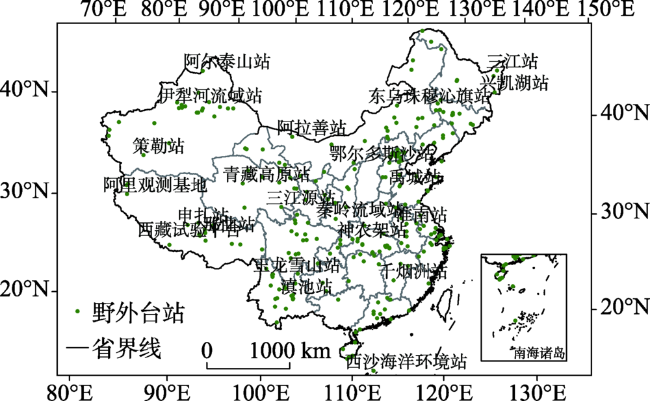
Fig. 3 Distribution map of CAS field stations(2019)图3 中国科学院野外台站分布(2019年) |
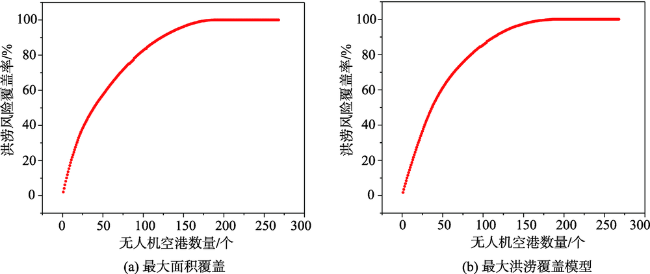
Fig. 4 Cost-effective curves of maximum area covered and maximum flood risk coveredunder 90km service distance of UAV airports图4 无人机空港在90 km最大服务距离条件下最大面积覆盖和最大洪涝覆盖模型的成本-效益曲线 |
Tab. 1 Evaluation of the MCLP solutions: maximum area versus maximum flood risk表1 最大面积和最大洪涝条件下的覆盖能力评价 |
| 覆盖需求点 | 未覆盖需求点 | 洪涝等级覆盖率/% | |
|---|---|---|---|
| 最大面积MCLP | 853 | 564 | 62.5 |
| 最大洪涝MCLP | 743 | 674 | 76.1 |
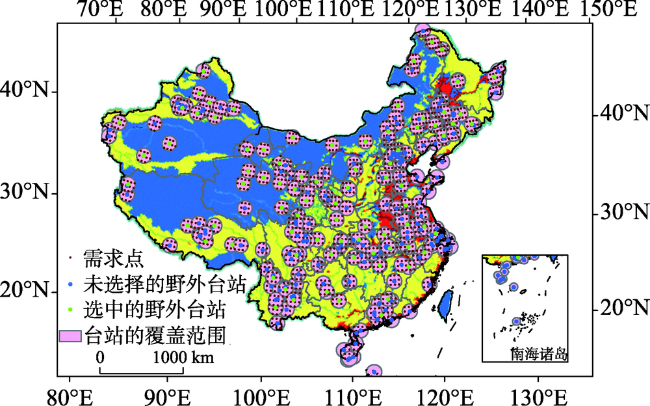
Fig. 5 Selected 81 UAV airports that cover the largest areas图5 最大面积条件下选取的81个空港 |
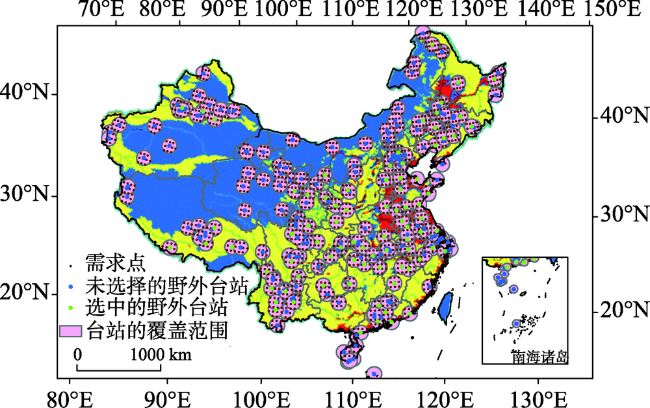
Fig. 6 Selected 81 UAV airports that cover the largest flood risk图6 最大洪涝风险条件下选取的81个空港 |
