
Journal of Geo-information Science >
Extraction of Urban Road Network Intersections based on Low-Frequency Taxi Trajectory Data
Received date: 2019-04-24
Request revised date: 2019-09-15
Online published: 2019-12-25
Supported by
National Natural Science Foundation of China(41771474)
National Natural Science Foundation of China(41471374)
Copyright
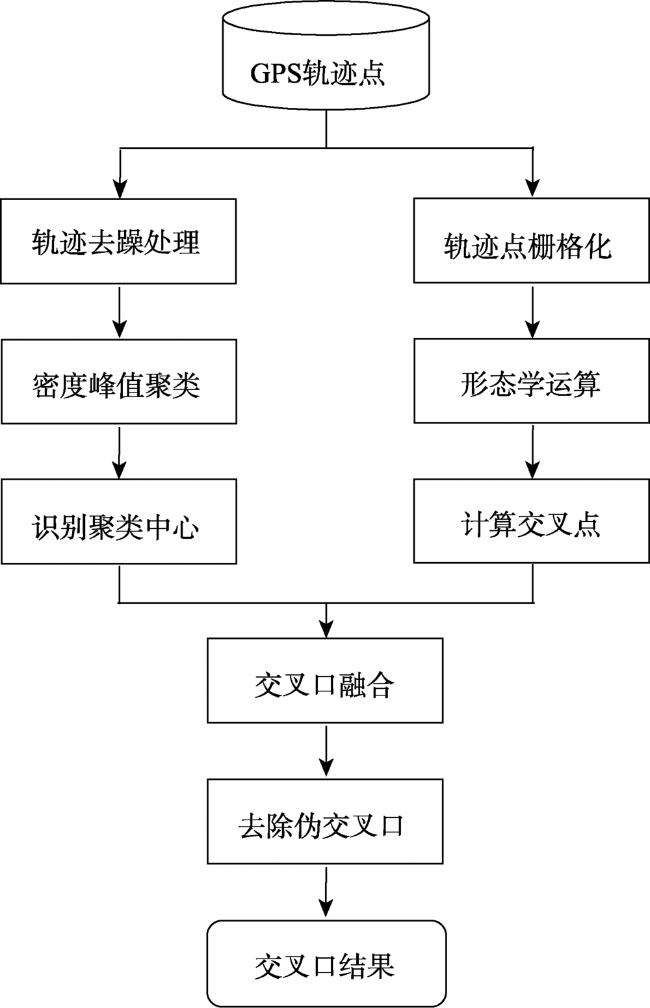
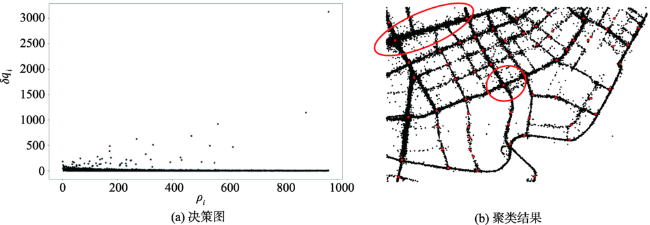
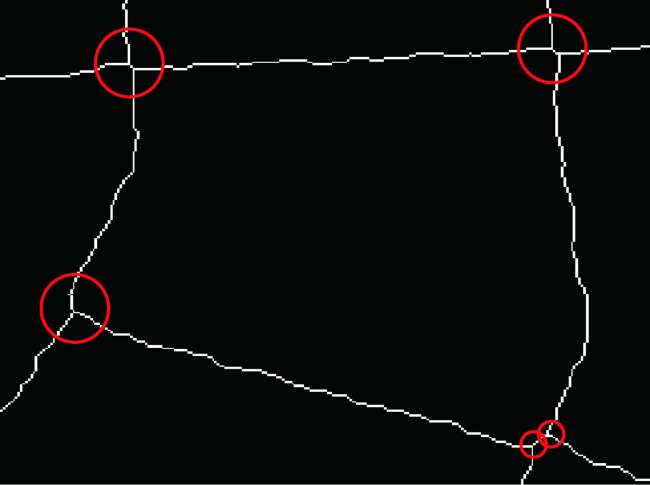
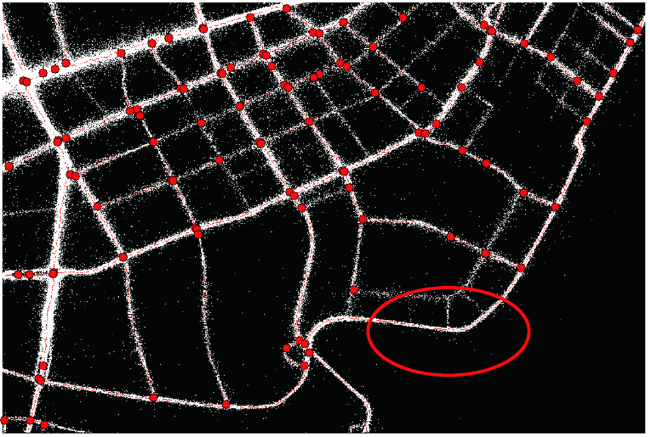
Taxi GPS trajectory data are of low acquisition cost, short cycle, large coverage, large-scale, and real-time. Moreover, taxi trajectory data contain a large amount of driving record information for extracting digital road information. Thus, taxi GPS trajectory data are suitable for obtaining and rapidly updating the information of large-scale urban traffic road networks. The extraction of urban road network intersections based on GPS trajectory data is currently a research hotspot. However, most of existing methods, which are applicable to the high-frequency GPS data, are difficult to adapt to taxi trajectories with low sampling frequency, low positioning accuracy, many noise points, and uneven data distribution. Therefore, existing methods are not readily applied to extract the intersections of suburb areas where taxi trajectory data are sparse or low-frequency. To extract road intersection information as accurately and comprehensively as possible, this paper proposed an integrated methodology to identify the intersections of urban road networks based on dense and sparse trajectory data. In this paper, the density peak clustering method was adopted in the vector space. Meanwhile, the mathematical morphology processing method was adopted in the grid space, where multiple resolution images were generated in the trajectory data rasterization stage. The extraction results were finally fused to achieve the purpose of extracting the road intersections of suburb areas with low traffic (i.e., sparse sampled data). Further, a fusion mechanism was designed to detect these intersections by fusing multiple results in both spaces. Finally, this paper used principal component analysis to determine the authenticity of the intersections, which was used to identify real intersections and remove pseudo intersections that were incorrectly extracted. In so doing, we obtained the urban road intersections based on the low-frequency taxi trajectory. Compared with existing methods, this method extracted more intersections and showed considerable consistency with remote sensing imagery. Besides, the accuracy evaluation shows that the extraction accuracy was 92.23%, the recall rate was 77.26% and the F-value was 84.08%. Our findings suggest that the proposed methodology can ensure the integrity and accuracy of urban road network intersections and be applied in intelligent transportation systems.
