
Journal of Geo-information Science >
The Research on Normalized Radiometric Calibration Method of Optical Satellite
Received date: 2019-09-24
Request revised date: 2020-08-03
Online published: 2021-02-25
Supported by
National Natural Science Foundation of China(41971412)
National Key Research and Development Program of China(2016YFB0500801)
Copyright
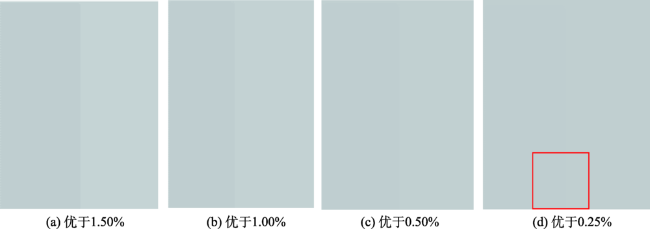
The relative radiometric calibration of optical satellite sensors minimizes the inconsistency of linear or non-linear responses of the sensor detectors with different incident radiances. It is a prerequisite of various types of high-quality remote sensing products. The response of on-orbit sensor changes with time due to factors such as launch induced vibration, space environment changes, and the sensor degradation. However, both the one-time relative radiometric calibration and single relative radiometric calibration methods cannot guarantee the consistency in responses of satellite sensors at a specific time. Therefore, the normalized on-orbit radiometric calibration method with high frequency and high precision for satellite sensors is necessary for better applications of remote sensing products. In this study, we focused on the image radiometric calibration of the whole life cycle of optical satellite sensors, and the high-frequency, high-precision, wide or full dynamic range on-orbit relative radiometric calibration methods. Also, we summarized the existing accuracy evaluation methods of relative radiometric calibration methods as well as their application scenarios. In our study, the LJ1-01 nighttime satellite images were used to verify the dark current and uniform field calibration methods. The Zhuhai1 group 02 hyperspectral satellite images were used to verify the statistical calibration and yawing radiometric calibration methods as well as the normalized radiometric calibration method integrated by a variety of calibration methods. Our results show that the stripe coefficient was less than 0.25%, with a higher relative standard deviation of the images (3.00%) than images processed by each individual evaluation method. The normalized radiometric calibration method integrated by various calibration methods maximizes the advantages of individual calibration methods and is capable of high precision on-orbit calibration for common sensors, which further guarantees the quality of remote sensing products and meets the requirements of quantitative application.
