
Journal of Geo-information Science >
Building BIM Modeling based on Multi-source Laser Point Cloud Fusion
Received date: 2020-07-17
Request revised date: 2020-11-06
Online published: 2021-07-25
Supported by
National Natural Science Foundation of China(41771491)
National Natural Science Foundation of China(41701597)
National Natural Science Foundation of China(U1810203)
China Postdoctoral Science Foundation Project(2018M642746)
Copyright
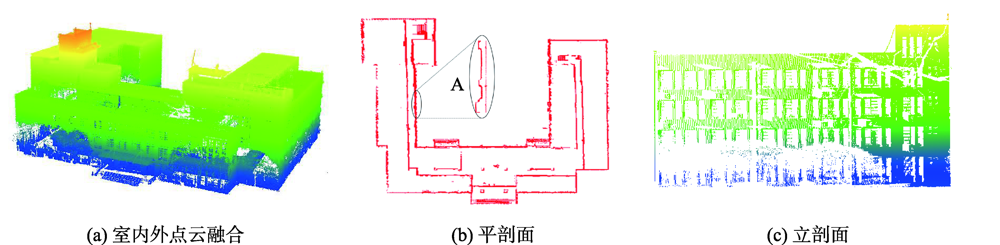
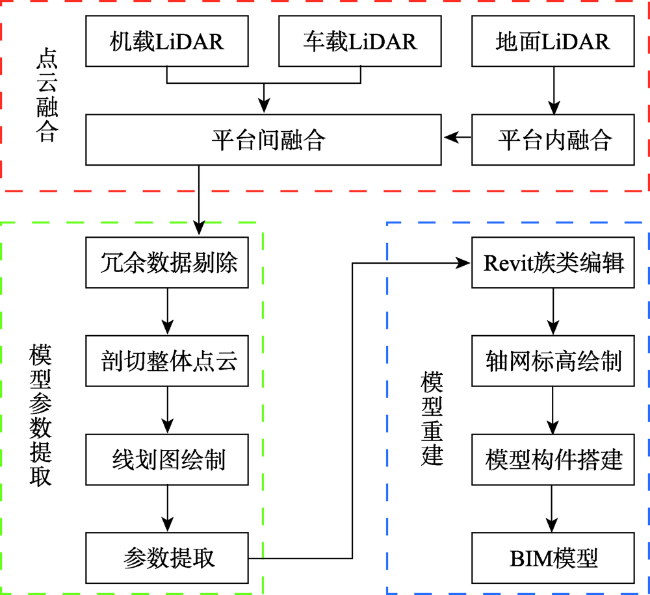
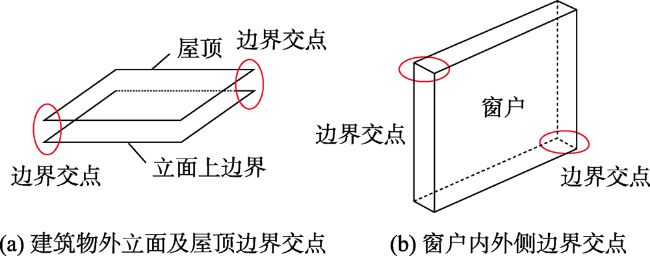
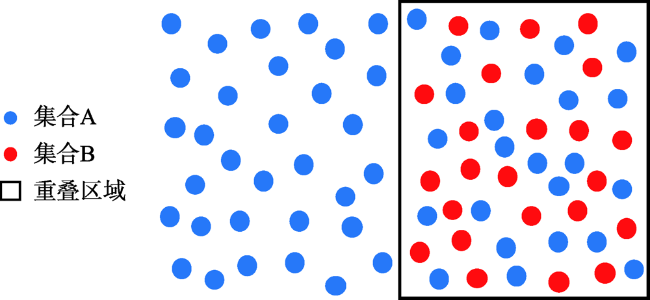
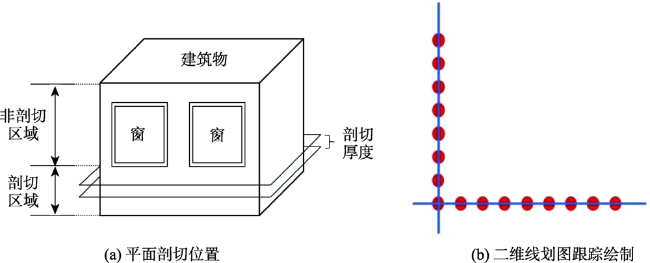
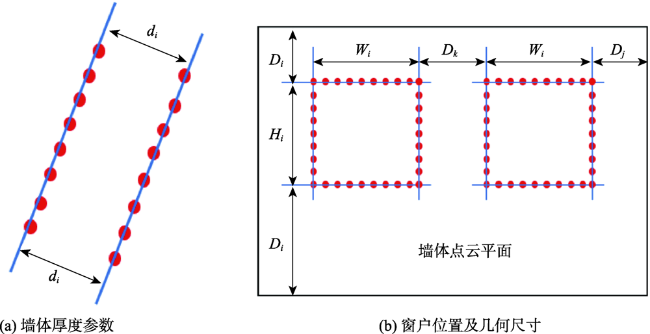
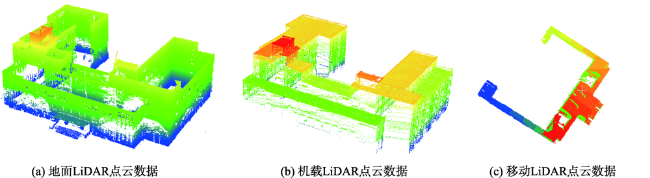
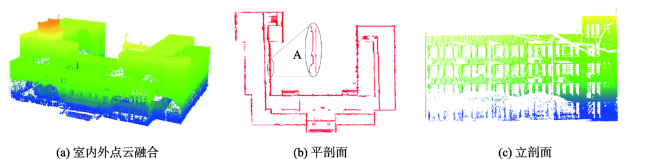
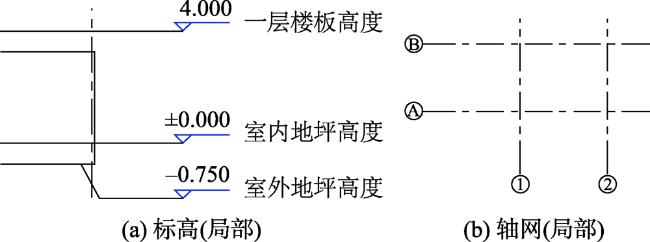
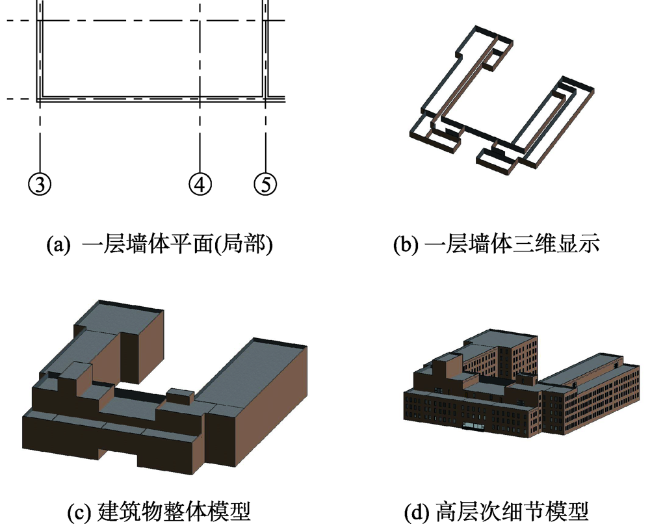
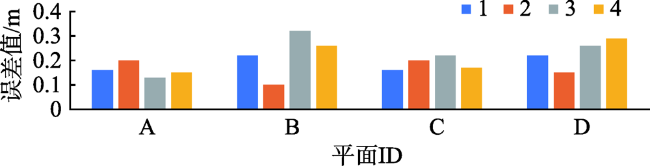
The wall, window, and other unit components are important parts of the building. It is of great significance to extract their geometric parameters and location information to express the overall model of the building. In view of the fact that a single point cloud data source cannot obtain the geometric parameters and location information of building unit components, but can fully and effectively express the problem of indoor and outdoor model reconstruction, this paper proposes a set of BIM model reconstruction technology that integrates indoor and outdoor multi-source point cloud data. In order to verify the effectiveness of this method, the teaching building of the School of Surveying and Land Information Engineering of Henan Polytechnic