
Journal of Geo-information Science >
Mapping the Spatial Distribution of Tea Plantations with 10 m Resolution in Fujian Province Using Google Earth Engine
Received date: 2020-10-08
Request revised date: 2021-01-31
Online published: 2021-09-25
Supported by
Subproject of Strategic Priority Research Program of the Chinese Academy of Sciences(XDA23100504)
Key Project of Production, Education and Research of Universities in Fujian Province(2017Y4010)
Copyright
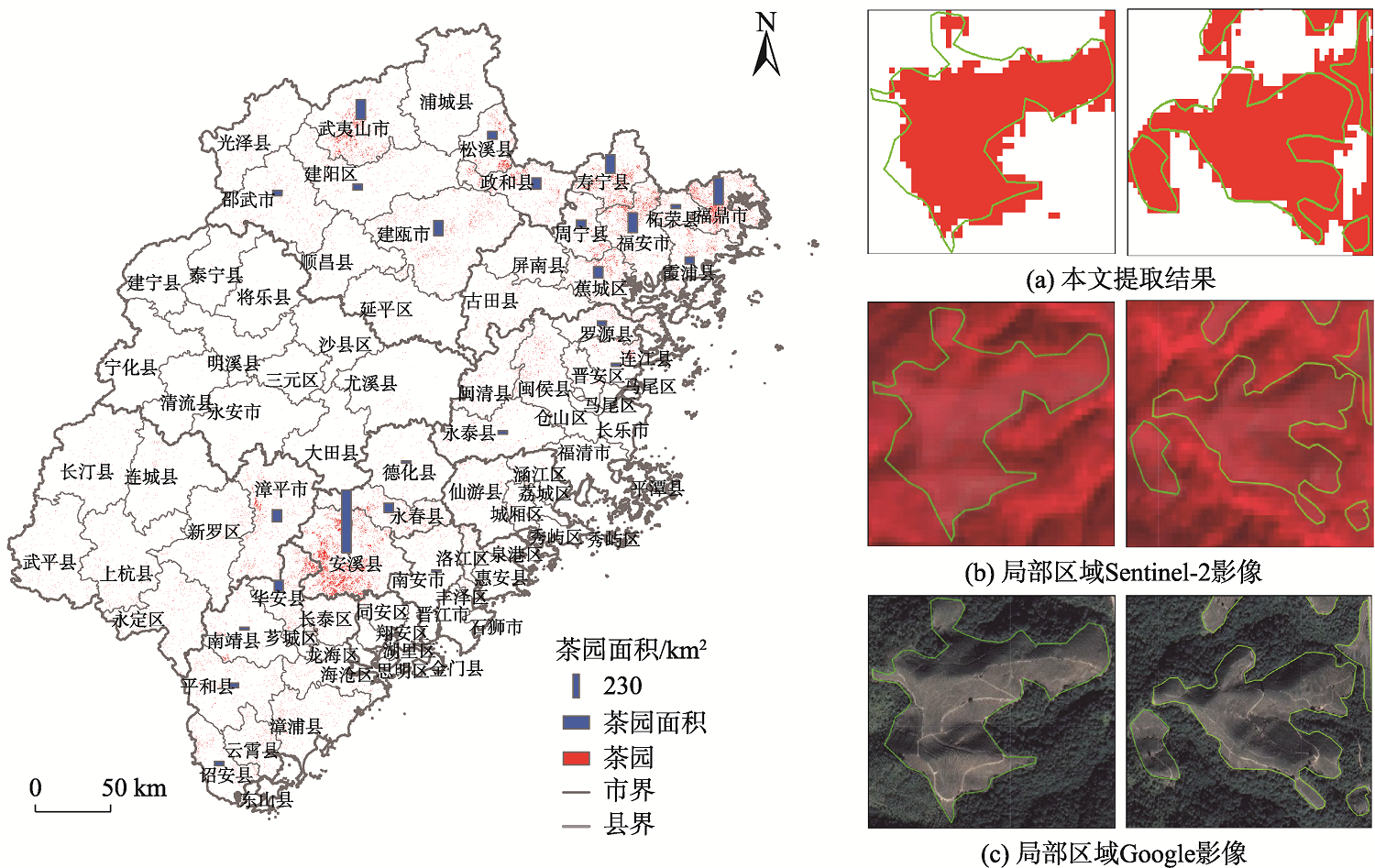
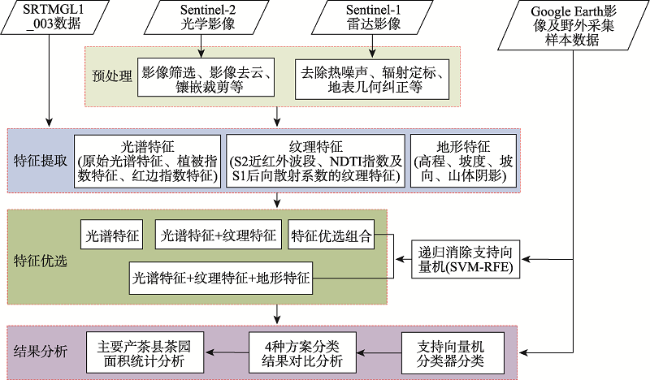
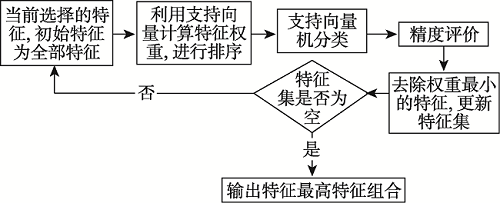
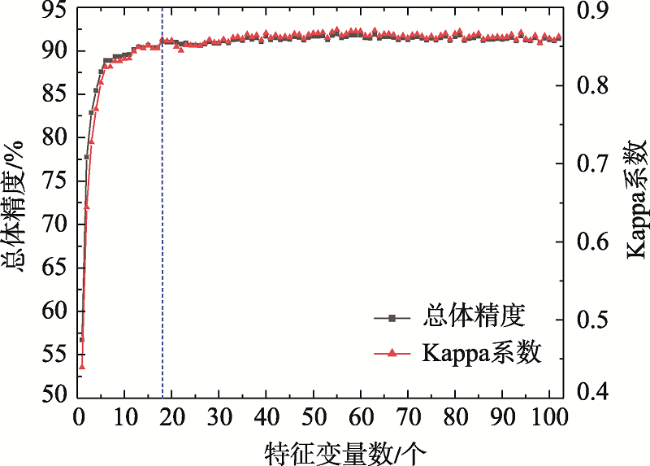
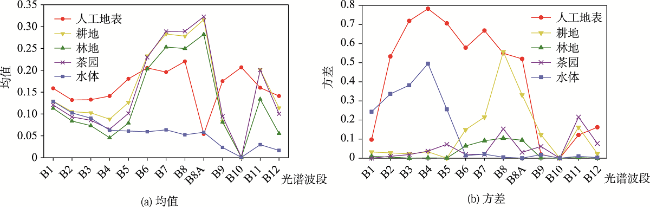
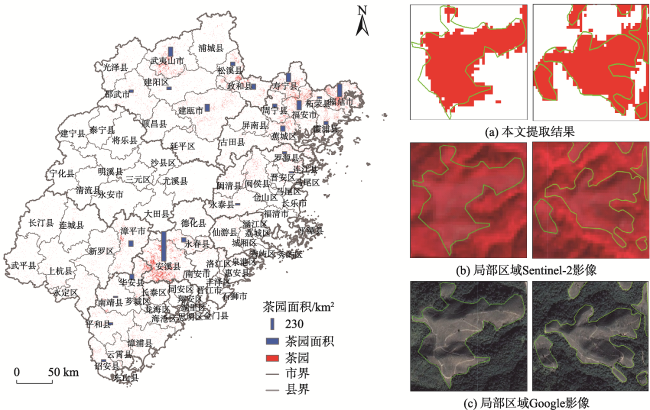
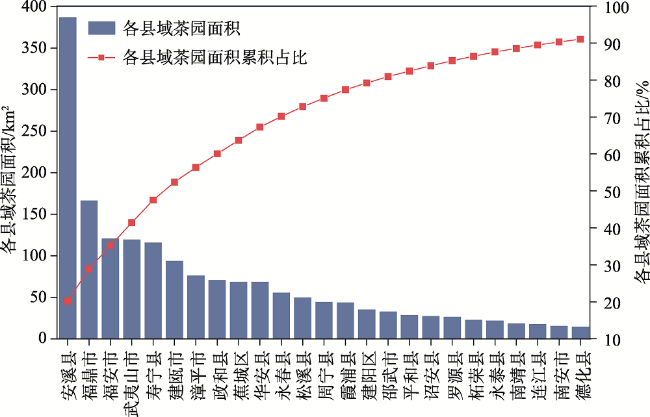
As a major tea-producing province in China, Fujian has a long history of tea culture. According to the National Bureau of Statistics in recent 10 years, the total planting area of tea in Fujian ranked the fifth among all the provinces in China. Rapid and accurate acquisition of tea plantation spatial distribution has important decision-making significance for agricultural economic development and ecological environment protection in Fujian province. However, it is difficult to obtain the spatial distribution of tea plantation in large areas accurately by traditional methods. Based on the GEE cloud platform, we firstly obtained Sentinel-1、Sentinel-2, and terrain data covering the whole province, and then extracted a total of 98 features including spectral features, texture features, and terrain features. Secondly, the Support Vector Machine-recursive Feature Elimination (SVM_RFE) was used to select features. Four groups of experiments were constructed according to different