
Journal of Geo-information Science >
Pair-wise Line Matching Algorithm based on Feature Similarity Constraints of Geometric Attributes between the Lines
Received date: 2019-06-25
Request revised date: 2019-10-23
Online published: 2020-11-25
Supported by
National Natural Science Foundation of China(41871379)
Key Laboratory of Earth Observation and Geospatial Information Science of NASG(201801)
Copyright
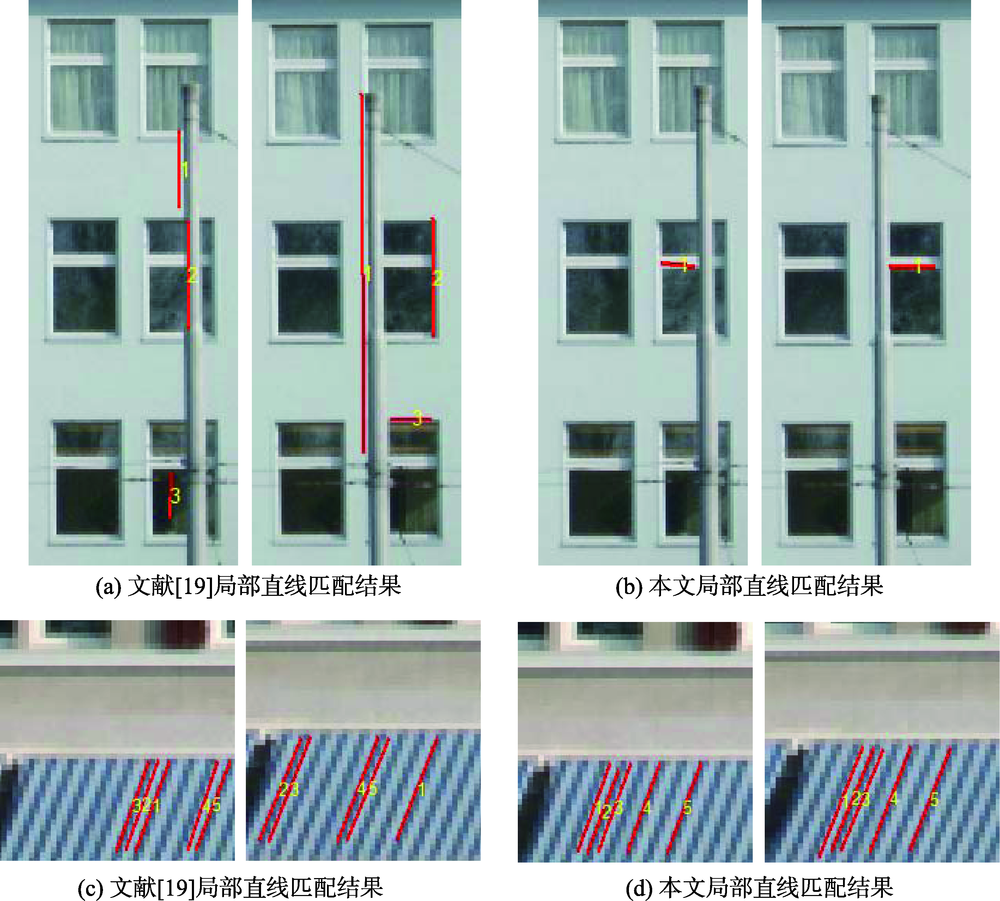
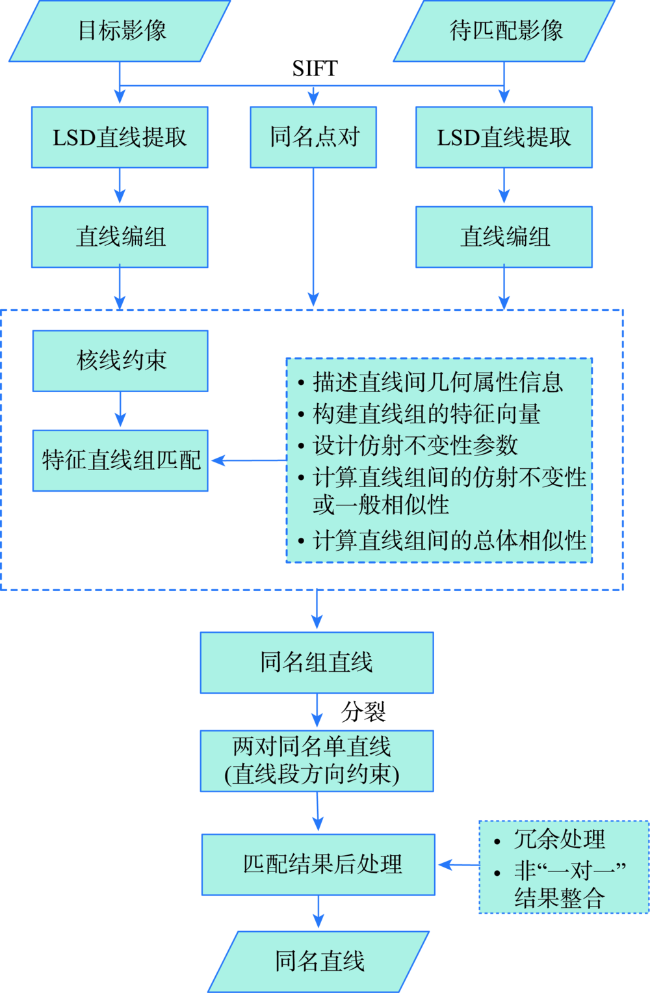
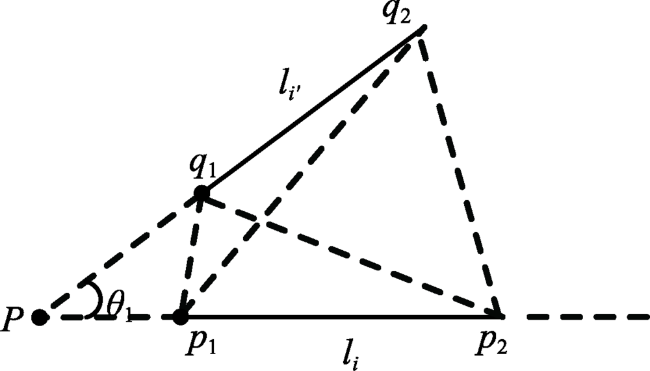
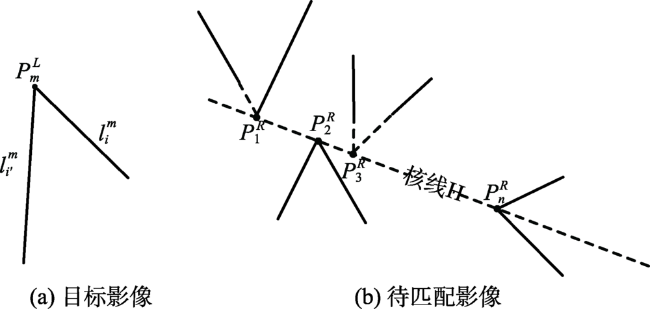
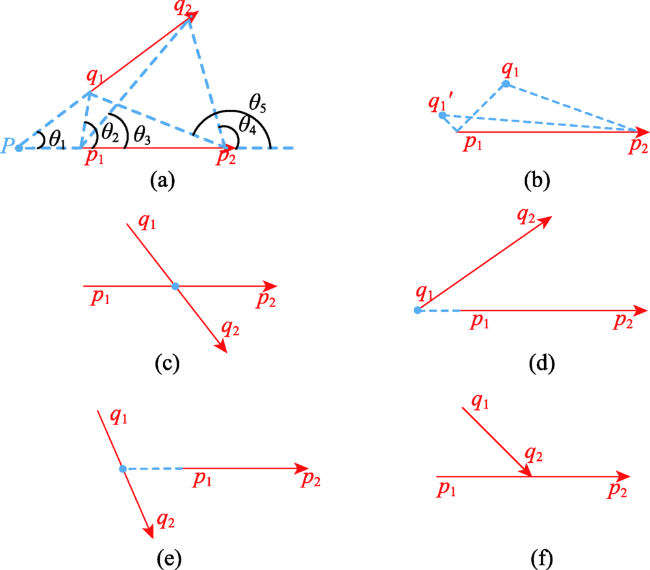
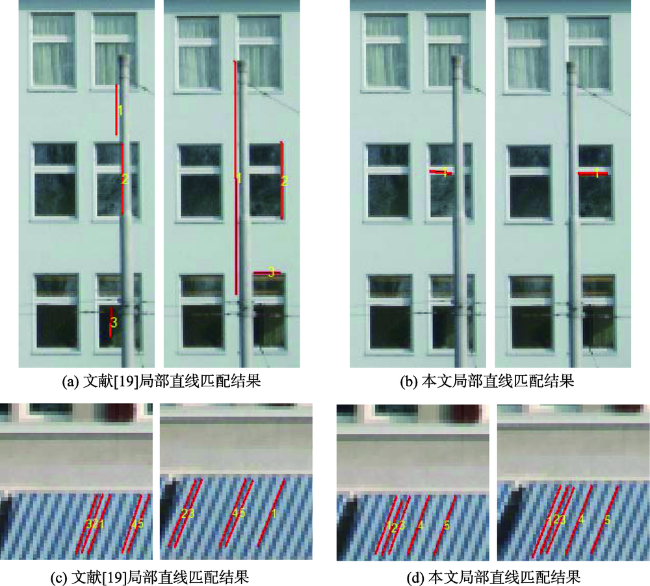
Many same or similar line features may hinder line matching in the image, matching only based on the similarity between individual line, which easily lead to the failure of the algorithm. Therefore, this paper proposed a reliable pair-wise line matching algorithm based on feature similarity constraints of geometric attributes between the lines. There are two challenges in constructing robust feature similarity constraints based on pair-wise line matching. The first challenge is to generate grouped line pairs under unstable lines extraction. This algorithm is handled by the basic geometric relationships such as distance and angle between the lines. The second challenge is to design a reliable feature descriptor robust to large viewpoint changes taking into account that the line pairs may not be coplanar and their endpoints are inaccurate. This algorithm salient not only against a range of viewpoint changes for close-range image but also