
Journal of Geo-information Science >
Object-Based Karst Wetland Vegetation Classification Method Using Unmanned Aerial Vehicle images and Random Forest Algorithm
Received date: 2018-12-05
Request revised date: 2019-03-20
Online published: 2019-08-25
Supported by
National Natural Science Foundation of China, No.41801071(41801071)
Guangxi Natural Science Foundation of China, No.2018GXNSFBA281015(2018GXNSFBA281015)
Guilin University of Technology research Foundation of China, No.GUTQDJJ2017096(GUTQDJJ2017096)
Guangxi Bagui Scholars" Foundation Support"()
Copyright
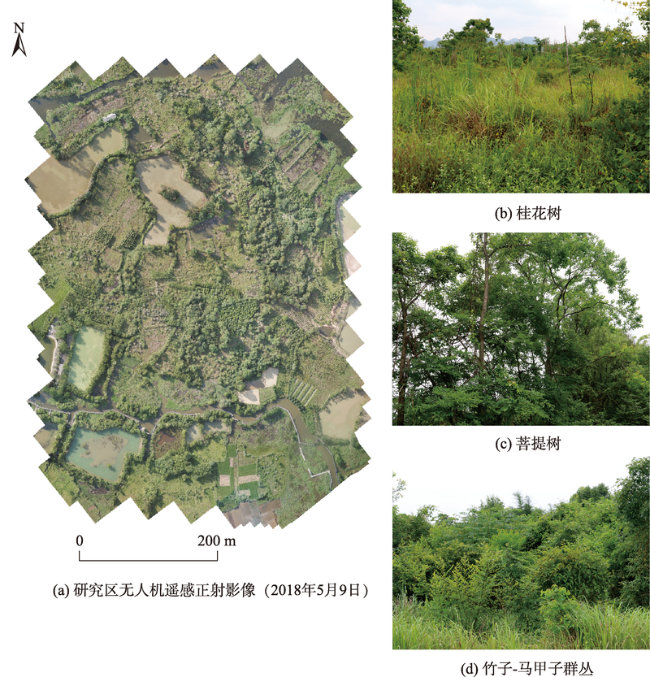
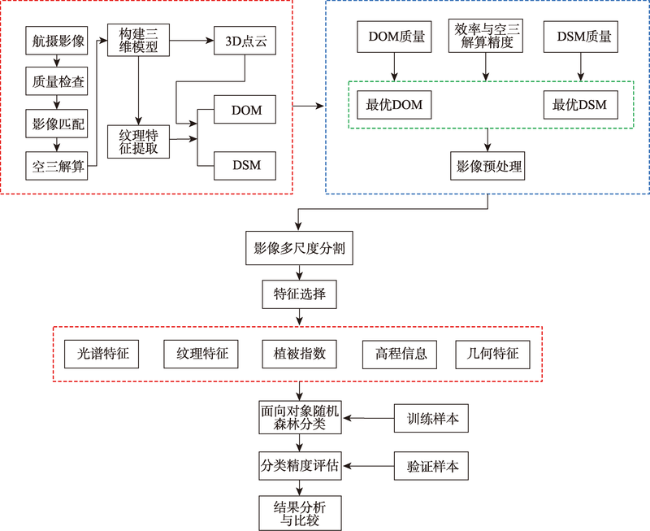
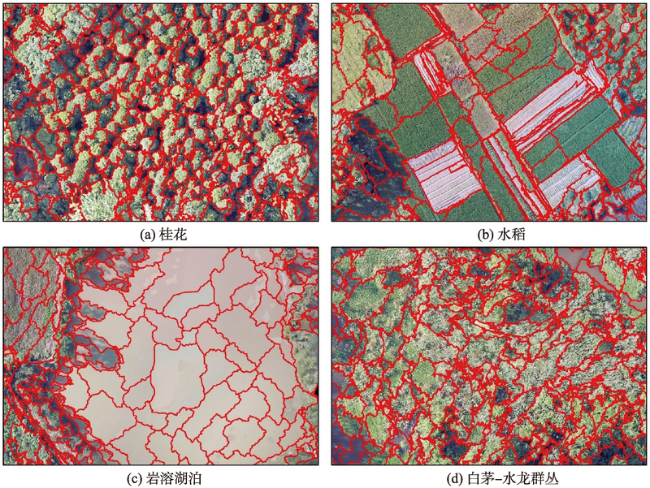
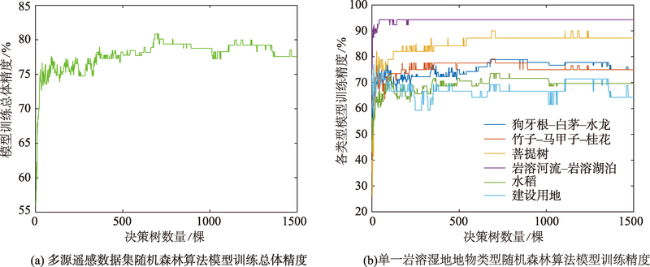
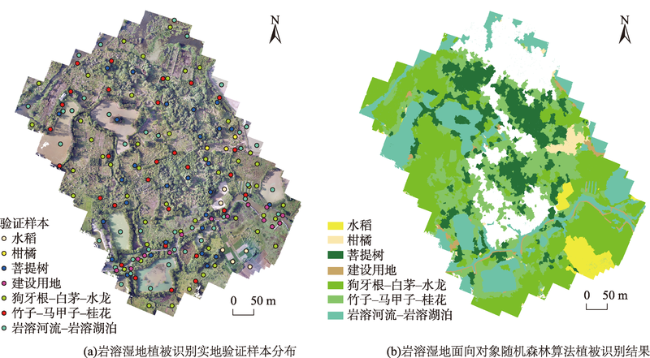
Wetlands are among the most important ecosystems on Earth. They play a key role in alleviating floods and filtering polluted water, and also provide habitats for many plants and animals. A unique wetland type, karst wetland, is widely distributed in southwest China, as influenced by the special soil and water structure of karst landforms. Currently, domestic and foreign scholars pay much less attention to karst wetland than other wetland types, and lack targeted research on high-precision vegetation identification of karst wetland using remote sensing technology. However, like other wetland types, karst wetland has seriously degraded, and many problems need to be solved urgently. Huixian National Wetland Park, located in Guilin, Guangxi province, is a typical karst wetland. In this paper, part of the core area of the Huixian National Wetland Park was selected as the study area, which is