
Journal of Geo-information Science >
UAV Networking Remote Sensing Simulation Track Planning based on Field Station
Received date: 2020-06-14
Request revised date: 2020-10-26
Online published: 2021-07-25
Supported by
National Key Research and Development Program of China(2017YFB0503003)
Copyright
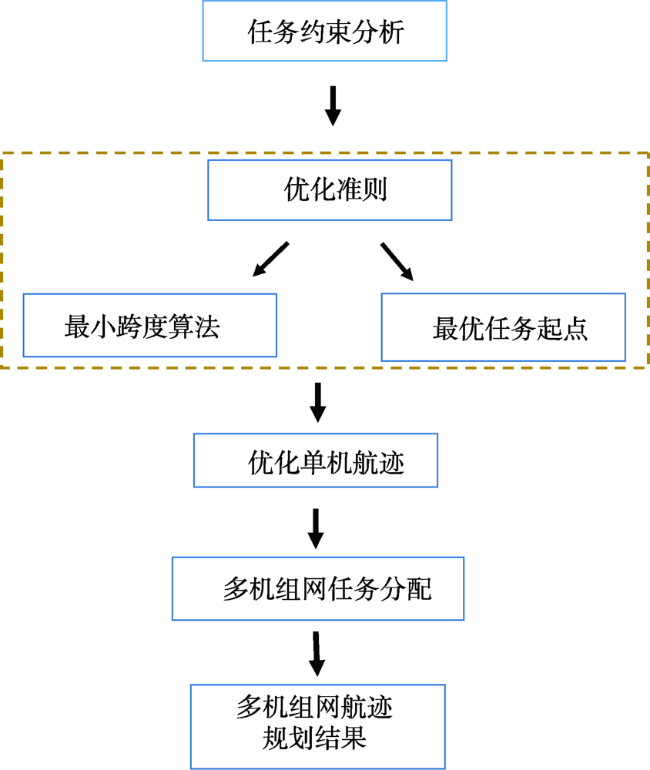
Unmanned Aerial Vehicles (UAVs) have been widely used in the field of remote sensing, due to the its flexibility and high resolution. However, the current remote sensing applications of UAVs are dominated by single UAV operations. There is still a lack of collaborative planning of UAV networking and the operation efficiency also needs to be improved. The UAV networking remote sensing can overcome these problems and provide high-frequency, multi-scale, multi-platform, and multi-load networking observations. The timely large-scale ultra-high-resolution data provided by the UAV networking remote sensing allow for large-scale ecological environment monitoring, flood disaster monitoring, and emergency monitoring of homeland security. Moreover, the UAV track planning can provide an optimal trajectory for high-frequency remote sensing observations. Thus, the research on UAV remote sensing track planning is of great significance. Given the increasing complex aerial tasks of remote sensing and increasing field station resources, a UAV networking remote sensing track planning model based on field stations is proposed in which the task assignment of the multi-unit network is carried out based on the optimized track planning of single UAV. Firstly, the optimization of track for a single UAV is carried out. The total flight of the drone is divided into effective flight and ineffective flight. By analyzing the remote sensing task constraints of a single UAV proves, we find that there is the highest efficiency when the ineffective flight is the shortest. The ineffective flight is determined by the turning flight and the flight of the UAV to and from the station. Therefore, the track optimization method to improve the efficiency of a single UAV is determined by reducing the turning distance and the distance that UAV to and from the station. The optimal flight direction is determined by the "minimum width" and the optimal mission starting point is determined by the principle that the flight of UAV to and from the station is the shortest. Secondly, based on the optimized track planning of a single UAV, a station-based task assignment algorithm for UAV networking is proposed. This algorithm takes into account the flight of each UAV to and from the station and takes full advantage of all flight. The task assignment is finally carried out by obtaining the track planning of UAV networking with the least number of UAVs. The feasibility of the model is verified by simulation examples in this study.