large affine transformation. The construction method is described as follows. Firstly, line segments are extracted by using a line segment detector method and the corresponding points obtained by using SIFT matching points in the reference image and searching image.The algorithm generates grouped line pairs from lines extracted from the reference image and searching image according to the basic geometric relationships such as distance and angle between the lines, and it takes the grouped line pairs as matching primitives. Then the method employs the epipolar constraint to evaluate candidate line pairs. Line matching algorithm based on geometric attributes of lines for descriptor and similarity measure of line pairs are presented which is more distinctive by describing the relationship between every two pairs. The configuration of two line pairs is described by distinguishing two cases, in the first case, the similarity of the two line pairs is called as affine similarity; In another case, it is called general similarity. The affine similarity and general similarity are used as the overall similarity measure in this algorithm and are determined based on the calculated feature vectors between the target line pairs and each candidate line pairs. Instead of screening all candidate line pairs, the optimal line pairs mapping that maximizes the similarity measure between the two line pairs. Finally, the direction constraint which can provide a solution for angle transformation caused by image rotation in line pairs matching is used to perform the correspondence of individual line, it resolves the corresponding line pairs into two pairs of corresponding individual lines, and obtains one to one matching results after the post-processing of checking. Five typical groups of close-range image pairs with angle, rotation, and scale transformation are used as the experimental dataset, which is used to complete the line pairs matching experiments by the proposed algorithm. In comparison with other line matching algorithms, the proposed method can obtain more accurate line matching results in different typical close-range image pairs, and its matching ratio increased by 14.5. The experiment results demonstrate that the effect of threshold selection is weak and the algorithm is robust which achieves reliable line matching results.
HE Wanying , WANG Jingxue . Pair-wise Line Matching Algorithm based on Feature Similarity Constraints of Geometric Attributes between the Lines[J]. Journal of Geo-information Science, 2020 , 22(9) : 1766 -1778 . DOI: 10.12082/dqxxkx.2020.190334
表1 直线夹角的直线匹配结果Tab. 1 Line matching results by different parameter |
| =80/像素 | =1/像素 | = | |||||
|---|---|---|---|---|---|---|---|
| 值 | 值 | 值 | 整合后同名 直线数目/对 | 正确匹配 数目/对 | 匹配 正确率∕% | ||
| 0.1 | 1 | 1 | 225 | 212 | 94.22 | ||
| 0.2 | 2 | 2 | 230 | 218 | 94.78 | ||
| 0.3 | 3 | 3 | 234 | 223 | 95.30 | ||
| 0.4 | 4 | 4 | 231 | 219 | 94.81 | ||
| 0.5 | 5 | 5 | 227 | 214 | 94.27 | ||
表2 直线夹角的直线匹配结果Tab. 2 Line matching results by different parameter |
| =100/像素 | =1/像素 | = | |||||
|---|---|---|---|---|---|---|---|
| 值 | 值 | 值 | 整合后同名 直线数目/对 | 正确匹配 数目/对 | 匹配 正确率∕% | ||
| 0.1 | 1 | 1 | 260 | 254 | 97.44 | ||