features and optimized feature subsets. Finally, the Support Vector Machine classifier (SVM) was used to extract tea plantation and obtain the spatial distribution map of tea plantation with a resolution of 10 m in Fujian province in 2019. The results show that: (1) Spectral features play an important role in tea plantation information extraction, followed by texture and terrain features. (2) It can improve the extraction accuracy by using SVM_RFE to select some features, that are useful to tea plantation extraction, from a large number of spectral, textural and topographic features. The overall accuracy is 94.65% while the kappa coefficient is 0.93. The producer accuracy and user accuracy of the tea plantation are 91.64% and 92.91%, respectively. (3) In 2019, the tea plantation area in Fujian province was 1913 km2. Tea plantations were mainly distributed in Anxi County, Fuding City, Fuan City, Wuyishan City, and Shouning County, with a total area of 910 km2, accounting for ~48% of the entire tea plantation area in Fujian province. The cloud computing technology based on GEE platform can overcome the problem of lacking computing power for large-scale tea plantation monitoring. This research can extract tea plantation distribution in Fujian province accurately, which has reference value for tea plantation and other crop extraction in hilly and mountainous areas of South China, and provides support for the government and related departments to manage tea plantation.
XIONG Haoli , ZHOU Xiaocheng , WANG Xiaoqin , CUI Yajun . Mapping the Spatial Distribution of Tea Plantations with 10 m Resolution in Fujian Province Using Google Earth Engine[J]. Journal of Geo-information Science, 2021 , 23(7) : 1325 -1337 . DOI: 10.12082/dqxxkx.2021.200583