University was selected as the experimental area, and the data collection time of indoor and outdoor was May 2019. On the basis of preprocessing the airborne, vehicle-borne, and terrestrial laser scanner point cloud data in the experimental area, the conjugate feature points of each point set were selected respectively, and the high-precision terrestrial laser scanner point cloud was taken as the reference to fuse airborne and vehicle-borne point clouds with terrestrial laser scanner point cloud, so as to realize coordinate transformation and reduce the fusion accuracy by iteration. In order to improve the accuracy and processing efficiency of model reconstruction in the later stage, redundant data in overlapping areas were eliminated by means of minimum space distance between point clouds. The overall plane and elevation of the building were dissected, the profile was tracked in CAD to draw two-dimensional line drawings, the two-dimensional line drawings were imported into Revit software to draw axis network and elevation, and the extracted wall geometric parameters were used to edit wall family types for BIM model reconstruction. As for the facade window units, according to the extracted geometric parameters, the types were counted and the window family was edited, and they were classified into regular and irregular. Regular window units were found out by the repeatability law and position control parameters of each type, and irregular window units were placed one by one. The two were combined to optimize the BIM model. In order to verify the accuracy of model reconstruction, the representative facade of the building was selected. Taking the artificial measured facade side length as a reference, the corresponding facade side length and the model side length extracted from the point cloud data were compared and analyzed. The errors were concentrated between 0.0 and 0.2 m, with more than 0.2 m errors, but most of them were below 0.3 m. Experimental results show that the method is accurate.
LIU Yakun , LIU Huiyun , LI Yongqiang , ZHAO Shangbin , YANG Yalun . Building BIM Modeling based on Multi-source Laser Point Cloud Fusion[J]. Journal of Geo-information Science, 2021 , 23(5) : 763 -772 . DOI: 10.12082/dqxxkx.2021.200378
表2 外立面各站点融合精度对比分析Tab. 2 Comparative analysis of the fusion accuracy of each site on the facade |
| 站点 | 手动 融合/m | 多站点 调整/m | 三次手动 融合平均值/m |
|---|---|---|---|
| ScanPos1-ScanPos2 | 0.019 | 0.010 | 0.020 |
| ScanPos2-ScanPos3 | 0.013 | 0.009 | 0.015 |
| ScanPos3-ScanPos7 | 0.023 | 0.017 | 0.021 |
| ScanPos7-ScanPos4 | 0.019 | 0.012 | 0.019 |
| ScanPos7-ScanPos5 | 0.017 | 0.015 | 0.018 |
| ScanPos5-ScanPos6 | 0.025 | 0.015 | 0.022 |
| ScanPos6-ScanPos1 | 0.016 | 0.011 | 0.015 |
表3 多平台融合精度分析Tab. 3 Multi-platform fusion accuracy analysis |
| 点集 | 融合误差 平均值/m | 最小融合 误差/m | ICP迭代 误差/m |
|---|---|---|---|
| 机载与地面LiDAR | 0.132 | 0.107 | 0.085 |
| 车载与地面LiDAR | 0.089 | 0.073 | 0.059 |
表4 建筑物代表性平面边长值对比分析Tab. 4 Comparative analysis of the representative plane side length of buildings |
| 平面ID | 边ID | 实测平面边长/m | 源数据平面边长/m | 模型平面边长/m | 误差/m | |
|---|---|---|---|---|---|---|
| A | 横向 | 1 | 19.04 | 19.34 | 19.20 | 0.16 |
| 2 | 19.00 | 19.29 | 19.20 | 0.20 | ||
| 纵向 | 3 | 12.20 | 11.81 | 12.07 | 0.13 | |
