
Journal of Geo-information Science >
Airborne LiDAR 3D Filtering based on Intensity Voxel Primitive
Received date: 2019-02-15
Request revised date: 2019-07-22
Online published: 2019-12-25
Supported by
Natural Science Foundation of Liaoning Province of China(20170540419)
Scientific Research Fund of Liaoning Provincial Education Department(LJ2019JL015)
Copyright
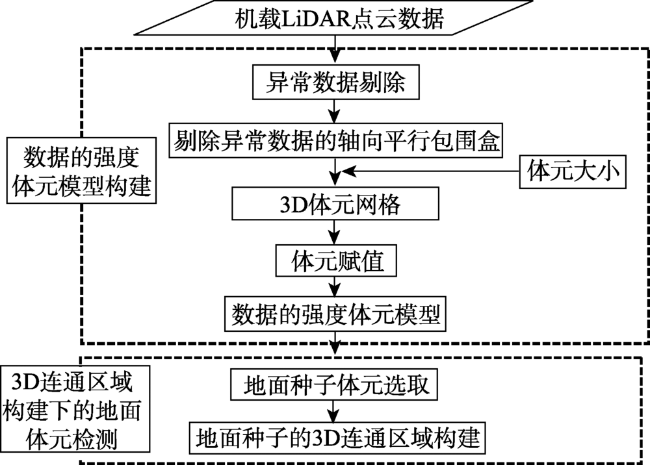
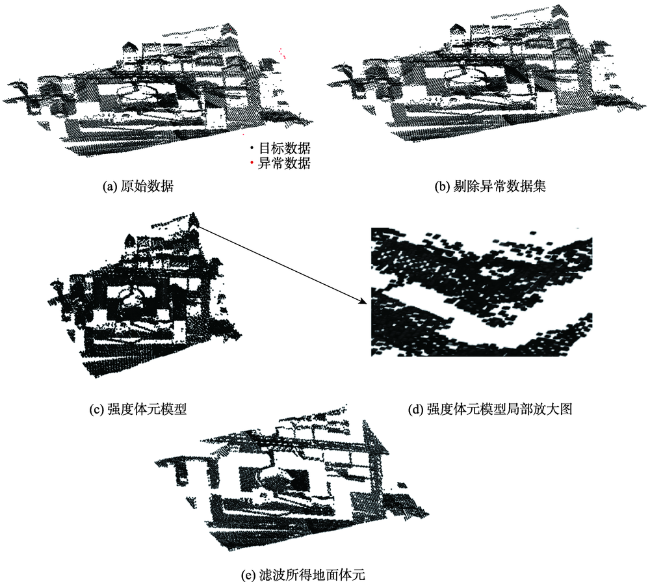
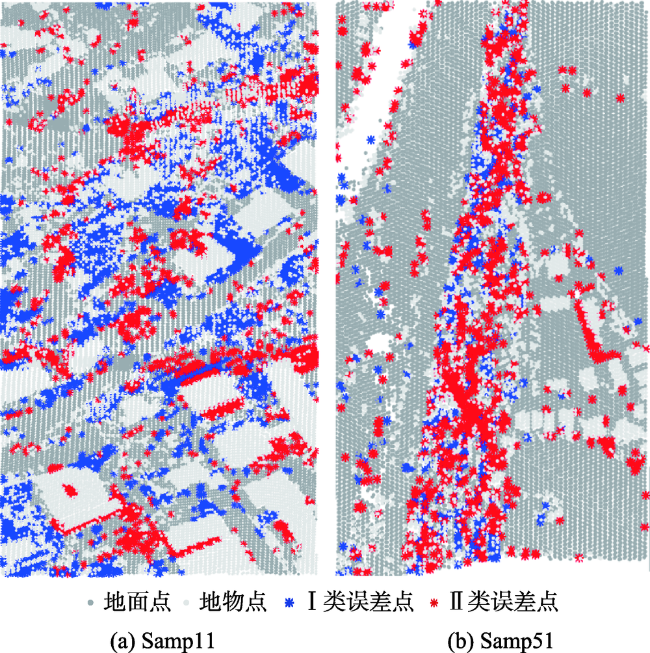
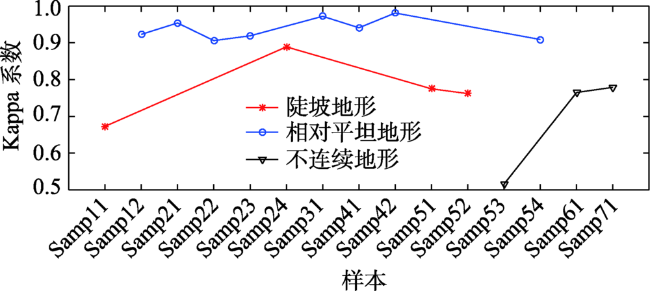
The existing binary voxel primitive based 3-Dimensional (3D) filtering algorithms for airborne Light Detection And Ranging (LiDAR) data, which use only elevation features, cannot distinguish between connected ground and non-ground objects. As a result, an airborne LiDAR 3D filtering algorithm based on intensity voxel primitive was proposed in the present study. First, airborne LiDAR data were regularized into intensity voxel structure based on computational geometry theory, in which intensity value of the voxel corresponds to the quantized intensity of the LiDAR point(s) within the voxel. Second, based on the theory of 3D connected region construction, the non-zero voxels with the lowest local elevation was selected as ground seeds, and then ground seeds and their connected regions where the voxels are 3D connected and have similar grayscales and slope with seeds were labelled as ground voxels. The proposed algorithm makes comprehensive use of the features of elevation, reflection intensity, and slope, supports 3D filtering in areas where the ground are adjacent to non-ground objects but with different intensities, and provides more effective information for the accurate distinction between the connected ground and non-ground objects. The proposed algorithm is helpful to improve the filtering accuracy and extend voxel primitive based 3D filtering algorithm for more complex scenes. The International Society for Photogrammetry and Remote Sensing (ISPRS) benchmark dataset, which contains a variety of features that is expected