| 0.2 | 2 | 2 | 263 | 257 | 97.45 | ||
| 0.3 | 3 | 3 | 269 | 263 | 97.76 | ||
| 0.4 | 4 | 4 | 265 | 259 | 97.20 | ||
| 0.5 | 5 | 5 | 262 | 256 | 97.17 | ||
表3 直线夹角的直线匹配结果Tab. 3 Line matching results by different parameter |
| =120/像素 | =1/像素 | = | |||||
|---|---|---|---|---|---|---|---|
| 值 | 值 | 值 | 整合后同名 直线数目/对 | 正确匹配 数目/对 | 匹配 正确率∕% | ||
| 0.1 | 1 | 1 | 250 | 241 | 96.40 | ||
| 0.2 | 2 | 2 | 257 | 248 | 96.50 | ||
| 0.3 | 3 | 3 | 266 | 257 | 96.62 | ||
| 0.4 | 4 | 4 | 263 | 254 | 96.58 | ||
| 0.5 | 5 | 5 | 260 | 251 | 96.54 | ||
表4 4种算法匹配结果对比分析Tab. 4 Comparative analysis of matching results by four methods |
| 实验影像 | 编组直线组数目/对 | 不同算法 | 同名直线 组数目/对 | 同名单直线 对数目/对 | 整合后同名 直线数目/对 | 正确匹配 数目/对 | 匹配 正确率∕% | 运行 时间/s | |
|---|---|---|---|---|---|---|---|---|---|
| 目标影像 | 待匹配影像 | ||||||||
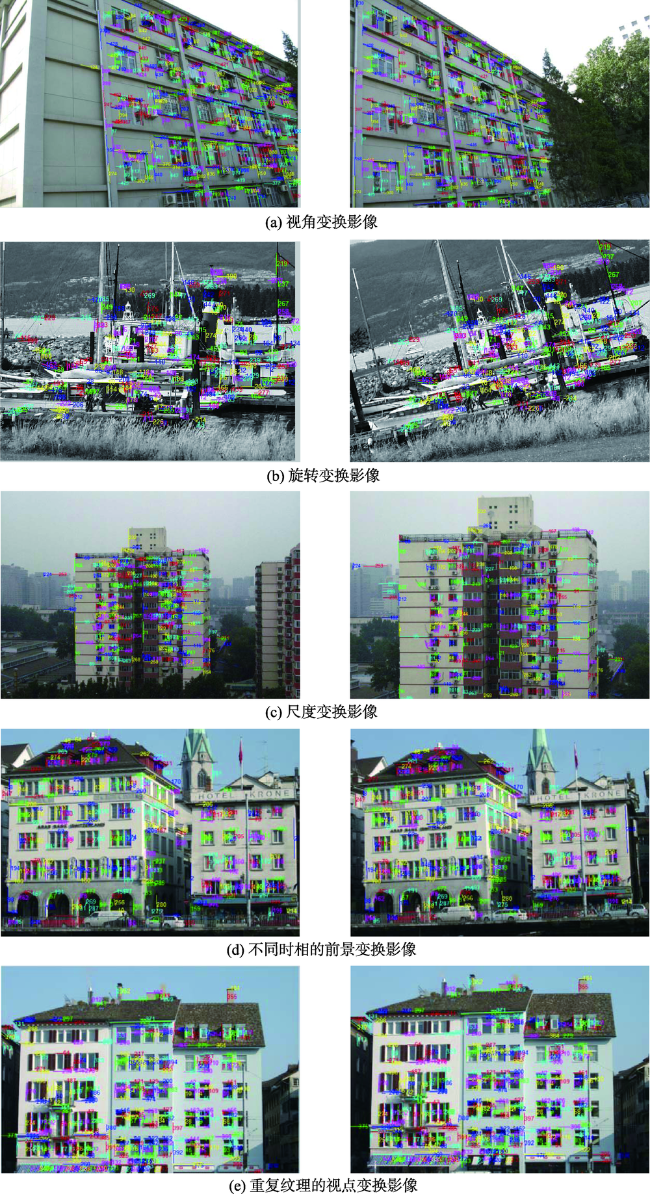
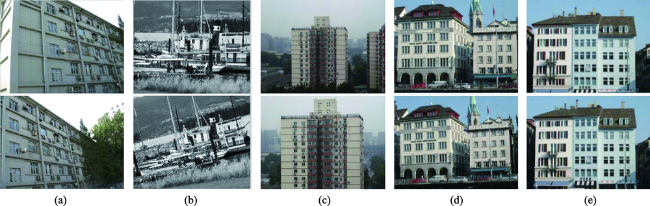
| 图6(a) | 2570 | 2620 | 文献[11] 文献[26] 文献[19] 本文算法 | N/A | 327 | 322 341 390 446 | 302 321 382 435 | 93.7 94.1 97.9 97.5 | 101 206 |
| 685 | 1250 | ||||||||
| N/A | 911 | 135 | |||||||
| 487 | 915 | 217 | |||||||
| 图6(b) | 1603 | 2218 | 文献[11] 文献[26] 文献[19] 本文算法 | N/A | 223 | 221 193 366 277 | 184 185 357 271 | 83.3 95.7 97.5 97.8 | 63 |
| 301 | 553 | 119 | |||||||
| N/A | 605 | 107 | |||||||
| 254 | 387 | 135 | |||||||
| 图6(c) | 2359 | 1887 | 文献[11] 文献[26] 文献[19] 本文算法 | N/A | 109 | 99 237 214 269 | 85 222 207 263 | 85.8 93.7 96.7 97.8 | 28 |
| 456 | 807 | 139 | |||||||
| N/A | 344 | 132 143 | |||||||
| 329 | 593 | ||||||||
| 图6(d) | 3793 | 3345 | 文献[11] 文献[26] 文献[19] 本文算法 | N/A | 378 | 346 333 371 287 | 303 313 364 284 | 87.6 94.0 98.1 99.0 | 104 |
