
Journal of Geo-information Science >
A Fast Mosaic Algorithm of UAV Images based on Dense SIFT Feature Matching
Received date: 2019-01-01
Request revised date: 2019-03-14
Online published: 2019-04-24
Supported by
National Natural Science Foundation of China, No.41604009, 41071280
Nanyang Normal University Youth Project, No.18060
Copyright
The UAV (Unmanned Aerial Vehicle) photography is a new remote sensing system emerging in recent years. It plays an important role in the rapid emergency response of natural disasters. However, due to the large amount of UAV image data, the traditional method for image matching and mosaic is low accuracy and time-consuming. Feature matching is one of key steps in UAV image mosaic. Traditional matching algorithms have several problems, including less feature points, feature maldistribution, and time-consuming. To solve these problems, a fast image mosaic algorithm based on Dense SIFT feature matching is proposed. Firstly, the connection matrix is build based on POS (Position and Orientation System) data to conduct the matching process. The UAV images are then down-sampled. Secondly, image segmentation is performed on the down-sampled images. Then the Dense SIFT operator is used in overlap area of down-sampled images to obtain the initial matching points which are eliminated through matching by the RANSAC (Random Sample Consensus) algorithm and refined by the NCC algorithm on the original and down-sampled images, respectively. Finally, processed images are projected to the object coordinate system based on collinear equation which is calculated by the bundle adjustment method. By contrast, the SIFT (Scale-Invariant Feature Transform) and SURF (Speeded Up Robust Feature) algorithms and the Pix4Dmapper Photogrammetry software are used to test the quality and efficiency of the Dense SIFT algorithm. Two groups of UAV images mosaic experiment results indicate: (1) The Dense SIFT algorithm can be used to obtain about five times more evenly distributed matching points than the SIFT and SURF algorithm at the same time; (2) The