to be difficult for automatic filtering, were used to analyze the sensitivity of “spatial adjacency size” parameter in the proposed algorithm and to assess the accuracy of the proposed algorithm quantitatively. Results show: (1) The 51-adjacency was the optimal spatial adjacent size. (2) The average Kappa coefficient of the proposed algorithm was 0.9380, 0.7749, and 0.6866 in relatively flat, steep slope, and discontinuous terrain areas, respectively. (3) In terms of total error, the proposed algorithm improved the accuracy of 7 out of 15 samples and had a higher accuracy than all other binary voxel primitive based 3D filtering algorith-ms on average.
Key words: LiDAR; filtering; voxel; intensity; connected region; spatial adjacency size
WANG Liying , WANG Sheng , LI Yu . Airborne LiDAR 3D Filtering based on Intensity Voxel Primitive[J]. Journal of Geo-information Science, 2019 , 21(12) : 1945 -1954 . DOI: 10.12082/dqxxkx.2019.190152
表1 测试数据集特征Tab. 1 Features of the test dataset |
| 样本 | 特征 | 点数/个 | 密度/点/m-2 | 地形特征 |
|---|---|---|---|---|
| Samp11 | 城区 | 38 010 | 1.066 | 陡坡上混合有植被和建筑物 |
| Samp12 | 城区 | 52 119 | 1.036 | 小物体(车辆等)、混合植被和建筑物 |
| Samp21 | 城区 | 12 960 | 1.096 | 狭窄的桥梁、植被 |
| Samp22 | 城区 | 32 706 | 1.039 | 桥梁(西南方向)、通道(东北方向) |
| Samp23 | 城区 | 25 095 | 1.198 | 大的不规则形状的建筑物 |
| Samp24 | 城区 | 7492 | 1.172 | 斜坡 |
| Samp31 | 城区 | 28 862 | 0.976 | 复杂屋顶、高低混合地物 |
| Samp41 | 城区 | 11 231 | 1.553 | 大的数据空洞、不规则建筑物 |
| Samp42 | 城区 | 42 470 | 1.084 | 铁路、高频率的地形起伏 |
| Samp51 | 山区 | 17 845 | 5.509 | 斜坡、密集植被 |
| Samp52 | 山区 | 22 474 | 5.984 | 断层、矮小植被 |
| Samp53 | 山区 | 34 378 | 5.689 | 间断的陡峭地形 |
| Samp54 | 山区 | 8608 | 5.758 | 地形表面有密集覆盖物 |
| Samp61 | 山区 | 35 060 | 6.382 | 不连续的陡坡、山脊、沟渠 |
| Samp71 | 山区 | 15 645 | 5.403 | 间断地形、地下通道 |
表2 不同空间邻域尺寸的滤波算法的Kappa系数Tab. 2 Kappa coefficients of the proposed algorithm with different spatial adjacency sizes |
| 样本 | Kappa系数 | |||||
|---|---|---|---|---|---|---|
| 6邻域 | 18邻域 | 26邻域 | 56邻域 | 64邻域 | 51邻域 | |
| 城区 Samp11 | 0.4271 | 0.5110 | 0.5303 | 0.6495 | 0.6551 | 0.6729 |
| Samp12 | 0.8779 | 0.9042 | 0.9059 | 0.9232 | 0.9228 | 0.9232 |