| 4 | 12.22 | 12.59 | 12.07 | 0.15 | ||
| B | 横向 | 1 | 40.03 | 39.89 | 39.81 | 0.22 |
| 2 | 40.01 | 39.96 | 39.81 | 0.10 | ||
| 纵向 | 3 | 16.48 | 16.16 | 16.80 | 0.32 | |
| 4 | 16.54 | 19.89 | 16.80 | 0.26 | ||
| C | 横向 | 1 | 7.91 | 7.92 | 7.75 | 0.16 |
| 2 | 7.95 | 7.66 | 7.75 | 0.20 | ||
| 纵向 | 3 | 20.78 | 20.99 | 21.00 | 0.22 | |
| 4 | 20.83 | 21.03 | 21.00 | 0.17 | ||
| D | 横向 | 1 | 32.00 | 32.26 | 32.22 | 0.22 |
| 2 | 32.07 | 32.37 | 32.22 | 0.15 | ||
| 纵向 | 3 | 20.80 | 20.55 | 20.54 | 0.26 | |
| 4 | 20.83 | 20.51 | 20.54 | 0.29 | ||
| [1] |
文学东, 陈为民, 谢洪, 等. 一种融合多源特征的建筑物三维模型重建方法[J]. 武汉大学学报·信息科学版, 2019,44(5):731-736,764.
[
|
| [2] |
吕凤华, 刘宝华, 刘玉. 基于点云数据地铁车站BIM模型构建[J]. 测绘通报, 2018(A01):22-26.
[
|
| [3] |
|
| [4] |
滕飞. 基于点云数据的结构BIM模型研究[D]. 哈尔滨:哈尔滨工程大学, 2016.
[
|
| [5] |
朱燕, 李懋廷, 李丹, 等. BIM结合三维激光扫描技术在既有建筑改造中的应用[J]. 施工技术, 2018,47(A03):19-22.
[
|
| [6] |
孟卉, 李渊, 张宇. 基BIM+理念的建筑文化遗产数字化保护探索[J]. 地理空间信息, 2019,17(3):20-23,26,9.
[
|
| [7] |
|
| [8] |
李国远, 王健, 刘秀涵, 等. 改进的自适应遗传算法支持下点云与BIM模型配准[J]. 测绘通报, 2020(2):160-162.
[
|
| [9] |
刘昊. 基于点云的古建筑信息模型(BIM)建立研究[D]. 北京:北京建筑大学, 2014.
[
|
| [10] |
王令文. 结合点云数据与BIM技术的古建筑三维重建与信息化管理[J]. 测绘通报, 2018(6):114-117,129.
[
|
| [11] |
邓林建, 程效军, 程小龙, 等. 一种基于点云数据的建筑物BIM模型重建方法[J]. 地矿测绘, 2016,32(4):14-16.
[
|
| [12] |
赵琦, 侯妙乐, 解琳琳, 等. 基于点云数据的古建筑多层级BIM构建[J]. 遗产与保护研究, 2018,3(9):72-78.
[
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
杨必胜, 董震. 点云智能研究进展与趋势[J]. 测绘学报, 2019,48(12):1575-1585.
[
|
| [17] |
李永强, 刘会云, 曹鸿, 等. 基于空-地多源数据融合的建筑物精细建模研究[J]. 测绘工程, 2015,24(8):1-4,10.
[
|
| [18] |
|
| [19] |
王岩, 刘茂华, 由迎春, 等. 三维激光点云数据在建筑物BIM构建中的研究与应用[J]. 测绘通报, 2016(S2):224-226.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}