LI Qin , LIU Xulin , LI Ronghao , FENG Zhaohui , LI Zijin , ZHAO Hongying . UAV Networking Remote Sensing Simulation Track Planning based on Field Station[J]. Journal of Geo-information Science, 2021 , 23(5) : 948 -957 . DOI: 10.12082/dqxxkx.2021.200303
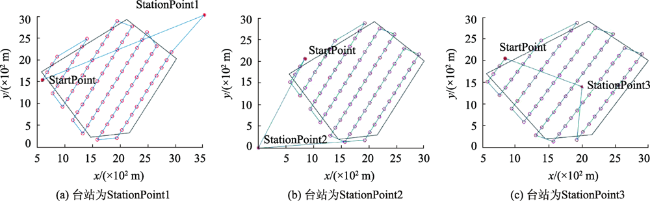
| 算法1 多机组网任务分配算法 |
|---|
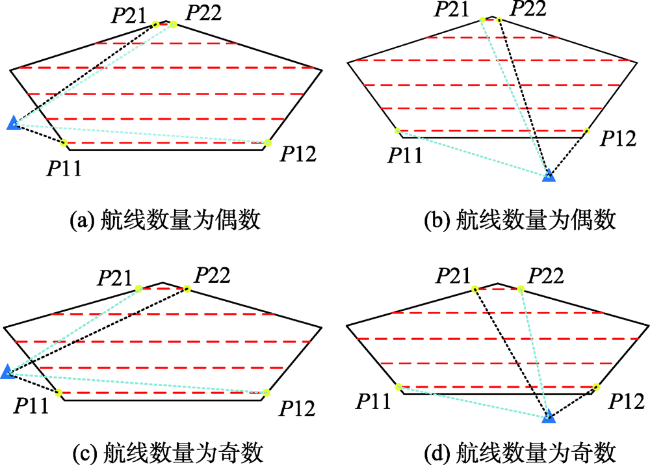
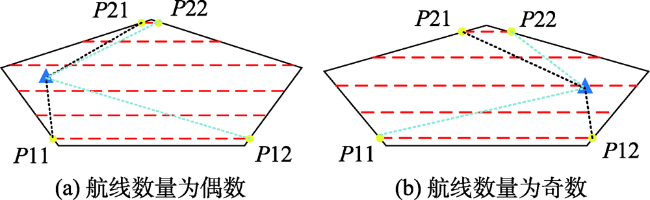
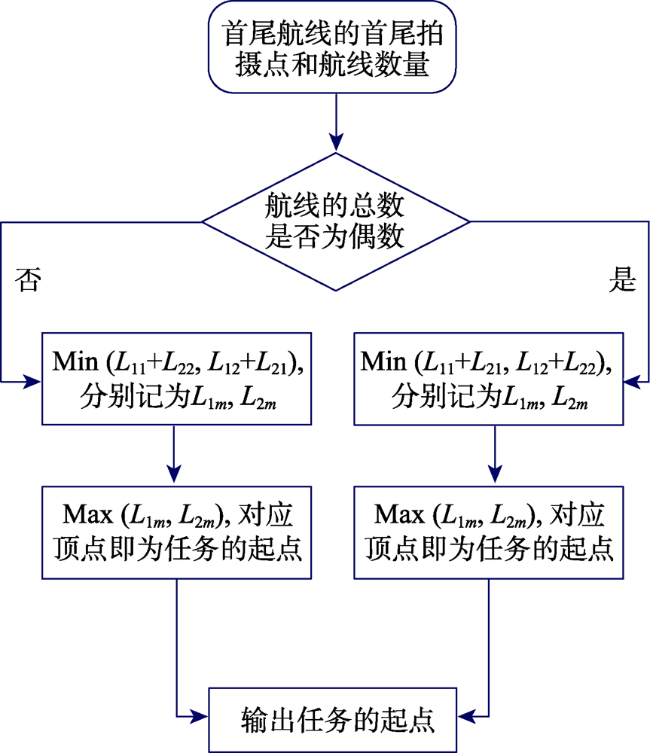
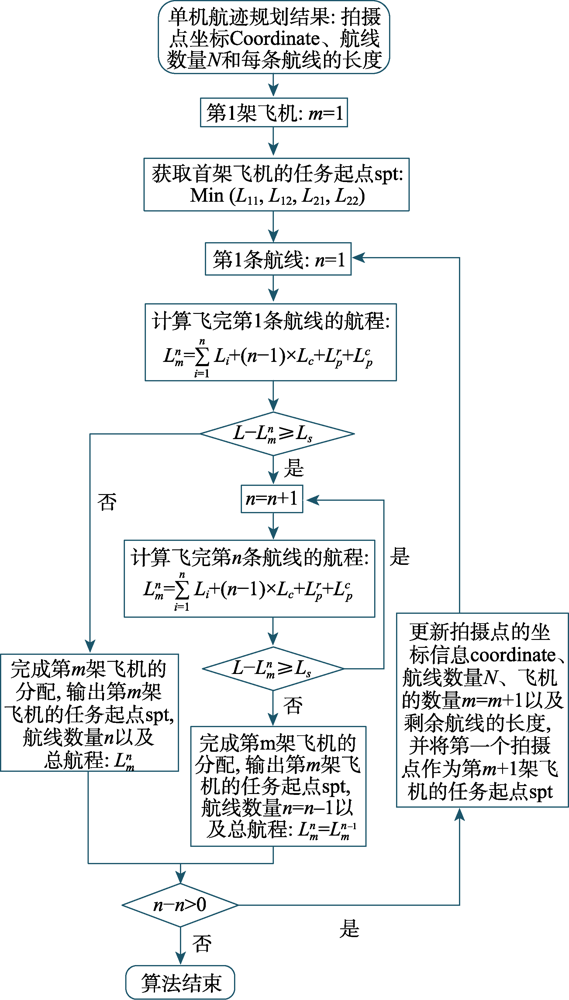
| 输入:待观测区域单机航迹规划结果,拍摄点坐标coordinate、每条航线的长度和航线的总数量N,无人机数量m=1; S1:根据单机航迹规划结果,获取首尾2条航线的首尾拍摄点分标记为P11、P12、P21和P22,分别把四个拍摄点与台站的距离记为、、和,距离采用欧氏距离进行计算,比较、、和,选择最短距离对应的拍摄点作为第1架无人机的任务起点spt; S2: n=1,计算飞完第一条航线的总航程: (15) 若,则跳转到S4,否则进行S3; S3:n=n+1,按照式(15)计算更新后总航程,若,则,n=n-1,执行S4,否则继续重复执行S3; S4:完成第m架飞机的任务分配,输出第m架飞机的任务起点spt、航线数量n以及总航程,更新剩余航线的数量:N=N-n,若,则执行S5,否则分配任务结束; S5:更新剩余观测区域拍摄点的信息coordinate、每条航线的长度以及飞机的数量m=m+1,且将第一条航线的第一个拍摄点作为第m+1架飞机的任务起点,然后执行S2; 输出:每一架飞机的拍摄点坐标coordinate、航线数量n、任务起点 以及总航程L; |
