
Journal of Geo-information Science >
An Extraction Method of Rural Mechanically Cultivated Road Under Dynamic Weight Constraint
Received date: 2020-11-23
Request revised date: 2021-01-26
Online published: 2021-07-25
Supported by
National Natural Science Foundation of China(42071428)
National Natural Science Foundation of China(42071343)
Liaoning Provincial Department of Education Project Services Local Projects(LJ2019FL008)
Key Laboratory of Surveying and Mapping Science and Geospatial Information Technology of Ministry of Natural Resources(2020-3-5)
Copyright
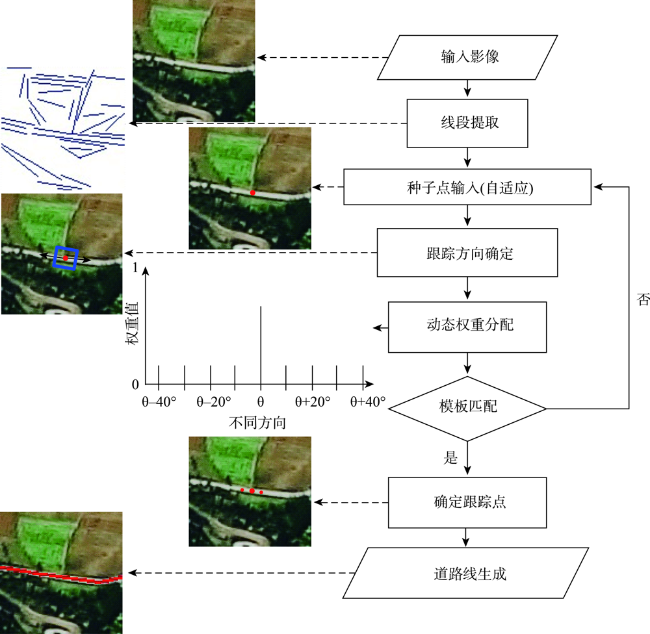
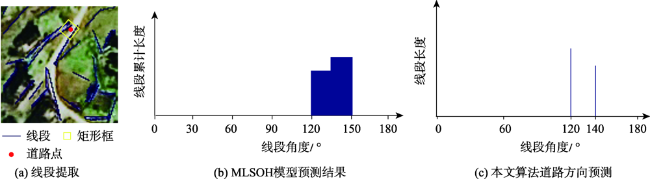
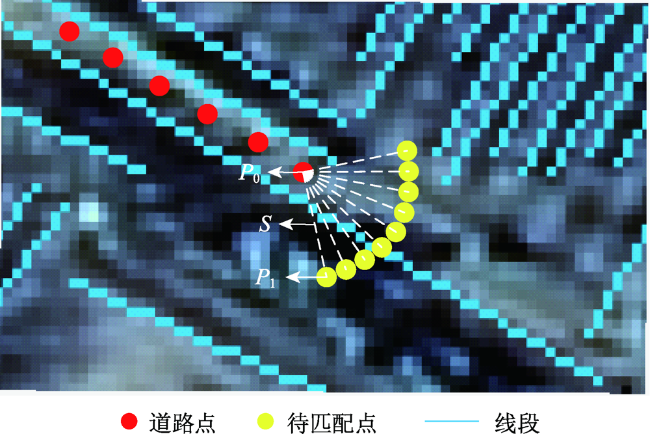
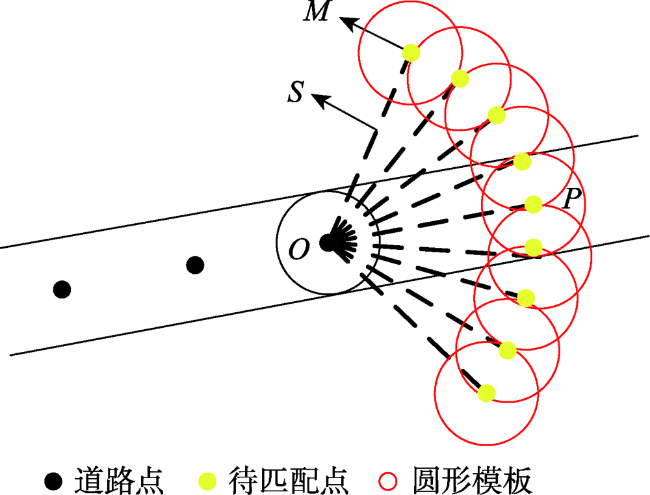
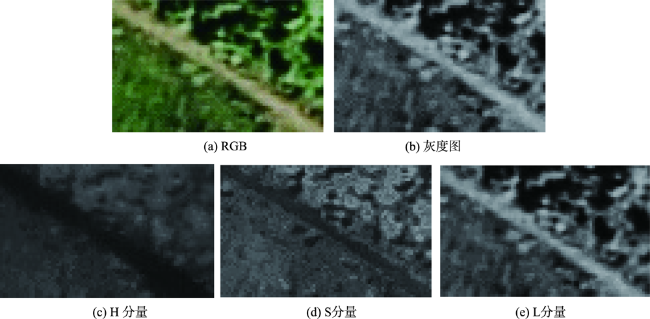
The agricultural machinery field work has developed rapidly. There is an urgent need for more accurate Mechanically Cultivated Road (MCR) network data in agricultural production scheduling. Thus, it is necessary to obtain accurate and effective rural MCR information. However, compared with other types of roads, the narrow pavement width and the small difference between pavement material and farmland are the typical characteristics of rural MCR, which are the main factors leading to the low degree of automation in