| 564 | 908 | 202 | |||||||
| N/A | 770 | 129 | |||||||
| 372 | 668 | 164 | |||||||
| 图6(e) | 3196 | 3474 | 文献[11] 文献[26] 文献[19] 本文算法 | N/A | 303 | 262 386 297 397 | 242 372 273 388 | 92.4 96.4 91.9 97.7 | 81 |
| 466 | 732 | 238 | |||||||
| N/A | 680 | 96 | |||||||
| 338 | 642 | 241 | |||||||
| [1] |
|
| [2] |
傅丹, 王超, 徐一丹, 等. 一种直线段匹配的新方法[J]. 国防科技大学学报, 2008,30(1):115-119.
[
|
| [3] |
寇媛, 徐景中. 基于结构特征的遥感影像匹配[J]. 中国图象图形学报, 2013,18(5):565-573.
[
|
| [4] |
|
| [5] |
邓刘洋, 沈占锋, 柯映明. 城市建成区遥感影像边界提取与扩张分析[J]. 地球信息科学学报, 2018,20(7):996-1003.
[
|
| [6] |
高新凯. 基于几何不变量的直线匹配与三维建模[D]. 大连:大连理工大学, 2017.
[
|
| [7] |
席学强, 王润生. 基于直线特征的图像-模型匹配算法[J]. 国防科技大学学报, 2000,22(6):70-74.
[
|
| [8] |
邵振峰, 陈敏. 尺度、旋转以及亮度稳健的高分辨率影像直线特征匹配[J]. 光学精密工程, 2013,21(3):790-798.
[
|
| [9] |
|
| [10] |
王竞雪, 崔昊. 局部点、线仿射不变性约束的近景影像直线段匹配[J]. 地球信息科学学报, 2019,21(2):137-146.
[
|
| [11] |
|
| [12] |
梁艳, 盛业华, 张卡, 等. 利用局部仿射不变及核线约束的近景影像直线特征匹配[J]. 武汉大学学报·信息科学版, 2014,39(2):229-233.
[
|
| [13] |
欧阳欢, 范大昭, 纪松, 雷蓉. 结合离散化描述与同名点约束的线特征匹配[J]. 测绘学报, 2018,47(10):1363-1371.
[
|
| [14] |
张云生, 朱庆, 吴波, 等. 一种基于三角网约束的立体影像线特征多级匹配方法[J]. 武汉大学学报·信息科学版, 2013,38(5):522-527.
[
|
| [15] |
|
| [16] |
|
| [17] |
王志衡, 吴福朝. 均值-标准差描述子与直线匹配[J]. 模式识别与人工智能, 2009,22(1):32-39.
[
|
| [18] |
|
| [19] |
|
| [20] |
文贡坚. 一种基于特征编组的直线立体匹配全局算法[J]. 软件学报, 2006,17(12):2471-2484.
[
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
王竞雪, 朱庆, 王伟玺. 顾及拓扑关系的立体影像直线特征可靠匹配算法[J]. 测绘学报, 2017,46(11):1850-1858.
[
|
| [25] |
|
| [26] |
|
| [27] |
王竞雪, 宋伟东, 王伟玺. 同名点及高程平面约束的航空影像直线匹配算法[J]. 测绘学报, 2016,45(1):87-95.
[
|
| [28] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}