greatly affected by human activities and severely degraded. The aerial photography images from an unmanned aerial vehicle (UAV) were used as the data source, and the object-based random forest algorithm was used to realize the high-precision classification of karst wetland vegetation. In so doing, we explored the applicability of UAV RGB remote sensing image and object-based random forest algorithm in karst wetland vegetation recognition, and provided a technical reference for the research and protection of karst wetland by using UAV remote sensing technology. First, the multiscale iterative segmentation algorithm was used to segment the image layers in eCognition Developer 9.0. Then, the texture features calculated based on the grey level co-occurrence matrix (GLCM) and spectral features of the images, the vegetation indexes, geometric features, and the elevation information (DSM) derived from the UAV remote sensing data were fully considered in the feature selection. Finally, the tuning of random forest algorithm parameters, model construction, and classification were implemented in RStudio. Results showed that the object-based random forest algorithm had a high recognition ability for the Huixian wetland vegetation. The overall accuracy was 86.75% and the Kappa coefficient was 0.83 in the 95% confidence interval. In the identification accuracy of vegetation in a single typical karst wetland, the user accuracy of the vegetation cluster of Bermudagrass-Cogongrass-Ludwigia was above 90%, the producer accuracy was over 80%. And the producer accuracy of the Bamboo-Thorny Wingnic-Sweet Olive was higher than 80%, but its user accuracy was only 70.59%.