existing template matching methods. In order to solve the problems mentioned above and improve the accuracy of the MCR extraction, the solutions are proposed as follows: Firstly, by improving the Multi-Scale Line Segment Orientation Histogram (MLSOH) model, we can not only predict the local road direction of MCR, but also reduce the probability of wrong prediction of road direction due to the interference of ridges. Secondly, the line segments of the image are extracted, which can clearly characterize the linear characteristics of MCR. The length of line segments in the local area is taken as the main factor of the dynamic weight distribution. The dynamic weight distribution is carried out for different road prediction directions, so as to solve the problem of the decrease in matching accuracy due to the narrow width of the MCR. Finally, the similarity analysis model of HSL color space is combined with the dynamic weight factor to form the HSL dynamic matching model to improve the contrast between the MCR and the farmland, so as to increase the accuracy of the MCR extraction. In this paper, in order to verify the effectiveness of the proposed algorithm, three high-resolution remote sensing images of different regions and data types are acquired. Two GF-2 images, with a spatial resolution of 0.8 m, covered areas in Tongliao City, Inner Mongolia, and areas in Enshi City, Hubei Province, respectively. One Geo-Eye image, with a spatial resolution of 0.5 m, covered the town of Hobart, Australia. Through qualitative and quantitative analysis of the proposed and comparison algorithms, the conclusions are as follows: the road extraction integrity, accuracy, and quality of the proposed algorithm are all above 95 %. The proposed algorithm has the advantage of high automation while ensuring the extraction accuracy of MCR. It can also be extended to other rural roads.
DAI Jiguang , WANG Xiaotong , ZHI Xinyu , MA Rongchen , ZHANG Yilei . An Extraction Method of Rural Mechanically Cultivated Road Under Dynamic Weight Constraint[J]. Journal of Geo-information Science, 2021 , 23(5) : 773 -784 . DOI: 10.12082/dqxxkx.2021.200709
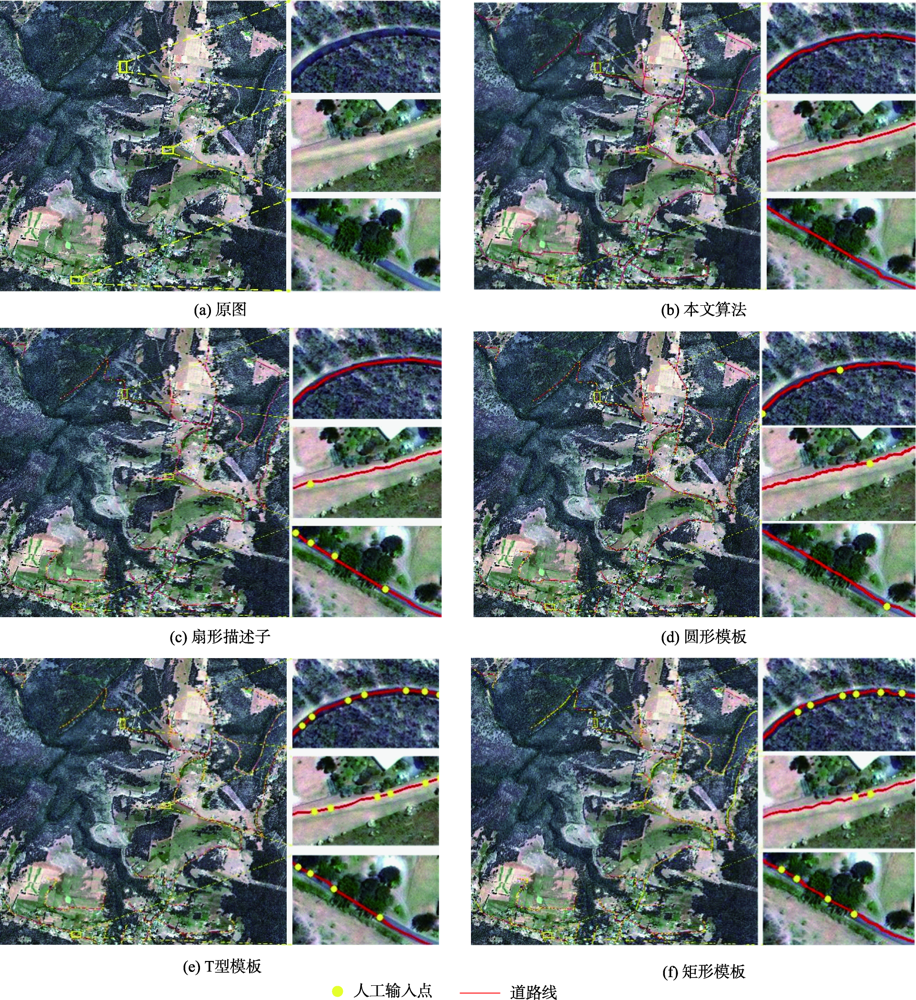
表1 不同道路提取方法的精度对比Tab. 1 The accuracy comparison of different road extraction algorithms |
| 不同实验 | 评价参数 | |||||
|---|---|---|---|---|---|---|
| 完整度/% | 正确率/% | 提取质量/% | 种子点数/个 | 时间/s | ||
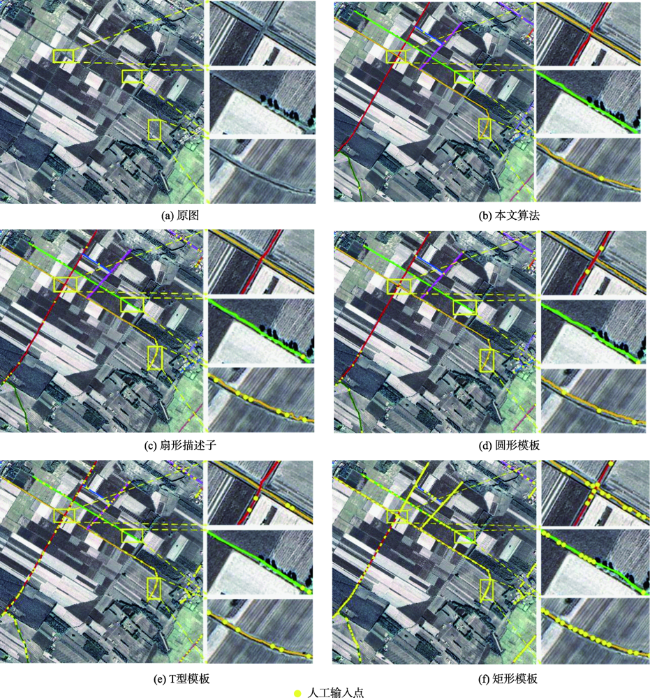
| 实验1 | 论文方法 | 98.6 | 99.5 | 97.5 | 14 | 44 |
| 扇形描述子 | 98.3 | 99.4 | 97.1 | 52 | 187 | |
| 圆形模板 | 98.1 | 98.8 | 97.1 | 42 | 178 | |
| T型模板 | 97.3 | 98.2 | 96.7 | 176 | 866 | |