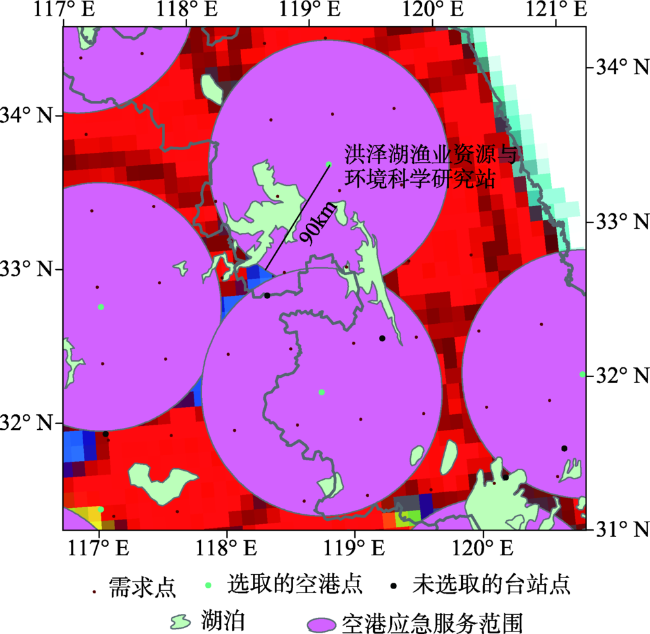
Fig. 7 Droneport and its 90 km emergency service area in the Hongze Lake region图7 洪泽湖流域与无人机空港及其90 km应急观测范围的空间分布 |
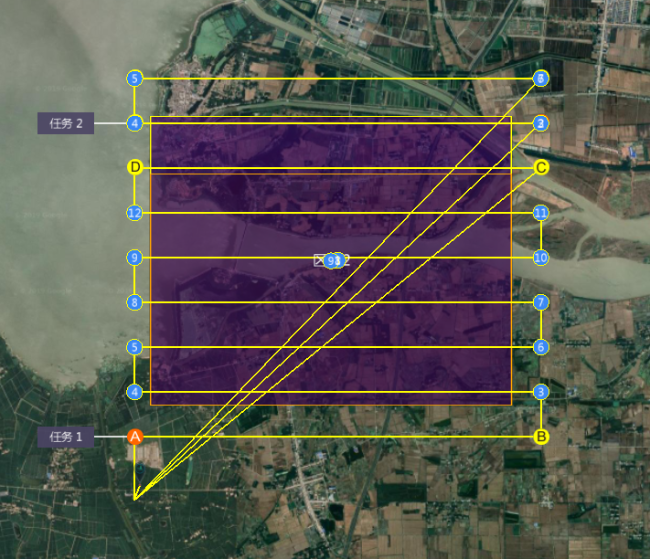
Fig. 8 UAV flight path in the Hongze Lake region图8 洪泽湖口无人机作业区域航拍路径 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
|
| [5] |
|
| [6] |
[
|
| [7] |
|
| [8] |
[
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
[
|
| [13] |
[
|
| [14] |
[
|
| [15] |
[
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
[
|
| [22] |
[
|
| [23] |
[
|
| [24] |
[
|
| [25] |
国家遥感中心.无人机遥感系统信息库[EB/OL]. , 2012.
[ National Remote Sensing Center of China. UAV remote sensing system information database[EB/OL]. , 2012. ]
|
| [26] |
[
|
| [27] |
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}