
Journal of Geo-information Science >
A New Localization Method based on Fuzzy Analysis of Observation Information
Received date: 2019-05-31
Request revised date: 2019-10-18
Online published: 2019-12-25
Supported by
National Natural Science Foundation of China(41861047)
National Natural Science Foundation of China(41461078)
Northwest Normal University Young teachers' Scientific Research Capability Upgrading Program(NWNU-LKQN-1706)
Copyright
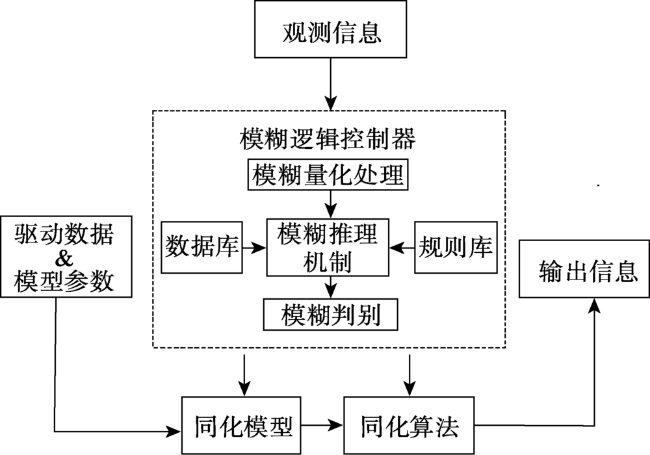
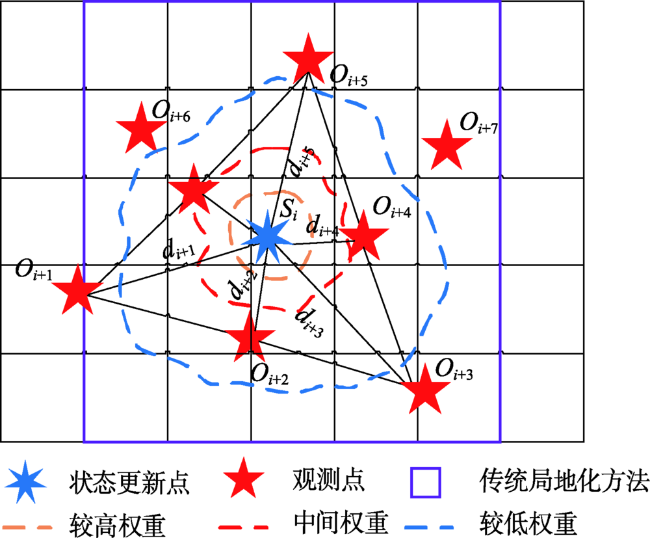
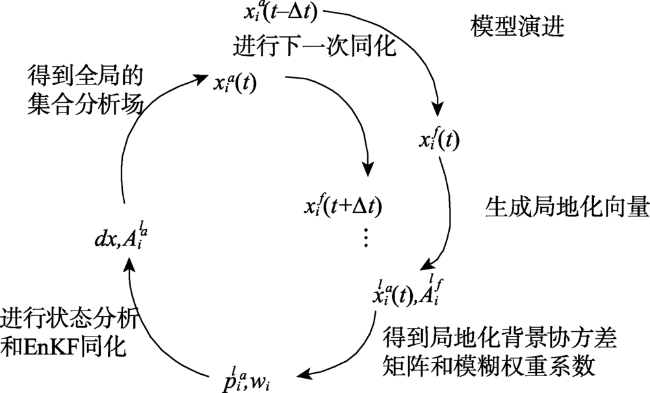
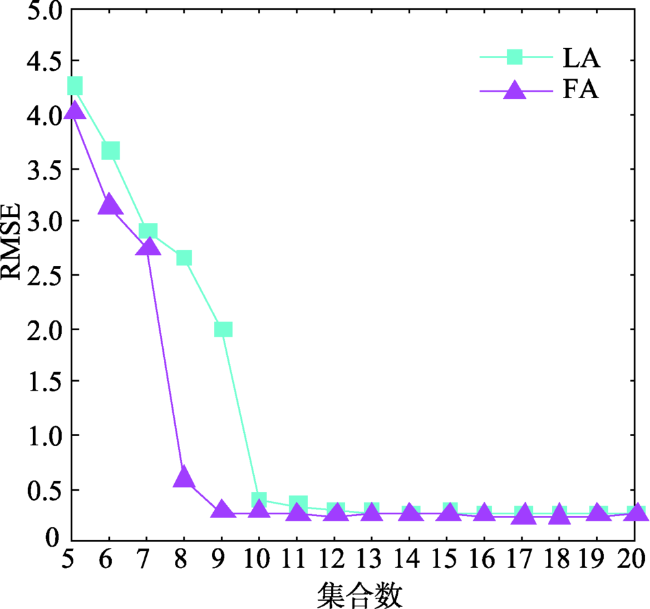
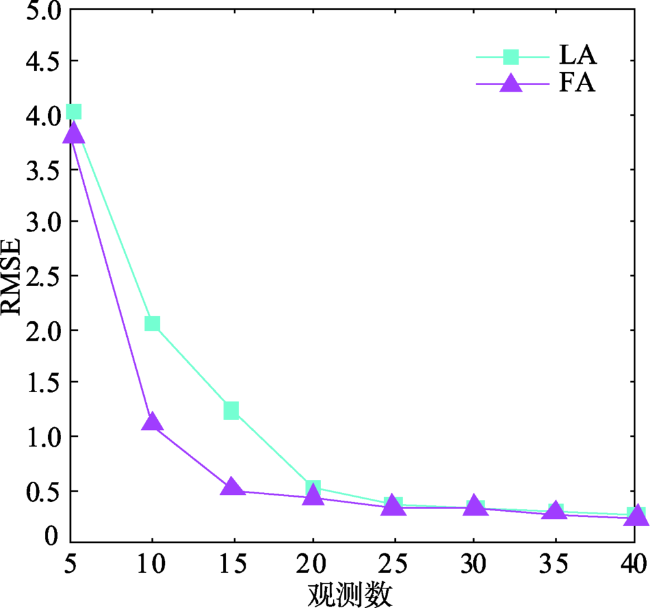
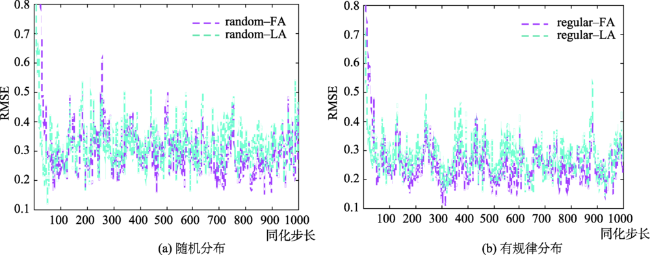
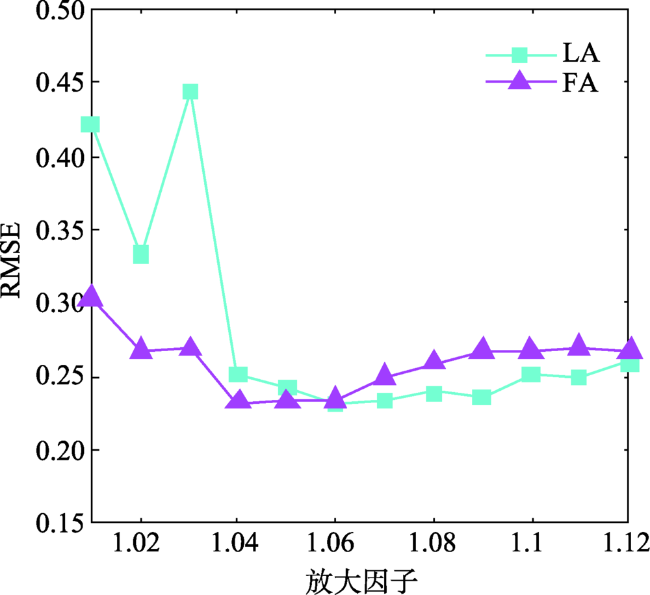
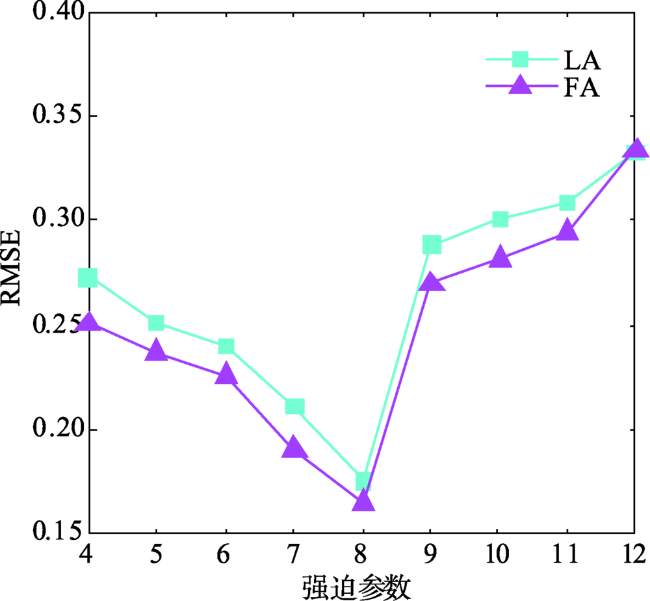
In numerical simulations of the earth system, ensemble data assimilation methods are commonly used to study the various observation errors in predicting geological variables. In this regard, the widely used Ensemble Kalman Filter (EnKF) may suffer from a series of problems such as undersampling, covariance underestimation, filter divergence, and distanced spurious correlations, when the ensemble size is small. In particular, implementing the traditional Local Analysis (LA) method by the distance-based Gaspari and Cohn (GC) function can reduce the underestimation of background error covariance to some extent, but cannot completely eliminate the spurious correlation problem. In