LI Siyu , XIANG Longgang , ZHANG Caili , Gong Jianya . Extraction of Urban Road Network Intersections based on Low-Frequency Taxi Trajectory Data[J]. Journal of Geo-information Science, 2019 , 21(12) : 1845 -1854 . DOI: 10.12082/dqxxkx.2019.190187
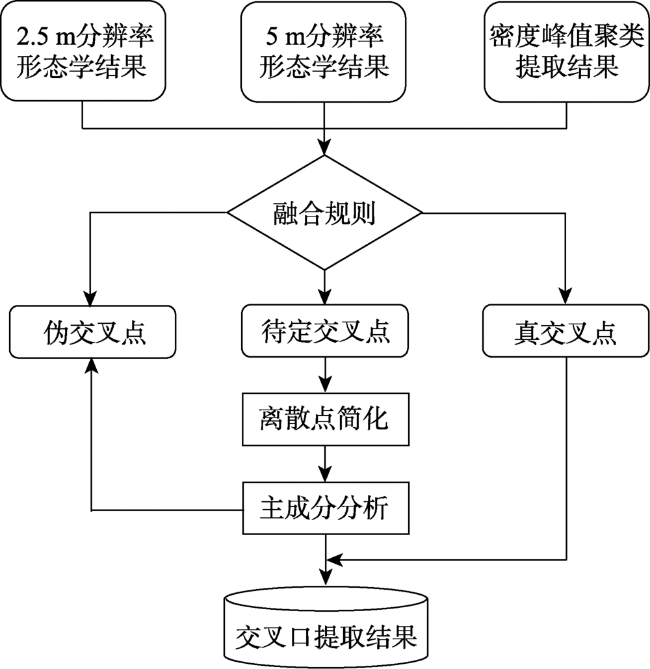
表1 多种提取结果的融合原则Tab. 1 Rule for data fusion of multiple extraction results |
| 2.5 m提取结果 | 5 m提取 结果 | 密度峰值聚类 提取结果 | 判断 结果 |
|---|---|---|---|
| √ | √ | √ | 真 |
| √ | √ | 真 | |
| √ | √ | 真 | |
| √ | √ | 真 | |
| √ | 待定 | ||
| √ | 待定 | ||
| √ | 待定 |
注:表中“√”表示提取出有交叉点,“空白”表示未提取出交叉点。 |
表2 道路交叉口提取结果的精度评价与比较Tab. 2 Accuracy evaluation and comparison of road intersection extraction results (%) |
| 方法 | 准确率 | 召回率 | F-值 |
|---|---|---|---|
| 本文方法 | 92.23 | 77.26 | 84.08 |
| Ahmed方法 | 74.00 | 30.08 | 42.77 |
| Davies方法 | 85.19 | 56.10 | 67.65 |
| [1] |
|
| [2] |
傅罡 . 多源遥感数据的道路提取方法研究[D]. 北京:清华大学, 2014.
[
|
| [3] |
|
| [4] |
郭风成, 李参海, 李宗春 , 等. 高分辨率SAR影像道路交叉口自动提取方法[J]. 测绘科学技术学报, 2017,34(2):199-203.
[
|
| [5] |
|
| [6] |
李润生, 司毅博, 马德宝 , 等. 基于语义规则的高分辨率影像道路交叉口提取方法[J]. 测绘科学技术学报, 2017,34(2):168-174.
[
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
胡瀚, 向隆刚, 王德浩 . 出租车轨迹数据的道路提取[J]. 测绘通报, 2018(7):53-57.
[
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
唐炉亮, 牛乐, 杨雪 , 等. 利用轨迹大数据进行城市道路交叉口识别及结构提取[J]. 测绘学报, 2017,46(6):770-779.
[
|
| [17] |
谭祥爽, 王静, 宋现锋 , 等. 基于浮动车数据的路口探测方法[J]. 地理与地理信息科学, 2015,31(5):34-38,127.
[
|
| [18] |
王德浩 . 基于低频出租车GPS轨迹数据的路网信息提取[D]. 武汉:武汉大学, 2017.
[
|
| [19] |
荣秋生, 颜君彪, 郭国强 . 基于DBSCAN聚类算法的研究与实现[J]. 计算机应用, 2004(4):45-46,61.
[
|
| [20] |
冯少荣, 肖文俊 . DBSCAN聚类算法的研究与改进[J]. 中国矿业大学学报, 2008,37(1):105-111.
[
|
| [21] |
|
| [22] |
唐炉亮, 郑文斌, 王志强 , 等. 城市出租车上下客的GPS轨迹时空分布探测方法[J]. 地球信息科学学报, 2015,17(10):1179-1186.
[
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}