表1 不同台站的无人机航程Tab. 1 Flightofdifferentstations |
| 航程 | 台站1 | 台站2 | 台站3 | |||||
|---|---|---|---|---|---|---|---|---|
| 本文起点 | 其他起点 | 本文起点 | 其他起点 | 本文起点 | 其他起点 | |||
| /(102m) | 43.14 | 60.5 | 41.5 | 52.3 | 25.5 | 26 | ||
| L/(102m) | 205.3 | 222.7 | 202 | 213.3 | 186.4 | 187 | ||
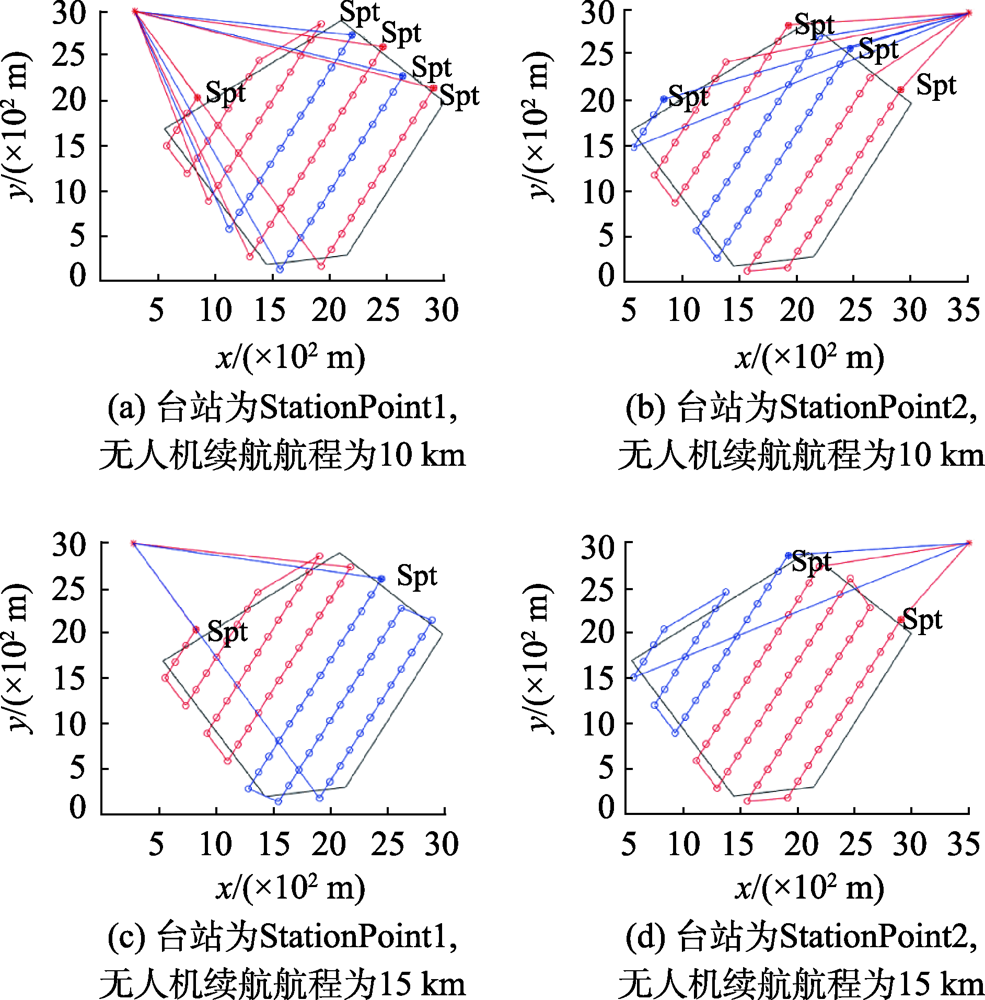
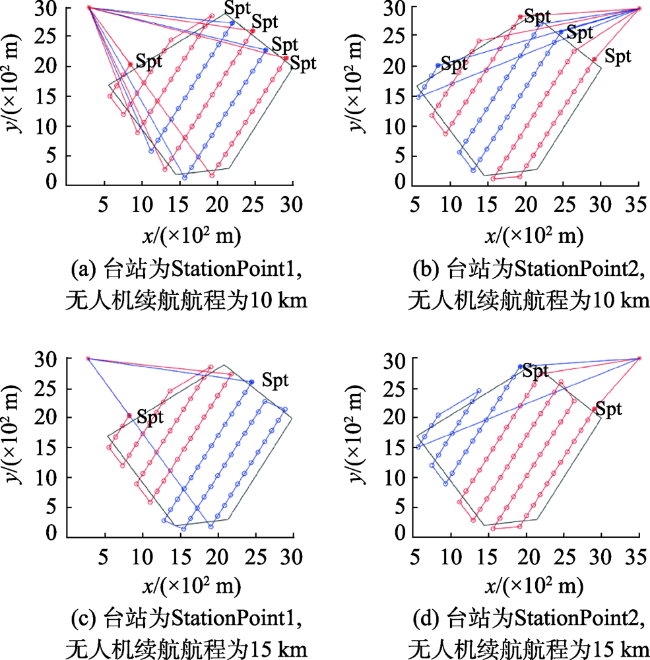
图10 基于台站的无人机组网航迹规划结果Fig. 10 Track planning results of multi-unit network on station- based |
表2 台站为StationPoint1、续航为10 km时每架无人机的航程Tab. 2 The flight of each UAV when the station is StationPoint1 and the endurance is 10 km |
| 无人机航程/km | 续航航程10 km | ||||
|---|---|---|---|---|---|
| 8.5 | 6.9 | 7.7 | 8.0 | 8.2 | |
| 往返于台站航程/km | 3.3 | 4.4 | 5.1 | 5.6 | 6.0 |
| 观测区域内航程/km | 5.2 | 2.5 | 2.6 | 2.4 | 2.2 |
表3 无人机组网航迹规划任务信息Tab. 3 Task information of UAV network track planning |
| 任务信息 | StationPoint1续航航程 | StationPoint2 续航航程 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 10 km | 15 km | 10 km | 15 km | |||||||||||