| Samp21 | 0.9303 | 0.9494 | 0.9485 | 0.9473 | 0.9462 | 0.9538 |
| Samp22 | 0.7958 | 0.8375 | 0.8624 | 0.9062 | 0.9026 | 0.9064 |
| Samp23 | 0.8499 | 0.8855 | 0.8880 | 0.9144 | 0.9148 | 0.9188 |
| Samp24 | 0.7274 | 0.8006 | 0.8143 | 0.8643 | 0.8612 | 0.8892 |
| Samp31 | 0.9544 | 0.9624 | 0.9646 | 0.9701 | 0.9694 | 0.9718 |
| Samp41 | 0.9040 | 0.9386 | 0.9398 | 0.9389 | 0.9389 | 0.9409 |
| Samp42 | 0.9571 | 0.9771 | 0.9775 | 0.9790 | 0.9789 | 0.9806 |
| 山区 Samp51 | 0.7763 | 0.7937 | 0.7911 | 0.7670 | 0.7647 | 0.7751 |
| Samp52 | 0.2107 | 0.4741 | 0.6038 | 0.7606 | 0.7607 | 0.7623 |
| Samp53 | 0.3138 | 0.4430 | 0.4977 | 0.5049 | 0.5000 | 0.5162 |
| Samp54 | 0.8626 | 0.9020 | 0.9062 | 0.9065 | 0.9058 | 0.9086 |
| Samp61 | 0.5342 | 0.6877 | 0.7337 | 0.7564 | 0.7485 | 0.7648 |
| Samp71 | 0.6652 | 0.7263 | 0.7417 | 0.6917 | 0.6942 | 0.7787 |
| 平均 | 0.7191 | 0.7862 | 0.8070 | 0.8320 | 0.8309 | 0.8442 |
注:加粗数值表示不同空间邻域尺寸的滤波算法的Kappa系数最大值。 |
表3 Samp23中高程异常数据对体元模型构建及滤波结果的影响Tab. 3 Influence of elevation outliers in Samp23 on the construction of the voxel model and filtering results |
| 点云数据 | 点数/个 | 场景空间范围/m | 体元尺寸/m | 体元模型尺寸/个 | 非0值体元数/个 | 地面体元数/个 | 总误差/% |
|---|---|---|---|---|---|---|---|
| 原始 | 25 094 | 146×205.9×86.0 | 1.1×1.1×0.5 | 135×189×174 | 18 973 | 10 319 | 0.0505 |
| 剔除异常数据 | 25 077 | 146×105.9×43.5 | 1.1×1.1×0.4 | 135×189×110 | 19 344 | 10 351 | 0.0404 |
表4 算法误差和Kappa系数Tab. 4 Errors and Kappa coefficients of the proposed algorithm |
| 样本 | Ie | IIe | Te | Kappa系数 |
|---|---|---|---|---|
| Samp11 | 0.1546 | 0.1693 | 0.1609 | 0.6729 |
| Samp12 | 0.0410 | 0.0356 | 0.0384 | 0.9232 |
| Samp21 | 0.0107 | 0.0344 | 0.0160 | 0.9538 |
| Samp22 | 0.0363 | 0.0450 | 0.0405 | 0.9064 |
| Samp23 | 0.0246 | 0.0580 | 0.0404 | 0.9188 |
| Samp24 | 0.0250 | 0.0933 | 0.0438 | 0.8892 |
| Samp31 | 0.0094 | 0.0194 | 0.0140 | 0.9718 |
| Samp41 | 0.0211 | 0.0380 | 0.0296 | 0.9409 |
| Samp42 | 0.0123 | 0.0063 | 0.0080 | 0.9806 |
| Samp51 | 0.0398 | 0.2016 | 0.0751 | 0.7751 |
| Samp52 | 0.0113 | 0.2921 | 0.0409 | 0.7623 |