Dense SIFT algorithm can be used to effectively improve the quality of the images mosaic by removing the phenomenon of ghosting; (3) It takes about half the time of Pix4D mapper software to complete the same image mosaic test using the Dense SIFT algorithm. This indicates that the presented algorithm has a high image mosaic quality and fast processing speed, which can play an important role in the rapid emergency response of natural disasters.
YANG Jiabin , JIANG Yongtao , YANG Xingbin , GUO Guangmeng . A Fast Mosaic Algorithm of UAV Images based on Dense SIFT Feature Matching[J]. Journal of Geo-information Science, 2019 , 21(4) : 588 -599 . DOI: 10.12082/dqxxkx.2019.190001
Fig. 1 Flow chart of UAV image fast mosaic图1 无人机影像快速拼接流程 |
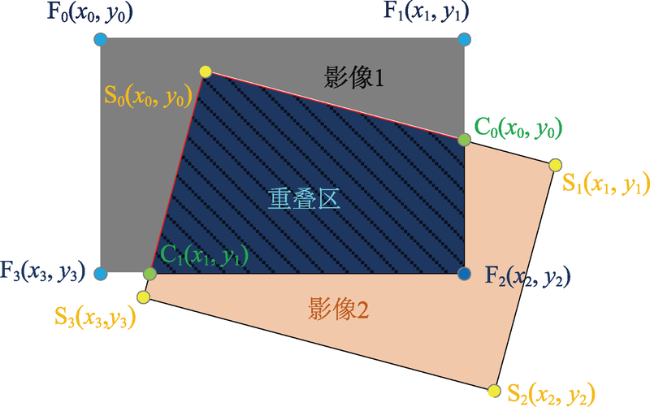
Fig. 2 Estimation of overlap area between of adjacent images图2 影像重叠区域估计 |
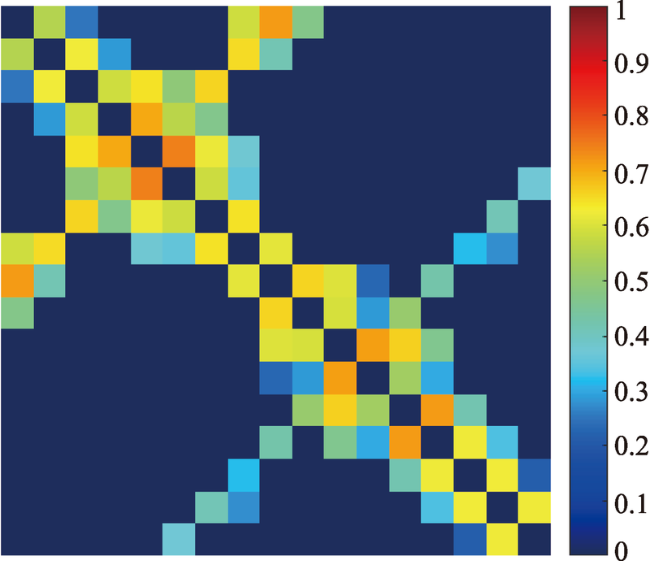
Fig. 3 Connection graph of 17 UAV images图3 17张无人机影像的连接图 |
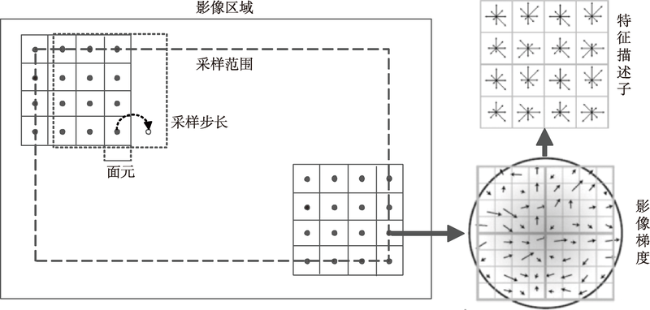
Fig. 4 Feature point extraction process of Dense SIFT algorithm图4 Dense SIFT获取特征点过程 |
Fig. 5 Image segmentation in overlapping area图5 重叠区域影像分块 |
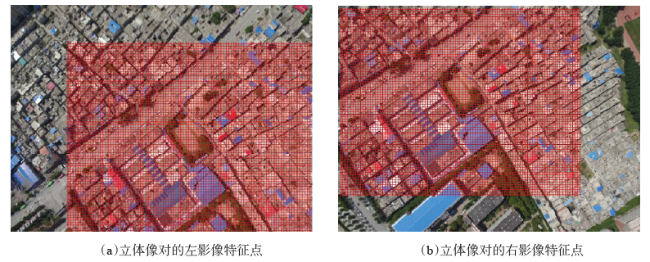
Fig. 6 Feature point extraction results of Dense SIFT algorithm图6 Dense SIFT特征点提取结果 |
Fig. 7 Matching results of Dense SIFT algorithm图7 Dense SIFT匹配结果 |
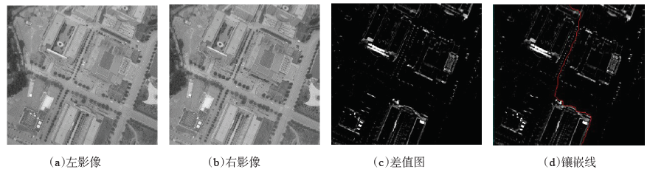
Fig. 8 UAV image difference graph and mosaic line search results图8 无人机影像差值图和镶嵌线搜索结果 |
Tab. 1 Data description of testing areas表1 实验影像数据描述 |
| 影像分辨率/像元 | 焦距/mm | GSD/cm | 影像数 | 相对航高/m | 重叠度/% | ||
|---|---|---|---|---|---|---|---|
| 航向 | 旁向 | ||||||
| 实验区1 | 4896×3672 | 33 | 13.0 | 17 | 449.0 | 75 | 60 |
| 实验区2 | 4896×3672 | 33 | 12.0 | 69 | 423.7 | 75 | 60 |
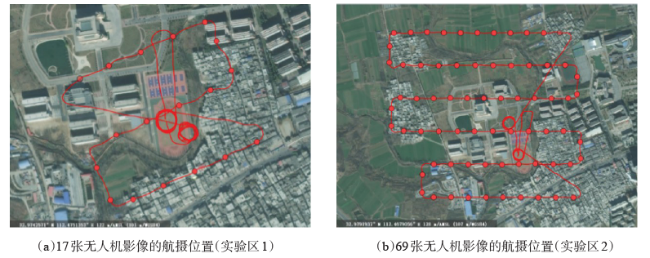
注:图9所示的两组影像数量分别为18张和70张,由于无人机每次执行拍摄任务时,首张影像拍摄可能存在的不稳定现象,因此本文将2组影像的首张影像剔除,试验影像数量分别为:测区1影像17张,测区2影像69张。 |
Fig. 9 Description of experimental area图9 实验区域描述 |
Tab. 2 Statistics of feature matching表2 特征匹配数量统计 |
| 算法类别 | 左影像特征点/个 | 右影像特征点/个 | 初始匹配点数量/个 | RANSAC剔除粗差后数量/个 | 最终匹配点数/个 |
|---|---|---|---|---|---|