GENG Renfang , FU Bolin , CAI Jiangtao , CHEN Xiaoyu , LAN Feiwu , YU Hangming , LI Qingxun . Object-Based Karst Wetland Vegetation Classification Method Using Unmanned Aerial Vehicle images and Random Forest Algorithm[J]. Journal of Geo-information Science, 2019 , 21(8) : 1295 -1306 . DOI: 10.12082/dqxxkx.2019.180631
表1 研究区训练和验证样本数据 |
| 类型 | 岩溶河流-岩溶湖泊 | 狗牙根-白茅-水龙 | 水稻 | 竹子-马甲子-桂花 | 菩提树 | 柑橘 | 建设用地 | 总计 |
|---|---|---|---|---|---|---|---|---|
| 训练样本 | 26 | 36 | 34 | 23 | 20 | 7 | 14 | 160 |
| 验证样本 | 39 | 47 | 6 | 29 | 28 | 3 | 14 | 166 |
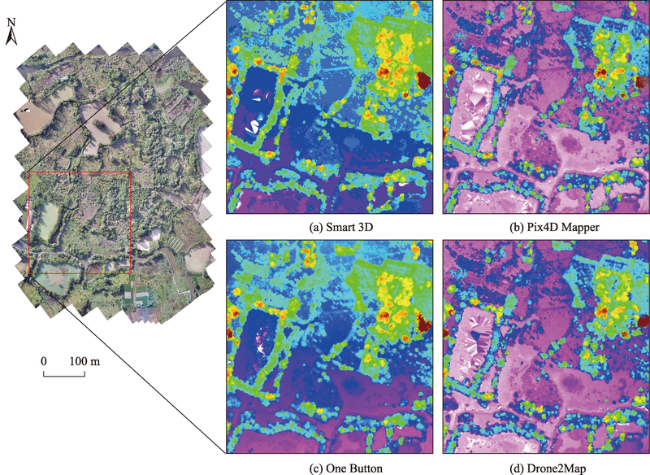
表2 四款无人机影像处理软件的影像处理统计结果对比Tab. 2 Comparison of image processing statistical results of four kinds of UAV image processing software (Smart 3D、Pix4D Mapper、Drone2Map、One Button) |
| 处理时间 | 空三误差/像元 | |
|---|---|---|
| Smart 3D | 5h:10m:8s | 0.72 |
| Pix4D Mapper | 1h:20m:57s | 0.43 |
| Drone2Map | 1h:31m:9s | 0.24 |
| One Button | 3h:56m:58s | - |
表3 影像分割参数优化训练初始值设定Tab. 3 Initial parameter setting of image segmentation during optimization training |
| 参数 | 精细尺度 | 中等尺度 | 大尺度 |
|---|---|---|---|
| 初始值 | 13 | 26 | 37 |
| 步长 | 10 | 30 | 50 |
| 迭代次数 | 100 | 100 | 100 |
| Shape | 0.7 | 0.7 | 0.7 |
| Compactness | 0.5 | 0.5 | 0.5 |
表4 岩溶湿地各地物面积统计Tab. 4 Area statistics of the various types of karst wetland |
| 类别 | 面积/hm2 | 比重/% |
|---|---|---|
| 水稻 | 0.91 | 3 |
| 柑橘 | 0.37 | 1 |
| 菩提树 | 3.74 | 13 |
| 建设用地 | 0.31 | 1 |
| 狗牙根-白茅-水龙 | 12.84 | 45 |
| 竹子-马甲子-桂花 | 5.66 | 20 |
| 岩溶河流-岩溶湖泊 | 4.84 | 17 |
表5 岩溶湿地地物总体分类精度Tab. 5 Overall classification accuracy of karst wetland vegetation |
| 检验指标 | 精度评估 | 标准差 | 95%置信区间 | |
|---|---|---|---|---|
| 总体精度/% | 86.75 | 2.47 | 81.91 | 91.59 |
| Kappa系数 | 0.83 | 0.03 | 0.77 | 0.90 |
表6 岩溶湿地各地物类型的分类精度Tab. 6 Classification accuracy of the various types of karst wetland (%) |
| 类别 | 用户精度 | 生产者精度 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 精度评估 | 标准差 | 95% 置信区间 | 精度评估 | 标准差 | 95% 置信区间 | ||||
| 狗牙根-白茅-水龙 | 92.86 | 2.00 | 88.94 | 96.77 | 82.98 | 3.16 | 76.78 | 89.18 | |
| 柑橘 | 100.00 | 0.00 | 100.00 | 100.00 | 100.00 | 0.00 | 100.00 | 100.00 | |
| 竹子-马甲子-桂花 | 70.59 | 3.54 | 63.66 | 77.52 | 82.76 | 6.22 | 70.57 | 94.95 | |
| 菩提树 | 79.31 | 3.14 | 73.15 | 85.47 | 82.14 | 7.46 | 67.52 | 96.76 | |
| 岩溶河流-岩溶湖泊 | 94.87 | 1.71 | 91.52 | 98.23 | 94.87 | 4.02 | 87.00 | 102.74 | |
| 水稻 | 100.00 | 0.00 | 100.00 | 100.00 | 100.00 | 0.00 | 100.00 | 100.00 | |
| 建设用地 | 92.31 | 2.07 | 88.25 | 96.36 | 85.71 | 23.17 | 40.30 | 131.13 | |
表7 岩溶湿地地物类型的混淆矩阵Tab. 7 Confusion matrix of different karst wetland vegetation types |
| 类别 | 狗牙根-白茅-水龙 | 柑橘 | 竹子-马甲子-桂花 | 菩提树 | 岩溶河流-岩溶湖泊 | 水稻 | 建设用地 | 总计 |
|---|---|---|---|---|---|---|---|---|
| 狗牙根-白茅-水龙 | 39 | 0 | 1 | 1 | 1 | 0 | 0 | 42 |
| 柑橘 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 3 |
| 竹子-马甲子-桂花 | 5 | 0 | 24 | 4 | 0 | 0 | 1 | 34 |
| 菩提树 | 1 | 0 | 4 | 23 | 1 | 0 | 0 | 29 |
| 岩溶河流-岩溶湖泊 | 1 | 0 | 0 | 0 | 37 | 0 | 1 | 39 |
| 水稻 | 0 | 0 | 0 | 0 | 0 | 6 | 0 | 6 |
| 建设用地 | 1 | 0 | 0 | 0 | 0 | 0 | 12 | 13 |
| 总计 | 47 | 3 | 29 | 28 | 39 | 6 | 14 | 166 |
| [1] |
|
| [2] |
|
| [3] |
方朝阳, 邬浩, 陶长华 , 等. 鄱阳湖南矶湿地景观信息高分辨率遥感提取[J]. 地球信息科学学报, 2018,18(6):847-856.
