
Journal of Geo-information Science >
Detection of Tilted Aerial Photography Right-Angled Image Control Points Target based on LSD Algorithm
Received date: 2020-06-08
Request revised date: 2020-09-26
Online published: 2021-05-25
Supported by
Natural Science Foundation of China(41404008)
Natural Science Foundation of Fujian Province(2020J01834)
Copyright
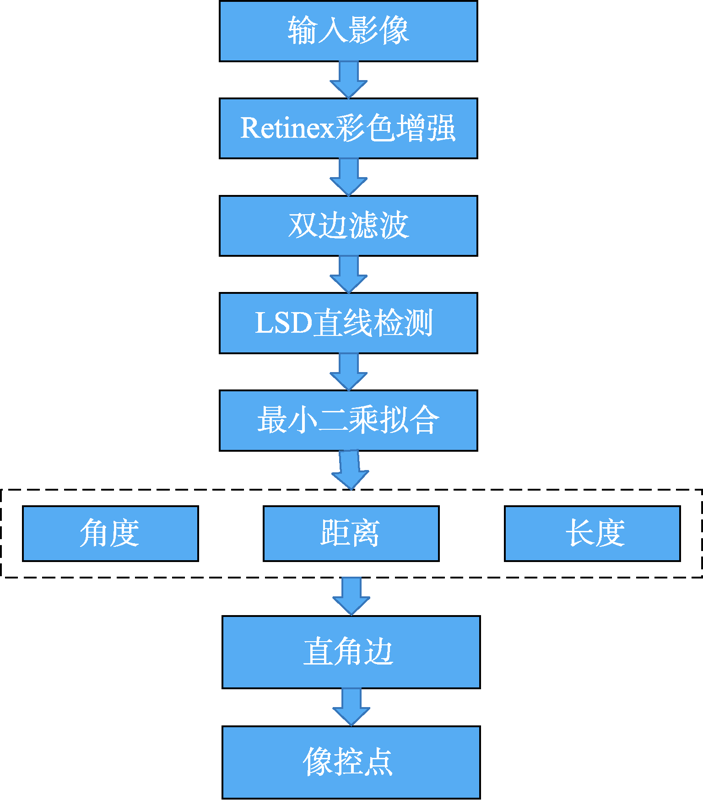
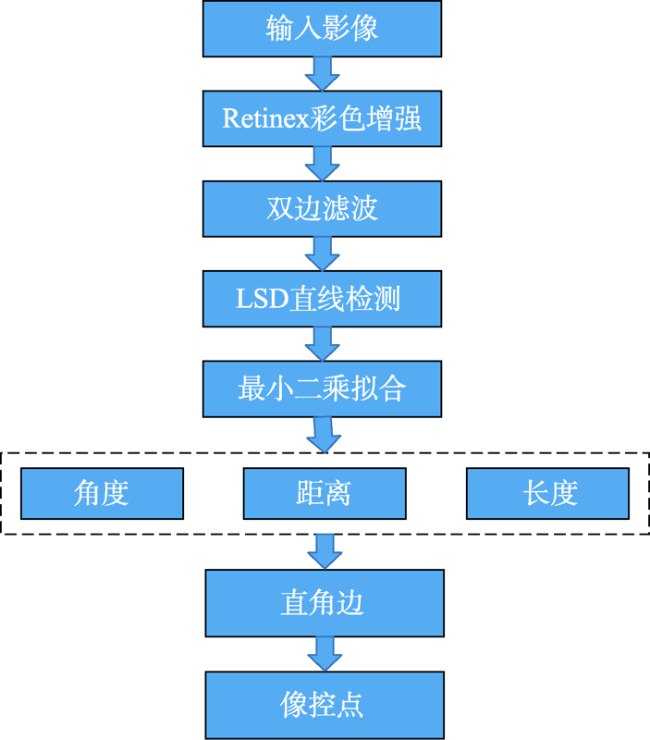
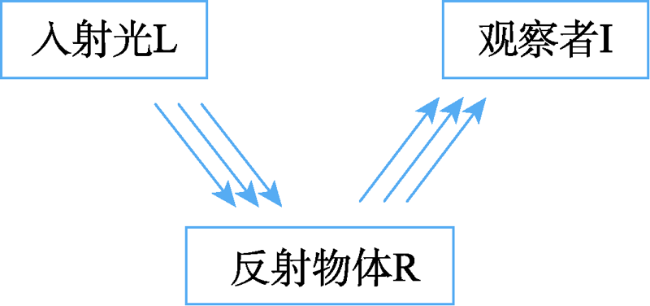
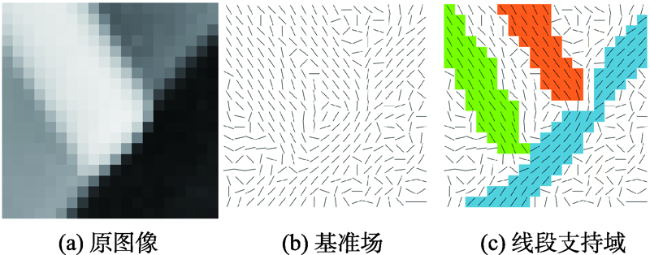
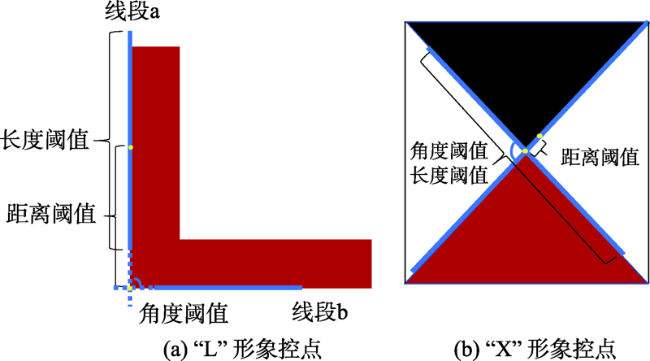
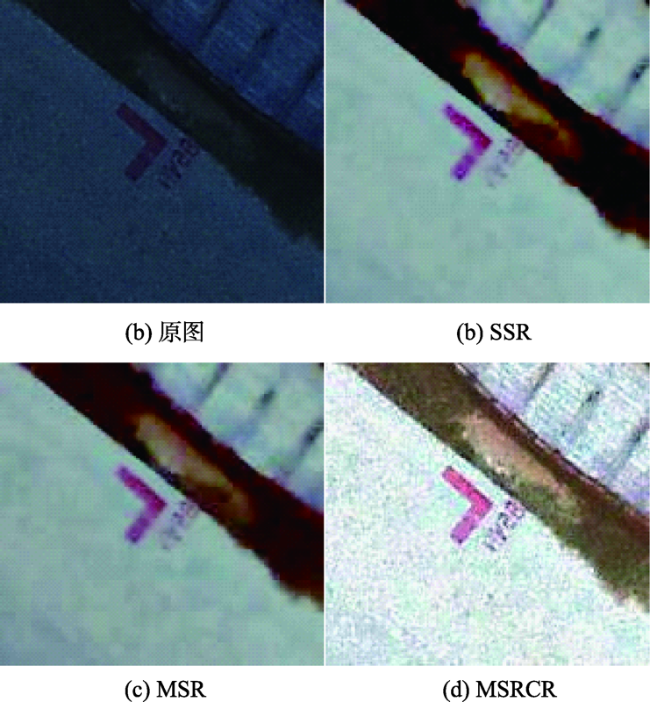
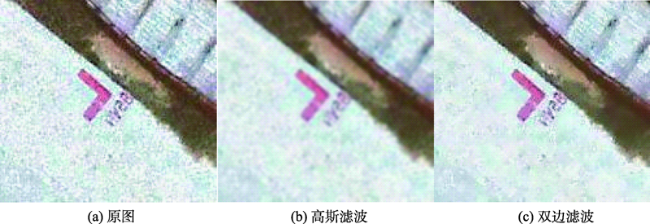
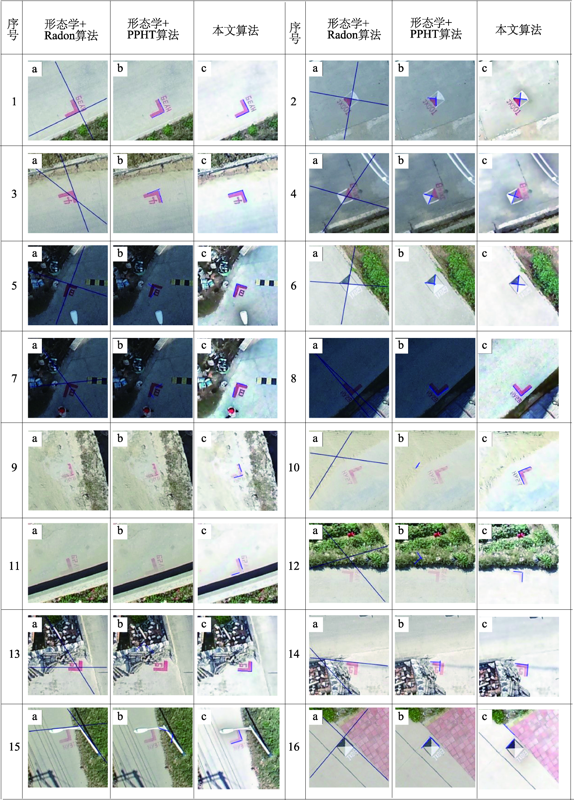
Aiming at the problems of low accuracy and large error in artificial prick points during the internal work's precise correction of the aerial triangulation data during aerial photogrammetry, we propose a method in this paper for detecting the right-angled edge control points based on the LSD algorithm. First, the image is bilateral filtered to remove noise while