this study, a Fuzzy Analysis (FA) localization method coupled with the fuzzy logic control algorithm was proposed in the framework of the EnKF assimilation algorithm. In the design of the fuzzy logic controller, the distance between observation points and the corresponding status update points is taken as the fuzzy inputs. Through a series of fuzzy inference, more accurate fuzzy weight coefficients can be obtained as the control outputs, so as to reduce the observation error and improve the assimilation accuracy. Based on the Lorenz-96 model, the effectiveness of LA and FA under different model errors was compared; and the robustness of the two methods under ensemble numbers, observation numbers, and observation space, covariance inflation factor, and forced parameter change was discussed and analyzed. Meanwhile, Root Mean Square Error (RMSE) and Power Spectral Density (PSD) were used as performance indexes to evaluate the performance of the two algorithms. The experimental results show that the new localization method can correct the background error covariance matrix by constructing the corresponding equivalent weight of observation position to update local coefficient based on EnKF. To some extent, it can effectively eliminate the remote correlation between observations and state, and the observation data can be effectively utilized in the local scope. The FA algorithm can reduce the observation error, and the effectiveness and robustness of the new method was proved in nonlinear chaotic systems. These schemes illustrate that the new localization method based on Fuzzy Analysis of observation information can lead to a systematic improvement of the data assimilation performance. However, the determination of fuzzy distance and the calculation of fuzzy equivalent weight coefficient take extra long time; how to combine parallel computation with fuzzy control for improving assimilation efficiency remains to be further studied.
MA Xiaoyan , BAI Yulong , TANG Lihong , WANG Yue , LI Shanshan . A New Localization Method based on Fuzzy Analysis of Observation Information[J]. Journal of Geo-information Science, 2019 , 21(12) : 1855 -1866 . DOI: 10.12082/dqxxkx.2019.190271
表1 输入模糊变量与输出模糊变量对应规则表Tab. 1 Fuzzy control rules for input and output fuzzy variables |
| d | 0~1.5 | 1.5~2.5 | 2.5~3.5 | 3.5~4.5 | 4.5~5.5 | … | 18.5~20.0 |
|---|---|---|---|---|---|---|---|
| w | 1~0.95 | 0.95~0.90 | 0.90~0.85 | 0.85~0.80 | 0.80~0.75 | … | 0.1~0 |
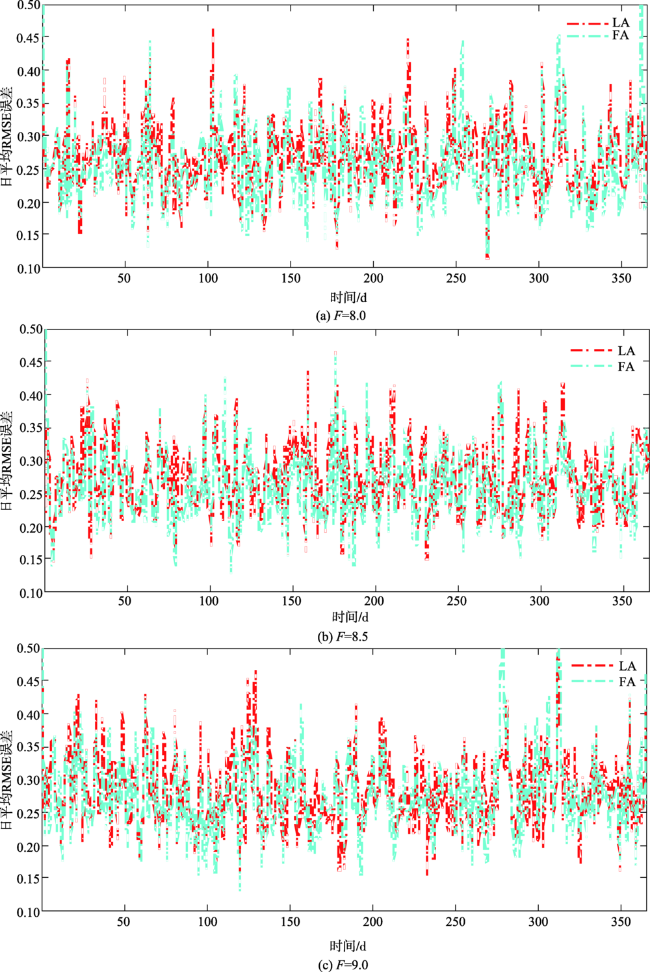
Tab. 2 Percentages of RMSE reduction based on the two local algorithms over 365 simulated days |
| 模型误差(F) | |||
|---|---|---|---|
| 局地化算法 | 8.0 | 8.5 | 9.0 |
| LA | 0.274 | 0.284 | 0.301 |
| FA | 0.226 | 0.253 | 0.275 |
| RMSE减小的百分比/% | 17.5 | 10.9 | 8.6 |
表3 LA与FA算法的具体实验参数设置Tab. 3 Specific experimental parameters settings for the LA and FA algorithms |
| 集合数 (N) | 观测数 (O) | 放大因子 (inf) | 强迫参数 (F) | |