| SIFT算法 | 1742 | 1764 | 421 | 390 | 387 |
| SURF算法 | 1749 | 1 825 | 199 | 195 | 195 |
| 本文匹配算法 | 7275 | 7275 | 2774 | 2568 | 2055 |
Tab. 3 Statistics of time consuming of feature matching表3 特征匹配时间统计 |
| 算法类别 | 降采样影像特征提取用时/s | 降采样影像特征匹配用时/s | NCC精化用时/s | 总时间/s |
|---|---|---|---|---|
| SIFT算法 | 0.839 | 0.349 | 0.257 | 1.445 |
| SURF算法 | 0.259 | 0.351 | 0.131 | 0.741 |
| 本文匹配算法 | 0.131 | 0.201 | 1.127 | 1.459 |
Tab. 4 Mean reverse projection errors of match points表4 像点平均反投影误差结果 |
| 加密点数量/个 | /像元 | /像元 | /像元 | |
|---|---|---|---|---|
| 实验区1 | 35 719 | 0.6215 | 0.5773 | 0.8482 |
| 实验区2 | 151 351 | 0.5935 | 0.5517 | 0.8103 |
注:像点在x方向的平均反投影误差,在y方向的平均反投影误差,平面上的平均反投影误差,式中为原始匹配的像点坐标,为平差后物方点反投影到原始影像的像点坐标,为加密点数量。 |
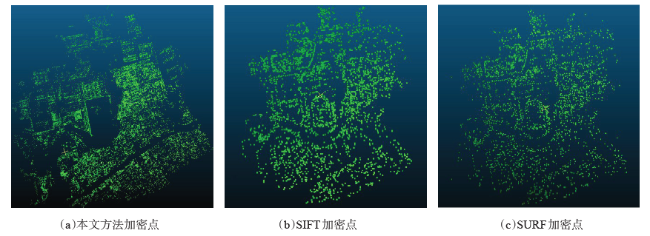
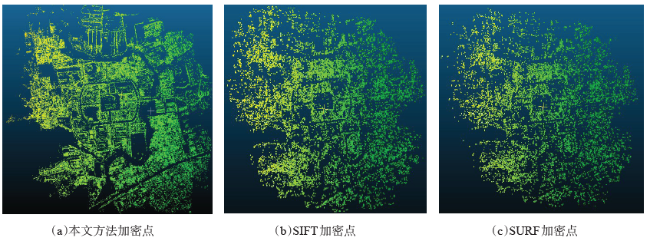
Fig. 10 The distribution of 3D points in 17 images after bundle adjustment图10 光束法平差后的17张影像加密点分布 |
Fig. 11 The distribution of 3D points in 69 images after bundle adjustment图11 光束法平差后的69张影像加密点分布 |
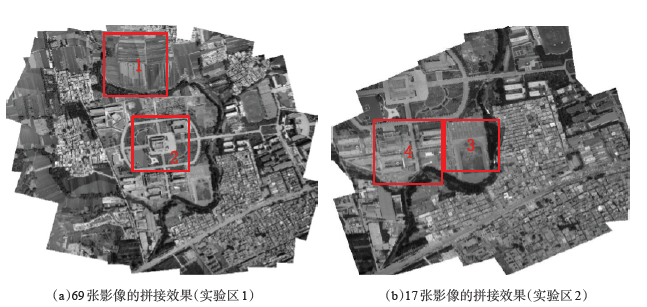
Fig. 12 UAV image mosaic results of global area图12 无人机影像整体拼接结果 |
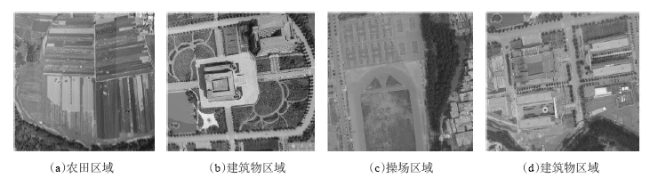
Fig. 13 Mosaic results in local area using our method图13 本文方法局部拼接结果 |
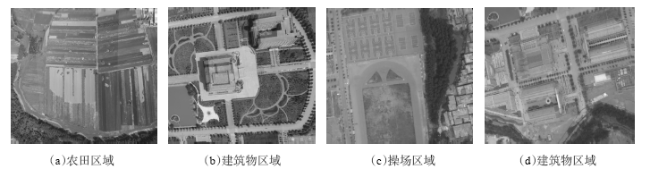
Fig. 14 Mosaic results in local area using SIFT图14 SIFT局部拼接结果 |
Fig. 15 Mosaic results in local area using SURF图15 SURF局部拼接结果 |
Tab. 5 Statistic of processing time using our method表5 本文算法拼接时间对比 |
| 影像数量 | 影像匹配总次数/次 | 影像匹配用时/s | 光束法平差用时/s | 影像纠正用时/s | 影像拼接总用时/s | |
|---|---|---|---|---|---|---|
| 实验区1 | 17 | 92 | 103.356 | 13.900 | 402.100 | 522.758 |
| 实验区2 | 69 | 376 | 421.861 | 20.100 | 1521.200 | 2152.360 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
|
| [3] |
[
|
| [4] |
|
| [5] |
[
|
| [6] |
|
| [7] |
[
|
| [8] |
|
| [9] |
[
|
| [10] |
[
|
| [11] |
|
| [12] |
[
|
| [13] |
|
| [14] |
[
|
| [15] |
[
|
| [16] |
|
| [17] |
|
| [18] |
[
|
| [19] |
[
|
| [20] |
|
| [21] |
[
|
| [22] |
|
| [23] |
[
|
| [24] |
[
|
| [25] |
[
|
| [26] |
[
|
| [27] |
[
|
| [28] |
[
|
| [29] |
[
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}