preserving edge information and image color information enhanced by Retinex algorithm. Then, the right-angled edges of the image control point are extracted by LSD line detection, and the outermost right-angled edge is filtered by the angle, distance, and length information. Finally, the right-angled image control points are obtained through the intersection. We tested our method using 80 images of "L" image control points and 69 images of "X" image control points taken by Dajiang UAV. Results show that this method can get accurate pixel coordinates of image control points, and maintain a high accuracy in cases with complex background and target distortion. The overall image control point extraction accuracy rate was 93.75%, and the image control point positioning accuracy reached 2.3 pixels, which significantly overcame the artificial puncture points. Compared with Radon and PPHT algorithms, the accuracy of the image control point group detection is significantly improved in our results, which indicates a higher detection accuracy with less influence from the shooting angle.
XU Chengquan , LIU Qingwei . Detection of Tilted Aerial Photography Right-Angled Image Control Points Target based on LSD Algorithm[J]. Journal of Geo-information Science, 2021 , 23(3) : 505 -513 . DOI: 10.12082/dqxxkx.2021.200292
| [1] |
张祖勋, 张剑清. 数字摄影测量学[M]. 武汉: 武汉大学出版社, 2012.
[
|
| [2] |
杨国东, 王民水. 倾斜摄影测量技术应用及展望[J]. 测绘与空间地理信息, 2016,39(1):13-15,18.
[
|
| [3] |
张祖勋, 张剑清. 城市建模的途径与关键技术[J]. 世界科技研究与发展, 2003,25(3):23-29.
[
|
| [4] |
郭斯羽, 卢建刚, 孔亚广. 一种基于Hough变换的直角角点检测算法[J]. 电子测量与仪器学报, 2008,22(1):43-47.
[
|
| [5] |
张见双, 张红民, 罗永涛, 等. 一种改进的Harris角点检测的图像配准方法[J]. 激光与红外, 2017,47(2):230-233.
[
|
| [6] |
吴一全, 王凯. 基于SUSAN算子和角点判别因子的目标边缘检测[J]. 中国科学院大学学报, 2016,33(1):128-134.
[
|
| [7] |
洪磊, 嵇保健, 洪峰. 一种基于亚像素角点的SIFT立体匹配算法研究[J]. 计算机技术与发展, 2016,26(1):48-52.
[
|
| [8] |
|
| [9] |
|
| [10] |
刘相湖, 王涛, 张小哲. 对Freeman链码分析的角点检测算法[J]. 计算机系统应用, 2018,27(4):202-208.
[
|
| [11] |
|
| [12] |
|
| [13] |
张小洪, 雷明, 杨丹. 基于多尺度曲率乘积的鲁棒图像角点检测[J]. 中国图象图形学报, 2007,12(7):1270-1275.
[
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}