
Journal of Geo-information Science >
Optimized Method of Indoor Road Network based on Spatial Hierarchical Cognition
Received date: 2020-11-19
Online published: 2021-11-25
Supported by
National Key Research and Development Program of China(2016YFB0502104)
Copyright
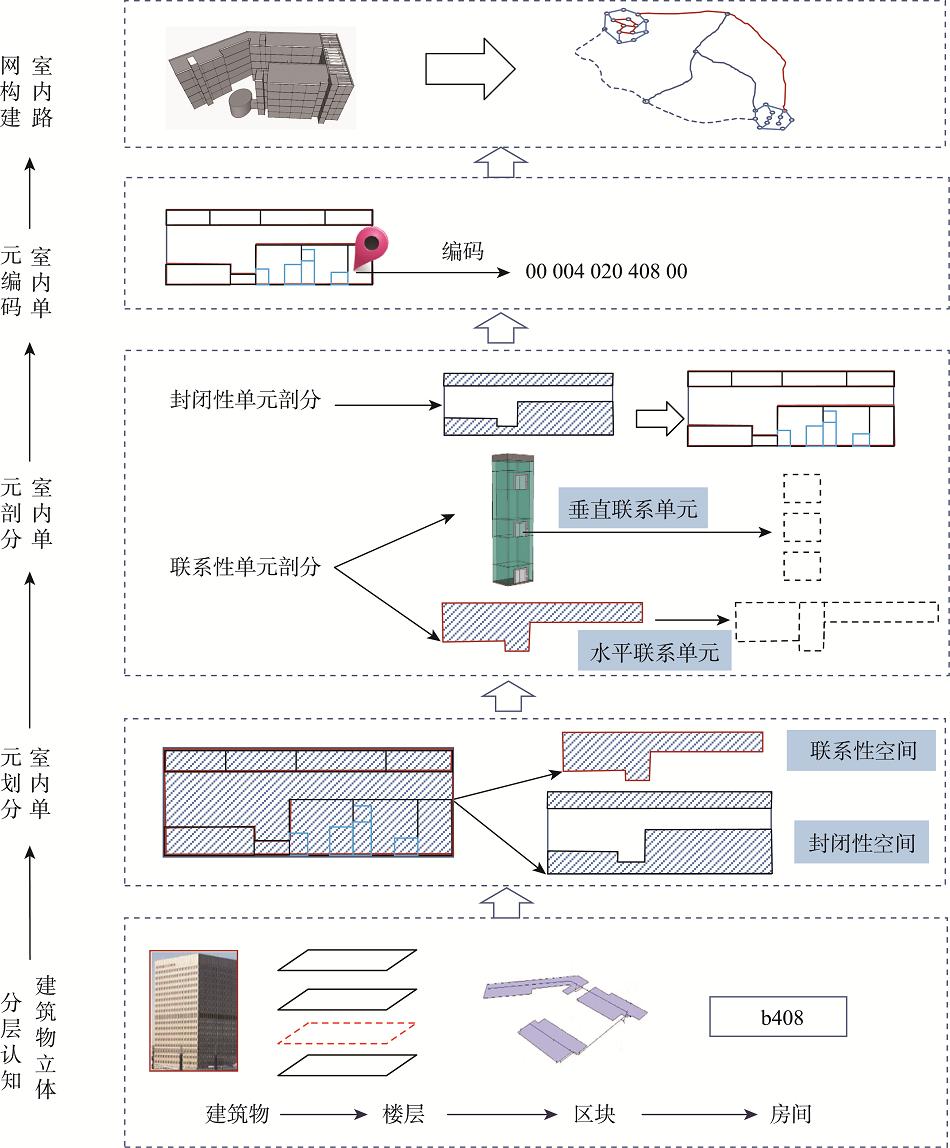
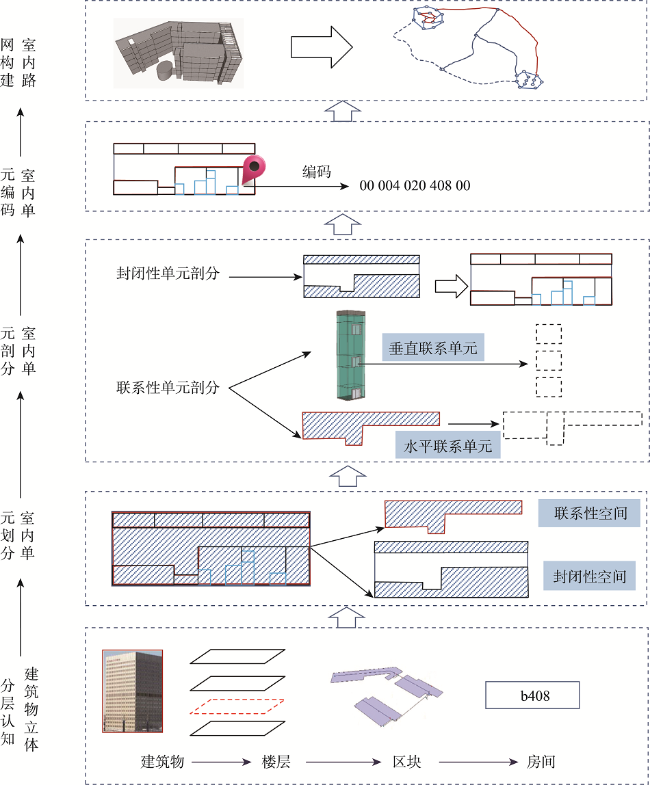
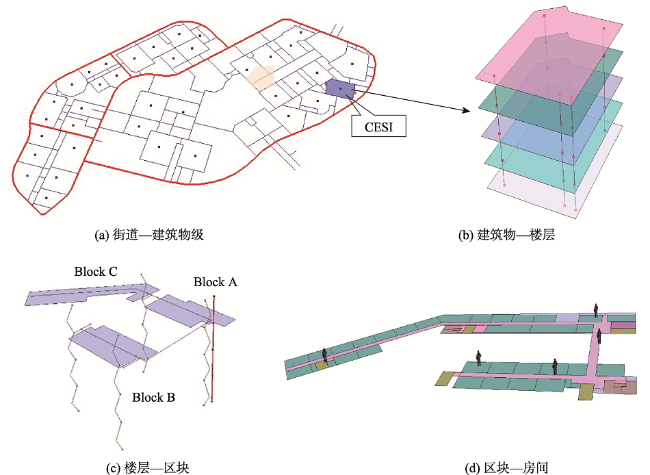
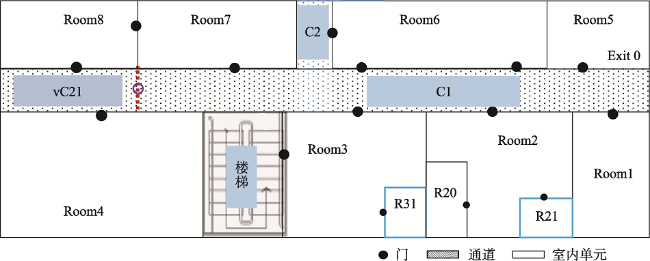
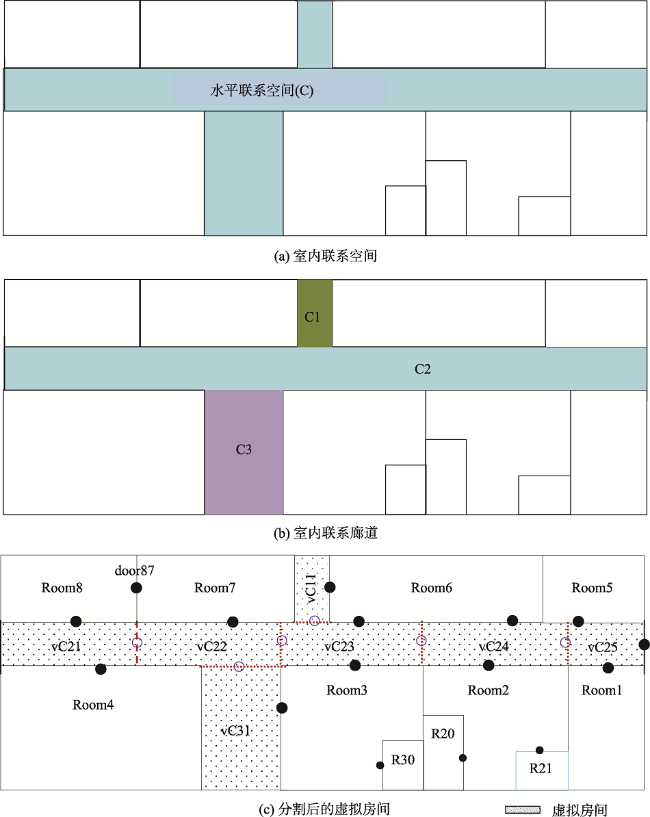
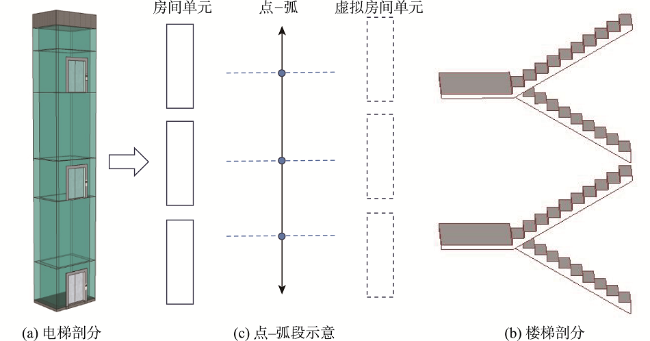