| 无人机作业航程/km | 8.5 | 6.9 | 7.7 | 8.0 | 8.2 | 11.0 | 13.0 | 7.1 | 7.8 | 7.7 | 6.7 | 13.0 | 10.0 | |
| [1] |
张光祖, 王春, 徐燕, 等. 像控点布设对无人机小范围非规则区域实景建模精度的影响[J]. 全球定位系统, 2020,45(2):60-67.
[
|
| [2] |
胡健波, 张健. 无人机遥感在生态学中的应用进展[J]. 生态学报, 2018,38(1):20-30.
[
|
| [3] |
|
| [4] |
|
| [5] |
王梦茹, 杨力, 孙聃石, 等. 低空摄影测量无人机航迹规划的设计与实现[J]. 测绘与空间地理信息, 2016,39(10):110-113.
[
|
| [6] |
王自亮, 罗德林, 吴顺祥. 凹多边形区域覆盖无人机航迹规划方法[J]. 航空兵器, 2019,26(1):95-100.
[
|
| [7] |
|
| [8] |
沈富强. 基于三维地表模型的无人机航线自动规划方法[D]. 成都:西南交通大学, 2015.
[
|
| [9] |
晏磊, 廖小罕, 周成虎, 等. 中国无人机遥感技术突破与产业发展综述[J]. 地球信息科学学报, 2019,21(4):476-495.
[
|
| [10] |
|
| [11] |
彭辉, 沈林成, 霍霄华. 多UAV协同区域覆盖搜索研究[J]. 系统仿真学报, 2007,19(11):2472-2476.
[
|
| [12] |
陈海, 何开锋, 钱炜祺. 多无人机协同覆盖路径规划[J]. 航空学报, 2016,37(3):928-935.
[
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
陈海, 王新民, 焦裕松, 李俨. 一种凸多边形区域的无人机覆盖航迹规划算法[J]. 航空学报, 2010,31(9):1802-1808.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}