|---|---|---|---|---|
| 实验1 | 5~20 | 40 | 1.08 | 8 |
| 实验2 | 20 | 5~40 | 1.08 | 8 |
| 实验3 | 20 | 40 | 1.01~1.12 | 8 |
| 实验4 | 20 | 40 | 1.08 | 4~12 |
| [1] |
李新, 黄春林, 车涛 , 等. 中国陆面数据同化系统研究的进展与前瞻[J]. 自然科学进展, 2007,17(2):163-173.
[
|
| [2] |
李新 . 陆地表层系统模拟和观测的不确定性及其控制[J]. 中国科学:地球科学, 2013,43:1735-1742.
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
韩培, 舒红, 许剑辉 . EnKF同化的背景误差协方差矩阵局地化对比研究[J]. 地球科学进展, 2014,29(10):1175-1185.
[
|
| [14] |
韩培, 舒红, 许剑辉 , 等. 局地化方法在集合转换卡尔曼滤波同化的适用性研究[J]. 地球信息科学学报, 2016,18(9):1184-1190.
[
|
| [15] |
韩华, 刘凤鸣, 丁永生 . 基于海洋综合观测网络平台的信息模糊融合研究[C]. 中国灾害防御协会风险分析专委会年会, 2008: 284-289.
[
|
| [16] |
|
| [17] |
卢勇男, 摆玉龙, 徐宝兄 . 耦合模糊控制算法的数据同化观测误差处理方法[J]. 遥感技术与应用, 2017,32(3):459-465.
[
|
| [18] |
常明恒, 摆玉龙, 马小艳 , 等. 一种新的耦合模糊控制局地化的同化方法[J]. 地球科学进展, 2018,33(8):874-883.
[
|
| [19] |
|
| [20] |
|
| [21] |
陈国范 . 模糊数学与天气预报[J]. 气象, 1979,5(6):22-24.
[
|
| [22] |
王耀南 . 智能控制系统[M]. 长沙: 湖南大学出版社, 2006.
[
|
| [23] |
贾斌, 吴东华, 胡伟 . 智能技术在电力系统自动化中的应用探讨[J]. 科技资讯, 2010(33):60-60.
[
|
| [24] |
何平, 王鸿绪 . 模糊控制的设计及应用[M]. 北京: 科学出版社, 1997: 234-260.
[
|
| [25] |
侯志祥, 刘振闻 . 基于MATLAB的模糊控制器的设计与仿真[J]. 微计算机信息, 2001,17(9):20-21.
[
|
| [26] |
刘丙杰, 胡昌华 . 基于高斯隶属函数的模糊定性仿真[J]. 系统工程与电子技术, 2006(7):161-165.
[
|
| [27] |
谢季坚, 刘承平 . 模糊数学方法及其应用[M]. 武汉: 华中理工大学出版社, 2005.
[
|
| [28] |
|
| [29] |
|
| [30] |
张洪芹, 田向军, 张承明 , 等. 非线性集合四维变分同化方法NLS-4DVar之局地化改进[J]. 中国海洋大学学报(自然科学版), 2016,46(10):10-15.
[
|
| [31] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}