
Journal of Geo-information Science >
An Algorithm for Simplifying Linear Elements of Vector Tile Maps
Received date: 2019-05-07
Request revised date: 2019-07-08
Online published: 2019-10-29
Supported by
Defense “973” of China(613317)
Copyright
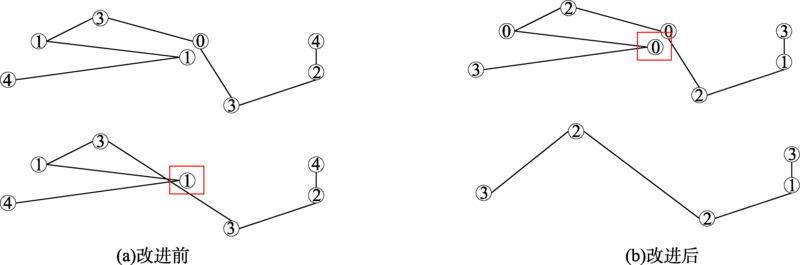
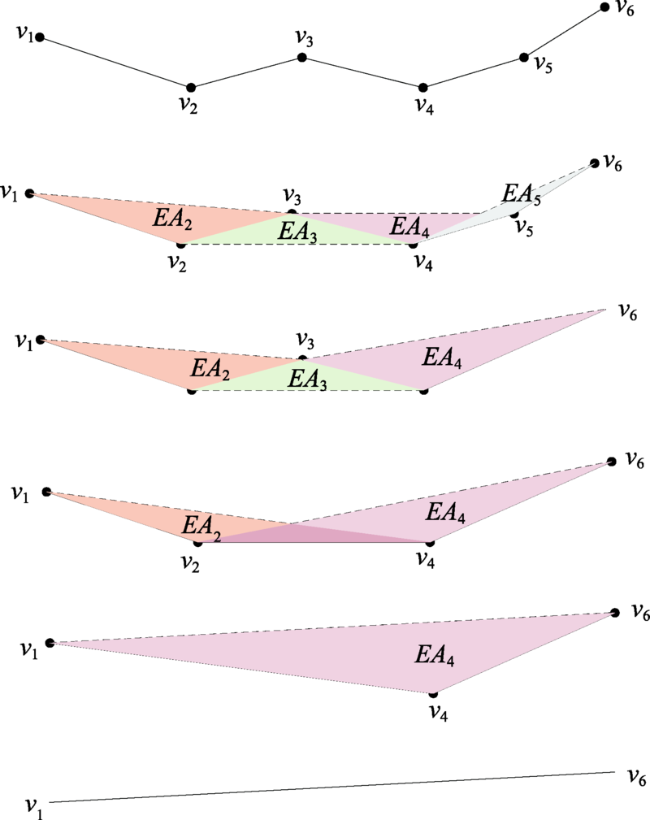
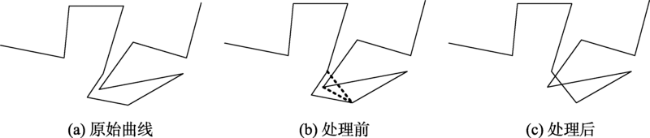
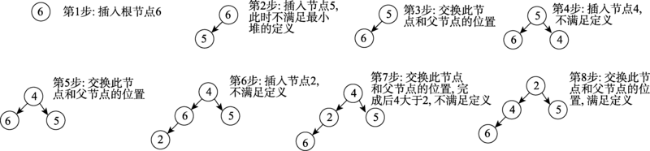
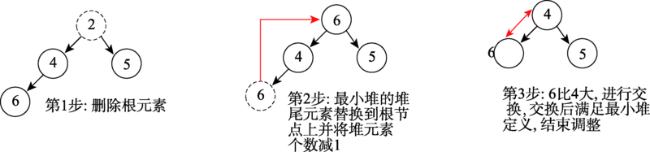
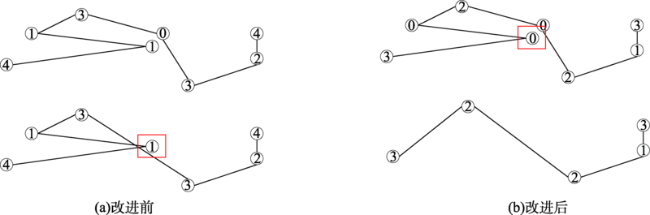
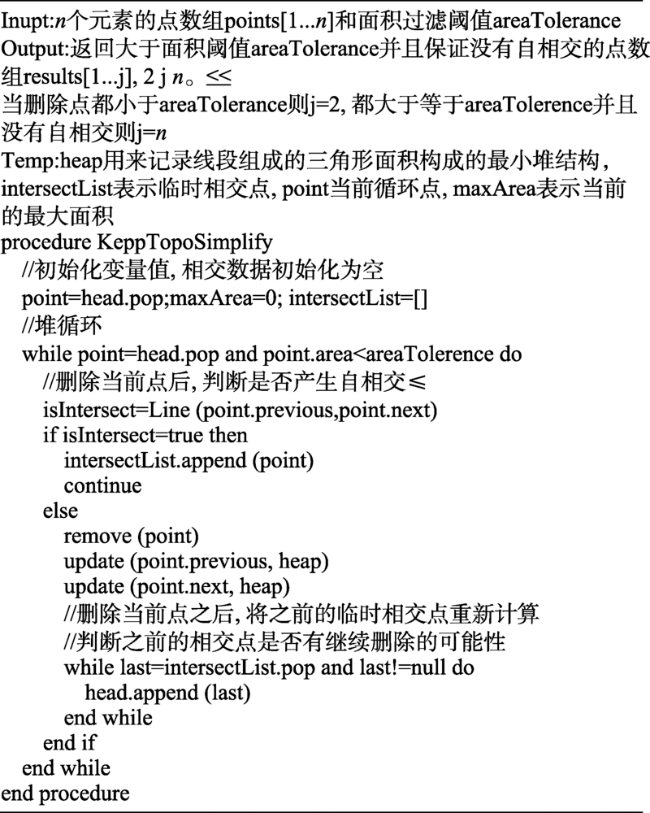
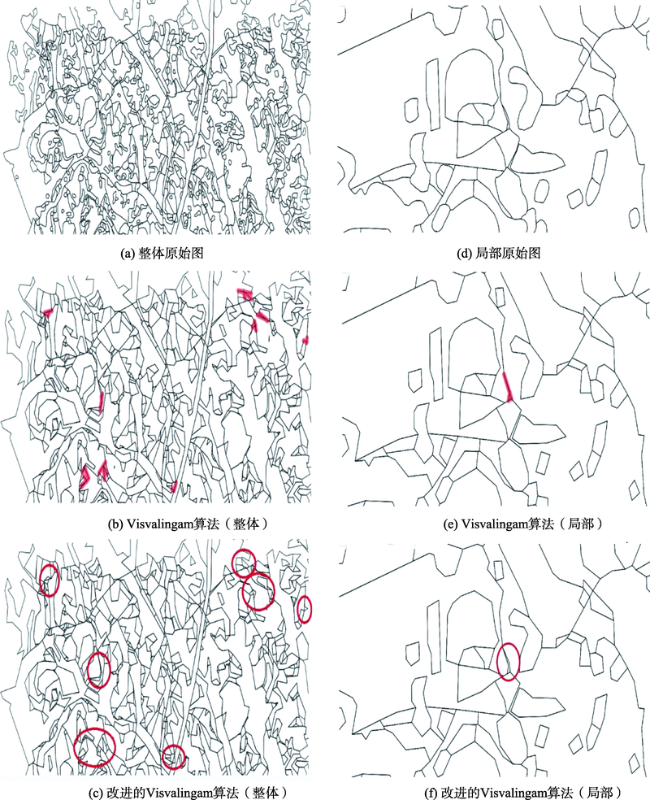
The simplification of linear elements is very important to improve the efficiency of data transmission and visual expression in vector tile map services. Most classical simplification algorithms do not consider the consistency of curves' spatial relations before and after the simplification, which leads to abnormal problems such as sharpening the results of simplification, missing local extremum points, generating line intersection. Considering consistency will affect the efficiency of simplification. In this context, an improved Visvalingam algorithm was proposed according to the application requirements of the vector tile map service.The algorithm applies the minimum heap technology to solve the problem of low efficiency of minimum weight value search, and uses the judgment strategy of self-intersecting topological relation of the line to consider the influence of other points on the current point from the global perspective. In so doing, we can solve the problem of consistency preservation of the topological relationship before and after the simplification of linear elements. The improved Visvalingam algorithm was compared with the original Visvalingam algorithm in terms of topological relationship, geometric features, position accuracy, and simplification efficiency. Results show that the improved Visvalingam algorithm accounted for the topological relations of linear elements and ensuredthe consistency of the overall morphology and topologicalrelationship before and after thesimplification.Our findings suggest that the prosposed Visvalingam algorithm can be applied to the online vector tile map service more efficiently.