SHI Yingrui , JIANG Yang , LI Litao , YU Longjiang , JIANG Yonghua . The Research on Normalized Radiometric Calibration Method of Optical Satellite[J]. Journal of Geo-information Science, 2020 , 22(12) : 2410 -2424 . DOI: 10.12082/dqxxkx.2020.190536
表1 LJ1-01星HDR模式暗电流定标精度统计Tab. 1 Statistical table of dark current calibration accuracy of LJ1-01 HDR mode (DN) |
| 均值 | 最大值 | 最小值 | 相对标准差 | |
|---|---|---|---|---|
| 低增益 | 176.59 | 176.81 | 176.41 | 0.07 |
| 高增益 | 186.82 | 186.97 | 186.66 | 0.04 |
表2 LJ1-01白天在轨定标均匀场区域Tab. 2 Uniform field of on-orbit calibration during the day |
| 均匀定标场地 | 纬度 | 经度 | 场地大小/km×km |
|---|---|---|---|
| Arabia 2, Middle East | 20.24° N | 51.03° E | 171×171 |
| Niger 2, Sahara | 21.36° N | 10.59° E | 108×72 |
| Mauritania 2, Sahara | 20.23° N | 8.77° W | 72×108 |
| Egypt 2, Sahara | 22.94° N | 28.79° E | 171×162 |
表3 OHS高光谱卫星载荷参数Tab. 3 OHS hyperspectral satellite load parameters |
| 类型 | 内容 |
|---|---|
| 轨道类型 | 500 km太阳同步轨道 |
| 空间分辨率/m | 10 |
| 波段数量 | 32 |
| 光谱范围/nm | 400~1000 |
| 光谱分辨率/nm | 2.5 |
| 幅宽/km | 150 |
| 成像方式 | 线阵推扫式成像 |
| 光谱范围重构 | 支持 |
表4 OHS-A星精度评价数据概况Tab. 4 Overview of OHS-A hyperspectral satellite calibration accuracy evaluation data |
| 数据名称 | 数据探(CCD) | 数据大小(长×宽)/(像元×像元) | 数据概图 |
|---|---|---|---|
| HAM1_20180813221413 | CCD1 | 3400×1800 |  |
| HAM1_20180813221413 | CCD2 | 1280×2050 |  |
| HAM1_20180813221413 | CCD3 | 1500×1200 |  |
| HAM1_20180812222302 | CCD1 | 2240×2100 |  |
| HAM1_20180812222302 | CCD2 | 2700×2200 |  |
| HAM1_20180812222302 | CCD3 | 1800×1800 |  |
表5 OHS-A星精度评价结果Tab. 5 The OHS-A hyperspectral satellite calibration accuracy evaluation results |
| 波段号 | 相对标准差/% | 最大条纹系数/% | ||||
|---|---|---|---|---|---|---|
| CCD1 | CCD2 | CCD3 | CCD1 | CCD2 | CCD3 | |
| B1 | 0.63 | 0.47 | 0.81 | 0.06 | 0.08 | 0.06 |
| B2 | 0.64 | 0.57 | 0.88 | 0.06 | 0.08 | 0.06 |
| B3 | 0.66 | 0.65 | 0.87 | 0.06 | 0.08 | 0.06 |
| B4 | 0.66 | 0.65 | 0.81 | 0.06 | 0.07 | 0.07 |
| B5 | 0.59 | 0.64 | 0.80 | 0.07 | 0.07 | 0.08 |
| B6 | 0.53 | 0.70 | 1.32 | 0.08 | 0.07 | 0.08 |
| B7 | 0.55 | 0.75 | 1.02 | 0.07 | 0.07 | 0.07 |
| B8 | 0.63 | 0.88 | 0.95 | 0.07 | 0.08 | 0.08 |