表1 本文所用的植被指数Tab. 1 Vegetation indices used in this research |
| 植被指数简称 | 植被指数说明 | 计算公式 | 公式编号 | 参考文献 |
|---|---|---|---|---|
| NDVI | 归一化植被指数 | NDVI = (B8 - B4)/(B8 + B4) | (1) | Tucker[19] |
| NDWI | 归一化水体指数 | NDWI= (B3 - B8)/(B3 + B8) | (2) | Gao[20] |
| LSWI | 地表水分指数 | LSWI = (B8 - B11)/(B8 + B11) | (3) | Xiao等[21] |
| NDTI | 归一化差异耕作指数 | NDTI = (B11 - B12)/(B11 + B12) | (4) | Deventer等[22] |
| MNDVI | 修正型归一化植被指数 | MNDVI = (B4 - B3)/(B4 + B3) | (5) | Dihkan等[4] |
| IRECI | 新型倒红边叶绿素指数 | IRECI = (B7 - B4)/(B5/B6) | (6) | Frampton等[24] |
| MTCI | 地面叶绿素指数 | MTCI= (B6 - B5)/(B5 - B4) | (7) | Dash等[25] |
| NDVIre1 | 归一化植被指数红边1 | NDVIre1 = (B8A - B5)/(B8A + B5) | (8) | Gitelson等[26] |
| NDVIre2 | 归一化植被指数红边2 | NDVIre2 = (B8A - B6)/(B8A + B6) | (9) | 张磊等[27] |
| NDVIre3 | 归一化植被指数红边3 | NDVIre3 = (B8A - B7)/(B8A + B7) | (10) | 张磊等[27] |
| NDre1 | 归一化差异红边1 | NDre1 = (B6 - B5)/(B6 + B5) | (11) | Gitelson等[28] |
| NDre2 | 归一化差异红边2 | NDre2 = (B7 - B5)/(B7 + B5) | (12) | Merzlyak等[29] |
| CIre | 红边叶绿素指数 | CIre = B7/B5 - 1 | (13) | Gitelson等[28] |
注:B3、B4、B5、B6、B7、B8、B8A、B11和B12分别为蓝波段、绿波段、红波段、植被红边波段1、植被红边波段2、植被红边波段3、宽带近红外波段、窄带近红外波段、短波红外波段1和短波红外波段2的反射率。 |
表2 计算的GLCM纹理特征Tab. 2 GLCM texture measures |
| 波段 | 描述 | 波段 | 描述 |
|---|---|---|---|
| asm | 角二阶矩 | var | 方差 |
| corr | 相关性 | savg | 和平均 |
| idm | 逆差矩 | sent | 和熵 |
| savr | 和方差 | davr | 差方差 |
| ent | 熵 | imcorr1/imcorr2 | 相关信息测度1/2 |
| dent | 差熵 | inertia | 惯性矩 |
| diss | 差异性 | shade | 聚类萌 |
| contrast | 对比度 | prom | 聚类突 |
表3 本文涉及的特征信息汇总Tab. 3 Summary of feature information used in this research |
| 数据源 | 特征名称 | 特征说明或介绍 | 特征数目 |
|---|---|---|---|
| S2 | 原始光谱特征 | B1, B2, B3, B4, B5, B6, B7, B8, B8A, B9, B10, B11, B12 | 13 |
| 植被指数特征 | NDVI, NDWI,LSWI, NDTI, MNDVI | 5 | |