JIN Cheng , AN Xiaoya , CUI Haifu , ZHAO Yujun , WANG Hui . An Algorithm for Simplifying Linear Elements of Vector Tile Maps[J]. Journal of Geo-information Science, 2019 , 21(10) : 1502 -1509 . DOI: 10.12082/dqxxkx.2019.190214
表1 2种算法化简河流要素的长度变化比Tab. 1 Comparison of between the two algorithms in terms of river length, at different scales |
| 比例尺 | |||
|---|---|---|---|
| 1:5万 | 1:10万 | 1:25万 | |
| Visvalingam算法 | 0.9978 | 0.9734 | 0.9513 |
| 改进Visvalingam算法 | 0.9986 | 0.9815 | 0.9722 |
表2 2种算法化简河流要素的曲折度变化比Tab. 2 Comparison of between the two algorithms in terms of rivier sinuosity,at different scales |
| 比例尺 | |||
|---|---|---|---|
| 1:5万 | 1:10万 | 1:25万 | |
| Visvalingam算法 | 0.9853 | 0.9703 | 0.9544 |
| 改进Visvalingam算法 | 0.9859 | 0.9795 | 0.9521 |
表3 2种算法化简河流要素的位移标准差与位置误差比较Tab. 3 Comparison of between the two algorithms in terms of river displacement standard deviation and location error at different scales |
| Visvalingam算法 | 改进Visvalingam算法 | ||||
|---|---|---|---|---|---|
| 1:5万 | 1:25万 | 1:5万 | 1:25万 | ||
| 位移标准差/m | 1.89 | 2.01 | 1.63 | 1.92 | |
| 位置误差/m | 1.71 | 7.27 | 1.54 | 6.86 | |
表4 2种算法的化简效率对比Tab. 4 Comparison of between the two algorithms in terms of simplification efficiency, at different scales (s) |
| 比例尺 | |||
|---|---|---|---|
| 1:5万 | 1:10万 | 1:25万 | |
| Visvalingam算法 | 12 | 31 | 98 |
| 改进的Visvalingam算法1 改进的Visvalingam算法2 | 10 28 | 22 45 | 79 110 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
孙路, 陈荦, 刘露 , 等. 一种面向服务器制图可视化的矢量数据多尺度组织方法口[J]. 计算机工程与科学, 2014,36(2):226-232.
[
|
| [5] |
王家耀, 范亦爱, 韩同春 , 等. 普通地图制图综合原理[M]. 北京: 测绘出版社, 1993.
[
|
| [6] |
|
| [7] |
|
| [8] |
[
|
| [9] |
翟仁健, 武芳, 朱丽 , 等. 利用地理特征约束进行曲线化简[J]. 武汉大学学报·信息科学版, 2009,34(9):1021-1024.
[
|
| [10] |
|
| [11] |
李成名, 郭沛沛, 殷勇 , 等. 一种顾及空间关系约束的线化简方法[J]. 测绘学报, 2017,46(4):498-506.
[
|
| [12] |
杜佳威, 武芳, 李靖涵 , 等. 采用多元弯曲组划分的线要素化简方法[J]. 计算机辅助设计与图形学学报, 2017,29(12):2189-2196.
[
|
| [13] |
|
| [14] |
杜世宏, 秦其明, 王桥 . 空间关系及其应用[J]. 地学前缘, 2006,13(3):69-80.
[
|
| [15] |
武芳, 朱鲲鹏 . 线要素化简算法几何精度评估[J]. 武汉大学学报·信息科学版, 2008,33(6):600-603.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}