| B9 | 0.73 | 0.97 | 0.77 | 0.08 | 0.09 | 0.09 |
| B10 | 0.77 | 1.07 | 0.83 | 0.08 | 0.09 | 0.08 |
| B11 | 0.83 | 1.12 | 0.81 | 0.07 | 0.09 | 0.08 |
| B12 | 0.95 | 1.14 | 0.89 | 0.07 | 0.09 | 0.08 |
| B13 | 0.97 | 1.24 | 0.85 | 0.08 | 0.10 | 0.09 |
| B14 | 1.01 | 1.22 | 0.88 | 0.08 | 0.10 | 0.09 |
| B15 | 1.10 | 1.22 | 0.98 | 0.08 | 0.10 | 0.08 |
| B16 | 1.05 | 1.11 | 0.82 | 0.09 | 0.10 | 0.11 |
| B17 | 1.74 | 0.99 | 1.07 | 0.10 | 0.10 | 0.10 |
| B18 | 1.32 | 0.77 | 0.91 | 0.10 | 0.09 | 0.10 |
| B19 | 2.28 | 0.55 | 2.48 | 0.12 | 0.07 | 0.10 |
| B20 | 2.05 | 0.61 | 1.66 | 0.15 | 0.07 | 0.13 |
| B21 | 1.85 | 0.49 | 1.46 | 0.14 | 0.06 | 0.16 |
| B22 | 1.62 | 0.31 | 1.15 | 0.11 | 0.06 | 0.12 |
| B23 | 1.68 | 0.52 | 1.14 | 0.12 | 0.07 | 0.12 |
| B24 | 1.79 | 0.37 | 2.85 | 0.13 | 0.07 | 0.11 |
| B25 | 1.59 | 0.31 | 0.94 | 0.12 | 0.06 | 0.11 |
| B26 | 1.64 | 0.48 | 1.14 | 0.11 | 0.06 | 0.11 |
| B27 | 1.49 | 1.07 | 1.10 | 0.11 | 0.09 | 0.11 |
| B28 | 1.39 | 0.88 | 1.45 | 0.09 | 0.08 | 0.08 |
| B29 | 2.52 | 1.93 | 2.33 | 0.14 | 0.11 | 0.14 |
| B30 | 0.95 | 0.67 | 1.12 | 0.10 | 0.10 | 0.11 |
| B31 | 0.89 | 0.97 | 1.19 | 0.09 | 0.09 | 0.12 |
| B32 | 0.65 | 0.79 | 1.25 | 0.10 | 0.10 | 0.10 |
表6 OHS-D星偏航定标成像数据信息Tab. 6 The OHS-D satellite yaw calibration imaging data information |
| 序号 | 成像时间 | 有效数据行 | 成像参数 | 用途 |
|---|---|---|---|---|
| 区域1 | 24日 | 31944 | 增益:30 级数:6-6-6-6-6-6-6-6-5-5-5-5-4-4-4-3-3-3-3-3-3-3-3-3-3-3-3-4-5-5-6-8 | 定标/验证 |
| 区域2 | 25日 | 10944 | 定标/验证 | |
| 区域3 | 24日 | 26945 | 定标/验证 | |
| 区域4 | 24日 | 17944 | 定标/验证 |
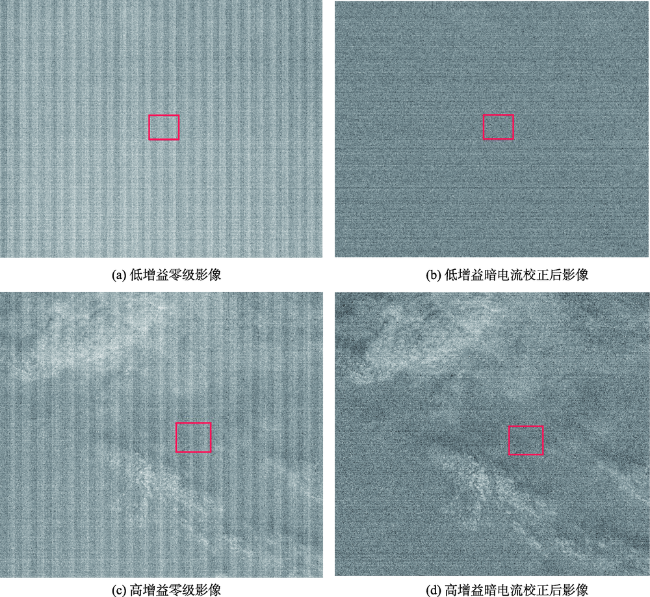
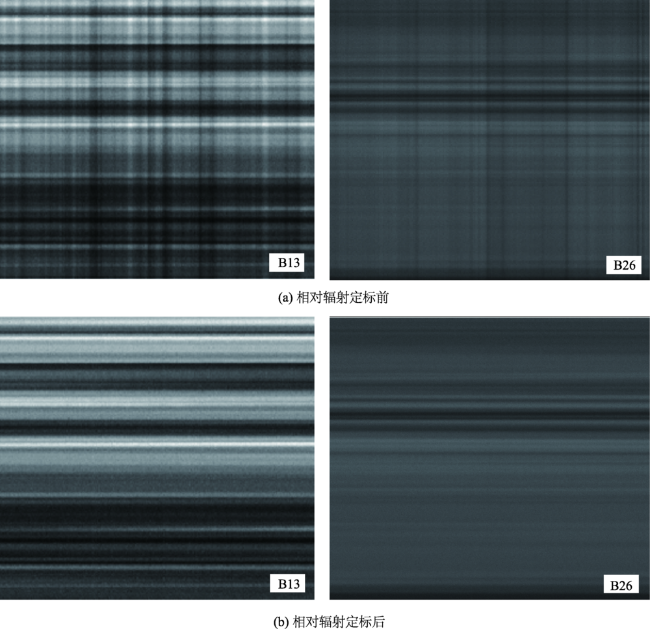
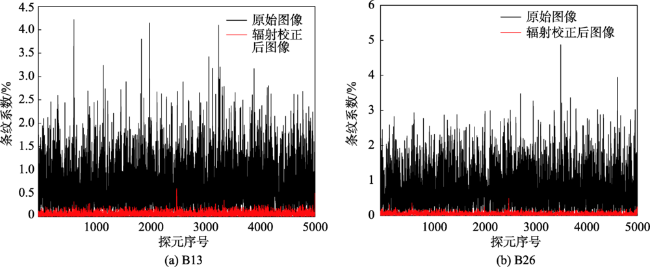
图10 OHS-D 星CCD1传感器定标前后条纹系数对比Fig. 10 Comparison of stripe coefficients of OHS-D hyperspectral satellite CCD1 sensor before, and after relative radiometric calibration |
表7 OHS-D星传感器各波段定标后条纹系数统计Tab. 7 Statistical table of stripe coefficient after OHS-D satellite sensor calibration |
| 波段号 | 最小值 | 最大值 | 均值 | 标准差 | 亮度范围 |
|---|---|---|---|---|---|
| B2 | 0.00 | 0.16 | 0.01 | 0.02 | 低+中+高 |
| B9 | 0.00 | 0.24 | 0.02 | 0.02 | 低+中 |
| B13 | 0.00 | 0.13 | 0.03 | 0.02 | 中+高 |
| B18 | 0.00 | 0.16 | 0.03 | 0.02 | 低+中+高 |
| B26 | 0.00 | 0.11 | 0.02 | 0.01 | 中+高 |
| B32 | 0.00 | 0.25 | 0.03 | 0.03 | 中+高 |
| [1] |
朱军, 吴雁林, 沈中, 等. 环境-1A、1B卫星CCD相机系统级辐射定标数据分析[J]. 航天器工程, 2009,18(5):73-79.