| 红边指数特征 | IRECI, MTCI, NDVIre1, NDVIre2, NDVIre3, NDre1, NDre2, CIre | 8 | |
| B8波段纹理特征 | NIR近红外波段的17个纹理特征 | 17 | |
| NDTI指数纹理特征 | NDTI指数的17个纹理特征 | 17 | |
| S1 | 雷达纹理特征 | VV和VH的17个纹理特征 | 34 |
| SRTM | 地形特征 | Elevation, Slope, Aspect, Hillshade | 4 |
| 合计 | 98 | ||
表4 实验方案信息表Tab. 4 The information table of experimental programs |
| 实验方案 | 特征组合 |
|---|---|
| 1 | 光谱特征 |
| 2 | 光谱特征+纹理特征 |
| 3 | 光谱特征+纹理特征+地形特征 |
| 4 | SVM_RFE特征优选 |
表5 不同实验方案的分类精度统计Tab. 5 The statistics of classification accuracy for different classification experiments |
| 实验方案 | OA/% | Kappa系数 | 人工地表 | 耕地 | 林地 | 茶园 | 水体 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PA/% | UA/% | PA/% | UA/% | PA/% | UA/% | PA/% | UA/% | PA/% | UA/% | |||||||
| 1 | 89.42 | 0.85 | 93.70 | 96.07 | 83.28 | 80.38 | 92.28 | 91.74 | 83.45 | 84.31 | 95.33 | 96.62 | ||||
| 2 | 93.04 | 0.90 | 94.79 | 96.11 | 87.54 | 90.20 | 95.11 | 94.01 | 90.27 | 90.12 | 96.67 | 96.03 | ||||
| 3 | 93.87 | 0.92 | 94.79 | 96.11 | 91.15 | 91.45 | 96.09 | 94.70 | 90.27 | 91.52 | 96.00 | 96.64 | ||||
| 4 | 94.65 | 0.93 | 95.62 | 96.14 | 93.11 | 92.51 | 96.19 | 95.44 | 91.64 | 92.91 | 96.67 | 96.67 | ||||
注:表中OA、PA和UA分别代表总体精度、生产者精度和用户精度。 |
表6 最高总体精度的混淆矩阵Tab. 6 Confusion matrix of highest overall accuracy classification |
| 类别 | 人工地表 | 耕地 | 林地 | 茶园 | 水体 | 总计 | 用户精度/% |
|---|---|---|---|---|---|---|---|
| 人工地表 | 349 | 8 | 2 | 4 | 0 | 363 | 96.14 |
| 耕地 | 5 | 284 | 8 | 7 | 3 | 307 | 92.51 |
| 林地 | 6 | 2 | 984 | 37 | 2 | 1031 | 95.44 |
| 茶园 | 2 | 10 | 29 | 537 | 0 | 578 | 92.91 |
| 水体 | 3 | 1 | 0 | 1 | 145 | 150 | 96.67 |
| 总计 | 365 | 305 | 1023 | 586 | 150 | 2429 | |
| 生产者精度/% | 95.62 | 93.12 | 96.19 | 91.64 | 96.67 | ||
| 总体精度(OA):94.65% Kappa系数:0.93 | |||||||