| 矩形模板 | 98.7 | 96.6 | 93.7 | 422 | 1478 | |
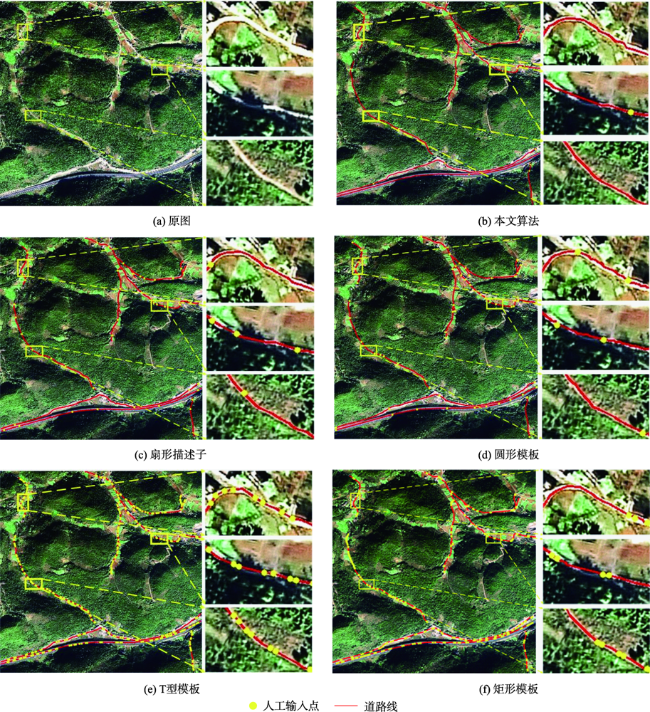
| 实验2 | 论文方法 | 99.6 | 98.9 | 97.2 | 21 | 74 |
| 扇形描述子 | 96.7 | 97.7 | 94.7 | 36 | 153 | |
| 圆形模板 | 97.4 | 98.5 | 96.0 | 70 | 255 | |
| T型模板 | 98.6 | 98.5 | 97.6 | 330 | 1482 | |
| 矩形模板 | 96.6 | 97.0 | 91.8 | 280 | 1088 | |
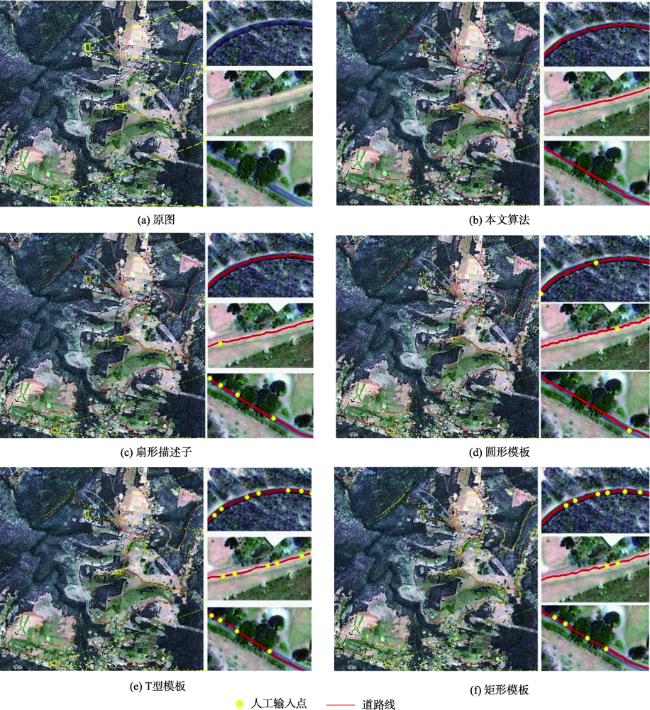
| 实验3 | 论文方法 | 98.3 | 99.4 | 97.7 | 65 | 235 |
| 扇形描述子 | 97.2 | 98.8 | 96.2 | 232 | 932 | |
| 圆形模板 | 97.1 | 99.0 | 96.2 | 292 | 1170 | |
| T型模板 | 97.2 | 96.5 | 94.1 | 646 | 2583 | |
| 矩形模板 | 96.0 | 97.9 | 94.1 | 930 | 3769 | |
| [1] |
戴激光, 王杨, 杜阳, 等. 光学遥感影像道路提取的方法综述[J]. 遥感学报, 2020,24(7):804-823.
[
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
林祥国, 张继贤, 李海涛, 等. 基于T型模板匹配半自动提取高分辨率遥感影像带状道路[J]. 武汉大学学报·信息科学版, 2009,34(3):293-296.
[
|
| [18] |
|
| [19] |
孙晨阳, 周廷刚, 陈圣波, 等. 基于矩形模板匹配的线状地物半自动提取方法研究[J]. 西南大学学报(自然科学版), 2015(7):155-160.
[
|
| [20] |
连仁包, 王卫星, 李娟. 自适应圆形模板及显著图的高分辨遥感图像道路提取[J]. 测绘学报, 2018,47(7):950-958.
[
|
| [21] |
|
| [22] |
|
| [23] |
丁磊, 张保明, 郭海涛, 等. 矢量数据辅助的高分辨率遥感影像道路自动提取[J]. 遥感学报, 2017,21(1):84-95.
[
|
| [24] |
柴文胜. 农村机耕道路建设的调查及建议[J]. 湖北农机化, 2017(4):43-44.
[
|
| [25] |
戴激光, 朱婷婷, 张依蕾, 等. 高分辨率光学卫星影像线段融合方法[J]. 测绘学报, 2020,49(4):489-498.
[
|
| [26] |
|
| [27] |
|
| [28] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}