[
|
| [2] |
龙亮, 王中民. 一种基于卫星敏捷特性的在轨辐射定标方法[J]. 航天返回与遥感, 2013(4):77-85.
[
|
| [3] |
胡永富, 张宇烽. 空间相机相对辐射定标精度分析[J]. 航天返回与遥感, 2007,28(4):54-57.
[
|
| [4] |
韩启金, 张学文, 乔志远, 等. 高分一号卫星PMS相机多场地宽动态辐射定标[J]. 红外与激光工程, 2015(1):127-133.
[
|
| [5] |
|
| [6] |
|
| [7] |
张过, 李立涛. 遥感25号无场化相对辐射定标[J]. 测绘学报, 2017,46(8):1009-1016.
[
|
| [8] |
李海超, 郝胜勇. 一种推扫式卫星图像的相对辐射校正方法[J]. 光电工程, 2011,38(1):142-150.
[
|
| [9] |
|
| [10] |
|
| [11] |
张兵, 张浩, 陈正超, 等. 一种基于图像统计量的相对辐射纠正算法[J]. 遥感学报, 2006,10(5):630-635.
[
|
| [12] |
潘志强, 顾行发, 刘国栋, 等. 基于探元直方图匹配的CBERS-01星CCD数据相对辐射校正方法[J]. 武汉大学学报·信息科学版, 2005,30(10):925-927.
[
|
| [13] |
王灵丽, 白杨, 潘征, 等. 视频卫星在轨相对辐射定标方法[J]. 红外与激光工程, 2018,47(8):268-273.
[
|
| [14] |
|
| [15] |
|
| [16] |
李晶, 赵建科, 昌明, 等. 复合面阵CCD摄影相机的实验室辐射定标[J]. 光学精密工程, 2017,25(1):73-83.
[
|
| [17] |
段依妮, 张立福, 吴太夏, 等. 遥感影像相对辐射校正方法及适用性研究[J]. 遥感学报, 2014,18(3):597-617.
[
|
| [18] |
|
| [19] |
黄红莲, 易维宁, 乔延利, 等. “天绘一号”卫星在轨辐射定标方法[J]. 遥感学报, 2012,16(z1):22-27.
[
|
| [20] |
雷学武, 吴君丽, 刘俊荣. CBERS-1 CCD星上定标数据在辐射校正中的应用[J]. 国土资源遥感, 2003,15(3):63-66.
[
|
| [21] |
曾湧, 张宇烽, 徐建艳, 等. 中巴资源一号卫星02星CCD相机实验室辐射定标算法分析[J]. 航天返回与遥感, 2005,26(2):41-45.
[
|
| [22] |
范斌, 陈旭, 李碧岑, 等. “高分五号”卫星光学遥感载荷的技术创新[J]. 红外与激光工程, 2017,46(1):0102002.
[
|
| [23] |
|
| [24] |
李德仁, 李熙. 论夜光遥感数据挖掘[J]. 测绘学报, 2015,44(6):591-601.
[
|
| [25] |
|
| [26] |
张炳先, 李岩, 何红艳. 基于在轨分类统计的热红外影像辐射校正方法[J]. 国土资源遥感, 2016,28(4):24-29.
[
|
| [27] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}