[
|
| [4] |
马祖陆, 蔡德所, 蒋忠诚 . 岩溶湿地分类系统研究[J]. 广西师范大学学报·自然科学版, 2009,27(2):101-106.
[
|
| [5] |
王鹏, 万荣荣, 杨桂山 . 基于多源遥感数据的湿地植物分类和生物量反演研究进展[J]. 湿地科学, 2017,15(1):114-124.
[
|
| [6] |
付波霖, 李颖, 张柏 , 等. 基于多频率极化SAR影像的洪河国家级自然保护区植被信息提取研究[J]. 湿地科学, 2019,17(2):199-209.
[
|
| [7] |
张磊, 宫兆宁, 王启为 , 等. Sentinel-2影像多特征优选的黄河三角洲湿地信息提取[J]. 遥感学报, 2019,23(2):313-326.
[
|
| [8] |
陈琳琳, 董雪梅, 詹佳琪 , 等. 基于面向对象的GF-1遥感影像采煤沉陷区湿地分类[J]. 农业工程学报, 2018,34(9):240-247.
[
|
| [9] |
|
| [10] |
李德仁, 李明 . 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报·信息科学版, 2014,39(5):505-513.
[
|
| [11] |
|
| [12] |
晏磊, 廖小罕, 周成虎 , 等. 中国无人机遥感技术突破与产业发展综述[J]. 地球信息科学学报, 2019,21(4):476-495.
[
|
| [13] |
宋晓阳, 黄耀欢, 董东林 , 等. 融合数字表面模型的无人机遥感影像城市土地利用分类[J]. 地球信息科学学报, 2018,20(5):703-711.
[
|
| [14] |
井然, 宫兆宁, 赵文吉 , 等. 基于无人机SfM数据的挺水植物生物量反演[J].生态学报,2017,37(22):7698-7709.
[
|
| [15] |
周在明, 杨燕明, 陈本清 . 基于无人机遥感监测滩涂湿地入侵种互花米草植被覆盖度[J]. 应用生态学报, 2016,27(12):3920-3926.
[
|
| [16] |
|
| [17] |
肖武, 任河, 吕雪娇 , 等. 基于无人机遥感的高潜水位采煤沉陷湿地植被分类[J]. 农业机械学报, 2019,50(2):177-186.
[
|
| [18] |
邵亚, 蔡崇法, 赵悦 , 等. 桂林会仙湿地沉积物中磷形态及分布特征[J]. 环境工程学报, 2014,8(12):5311-5317.
[
|
| [19] |
吴应科, 莫源富, 邹胜章 . 桂林会仙岩溶湿地的生态问题及其保护对策[J]. 中国岩溶, 2006,25(1):85-88.
[
|
| [20] |
周晓敏, 赵力彬, 张新利 . 低空无人机影像处理技术及方法探讨[J]. 测绘与空间地理信息, 2012,35(2):182-184.
[
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
詹国旗, 杨国东, 王凤艳 , 等. 基于特征空间优化的随机森林算法在GF-2影像湿地分类中的研究[J]. 地球信息科学学报, 2018,20(10):1520-1528.
[
|
| [25] |
|
| [26] |
|
| [27] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}