表7 不同分类方案结果的差异显著性Tab. 7 McNemar test for different classification experiments |
| 实验方案 | 方案1(光谱) | 方案2(光谱+纹理) | 方案3(光谱+纹理+地形) |
|---|---|---|---|
| 方案2(光谱+纹理) | 7.63* | ||
| 方案3(光谱+纹理+地形) | 7.30* | 0.90 | |
| 方案4(SVM_RFE特征优选) | 9.04* | 3.09* | 4.16* |
注:* 表示置信度小于0. 05。 |
| [1] |
国家统计局. 分省年度数据,2008-2017[EB/OL]. https://data.stats.gov.cn/easyquery.htm?cn=C01.
[State Statistics Bureau. Provincial annual data, 2008- 2017[EB/OL]. http://data.stats.gov.cn/easyquery.htm?cn=C01.]
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
王娜, 李强子, 杜鑫, 等. 单变量特征选择的苏北地区主要农作物遥感识别[J]. 遥感学报, 2017, 21(4):519-530.
[
|
| [8] |
|
| [9] |
|
| [10] |
马超, 杨飞, 王学成. 基于中尺度光谱和时序物候特征提取南方丘陵山区茶园[J]. 国土资源遥感, 2019, 31(1):141-148.
[
|
| [11] |
徐伟燕, 孙睿, 金志凤. 基于资源三号卫星影像的茶树种植区提取[J]. 农业工程学报, 2016, 32(z1):161-168.
[
|
| [12] |
|
| [13] |
郭交, 朱琳, 靳标. 基于Sentinel-1和Sentinel-2数据融合的农作物分类[J]. 农业机械学报, 2018, 49(4):192-198.
[
|
| [14] |
谭深, 吴炳方, 张鑫. 基于Google Earth Engine与多源遥感数据的海南水稻分类研究[J]. 地球信息科学学报, 2019, 21(6):937-947.
[
|
| [15] |
常文涛, 王浩, 宁晓刚, 等. 融合Sentinel-2红边波段和Sentinel-1雷达波段影像的扎龙湿地信息提取[J]. 湿地科学, 2020, 18(1):10-19.
[
|
| [16] |
徐晗泽宇, 刘冲, 王军邦, 等. Google Earth Engine平台支持下的赣南柑橘果园遥感提取研究[J]. 地球信息科学学报, 2018, 20(3):396-404.
[
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
方灿莹, 王琳, 徐涵秋. 不同植被红边指数在城市草地健康判别中的对比研究[J]. 地球信息科学学报, 2017, 19(10):1382-1392.
[
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
张磊, 宫兆宁, 王启为, 等. Sentinel-2影像多特征优选的黄河三角洲湿地信息提取[J]. 遥感学报, 2019, 23(2):313-326.
[
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
宋荣杰, 宁纪锋, 刘秀英, 等. 基于纹理特征和SVM的QuickBird影像苹果园提取[J]. 农业机械学报, 2017, 48(3):188-197.
[
|
| [42] |
李龙伟, 李楠, 陆灯盛. 多时相Sentinel-2影像在浙西北茶园信息提取中的应用[J]. 浙江农林大学学报, 2019, 36(5):841-848.
[
|
| [43] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}