| Samp53 | 0.0133 | 0.5212 | 0.0338 | 0.5162 |
| Samp54 | 0.0158 | 0.0714 | 0.0457 | 0.9086 |
| Samp61 | 0.0026 | 0.3253 | 0.0137 | 0.7648 |
| Samp71 | 0.0221 | 0.2124 | 0.0437 | 0.7787 |
| 平均 | 0.0293 | 0.1416 | 0.0430 | 0.8442 |
注:Ie表示将地面点错分为非地面点比例;IIe表示将非地面点错分为地面点比例;Te表示错分的激光点的比例。 |
表5 本文算法与经典滤波算法总误差比较Tab. 5 Total error comparison between the proposed algorithm and three classical filtering algorithms |
| 样本 | Axelsson[18] | Wang等[30] | 王丽英等[31] | 本文算法 |
|---|---|---|---|---|
| Samp11 | 0.1076 | 0.1949 | 0.1862 | 0.1609 |
| Samp12 | 0.0325 | 0.0402 | 0.0487 | 0.0384 |
| Samp21 | 0.0425 | 0.0205 | 0.0174 | 0.016 |
| Samp22 | 0.0363 | 0.0497 | 0.0460 | 0.0405 |
| Samp23 | 0.0400 | 0.0591 | 0.0504 | 0.0404 |
| Samp24 | 0.0442 | 0.0634 | 0.0623 | 0.0438 |
| Samp31 | 0.0478 | 0.0158 | 0.0203 | 0.0140 |
| Samp41 | 0.1391 | 0.0217 | 0.0209 | 0.0296 |
| Samp42 | 0.0162 | 0.0107 | 0.0098 | 0.0080 |
| Samp51 | 0.0272 | 0.0809 | 0.0818 | 0.0751 |
| Samp52 | 0.0307 | 0.0490 | 0.0424 | 0.0409 |
| Samp53 | 0.0891 | 0.0346 | 0.0453 | 0.0338 |
| Samp54 | 0.0332 | 0.0562 | 0.0508 | 0.0457 |
| Samp61 | 0.0208 | 0.0193 | 0.0231 | 0.0137 |
| Samp71 | 0.0163 | 0.0542 | 0.0614 | 0.0437 |
| 平均 | 0.0482 | 0.0513 | 0.0511 | 0.0430 |
| [1] |
张继贤, 林祥国, 梁欣廉 . 点云信息提取研究进展和展望. 测绘学报, 2017,46(10):1460-1469.
[
|
| [2] |
|
| [3] |
|
| [4] |
郭波, 黄先锋, 张帆 , 等. 顾及空间上下文关系的Joint Boost点云分类及特征降维[J]. 测绘学报, 2013,42(5):715-721.
[
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
黄作维, 刘峰, 胡光伟 . 基于多尺度虚拟格网的LiDAR点云数据滤波改进方法[J]. 光学学报, 2017,37(8):346-355.
[
|
| [9] |
|
| [10] |
朱笑笑, 王成, 习晓环 , 等. 多级移动曲面拟合的自适应阈值点云滤波方法[J]. 测绘学报, 2018,47(2):153-160.
[
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
隋立春, 张熠斌, 柳艳 , 等. 基于改进的数学形态学算法的LiDAR点云数据滤波[J]. 测绘学报, 2012,39(4):390-396.
[
|
| [17] |
潘锁艳, 管海燕 . 机载多光谱LiDAR 数据的地物分类力法[J]. 测绘学报, 2018,47(2):198-207.
[
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
王丽英, 徐艳, 李玉 . 机载LiDAR点云体元化及其在3D滤波中的应用[J]. 仪器仪表学报, 2018,39(7):173-182.
[
|
| [30] |
赵泉华, 石雪, 王玉 , 等. 可变类空间约束高斯混合模型遥感图像分割[J]. 通信学报, 2017,38(2):34-43.
[
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}