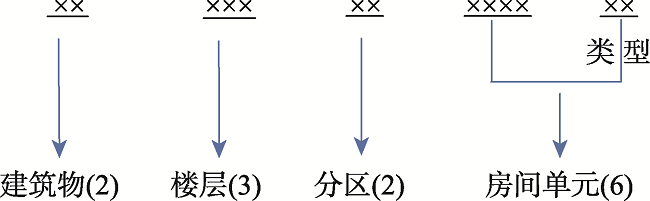
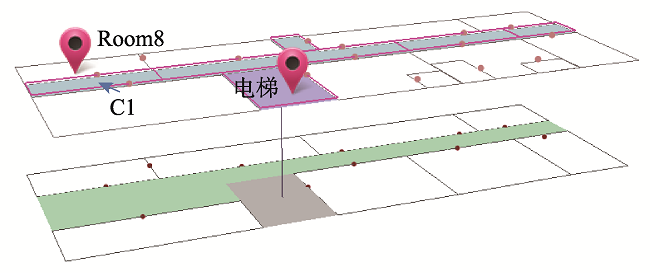
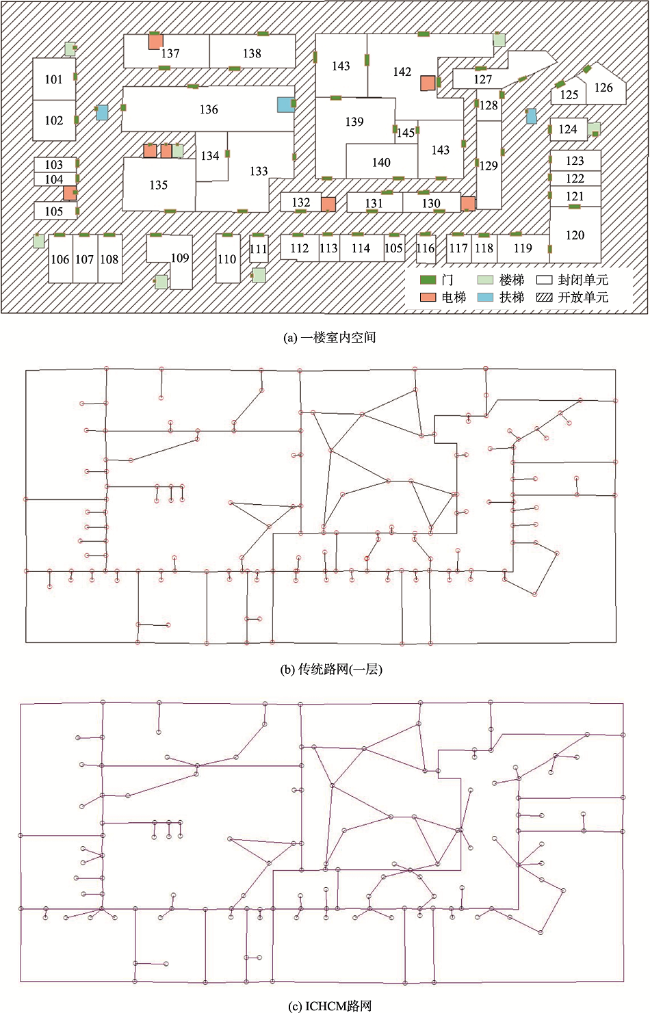
With the increase of indoor space application and the development of indoor positioning technology, the integration and application of indoor location information has become one of the hot spots in indoor GIS research. Emergency rescue and navigation for indoor space, such as large venues, has become a research hotspot of indoor GIS application. The construction of indoor network is the key technology to realize the indoor emergency navigation service. In this paper, aiming at the problem of indoor navigation routing, we proposed and constructed Indoor Cognitive Hierarchical Coding Method (ICHCM) based on indoor space perception and hierarchical cognition. The main contents are as follows: (1) Based on the law of indoor space perception and the way of hierarchical cognition, the indoor road network was simplified into four levels: street-building level, building-floor level, floor-block level, and block-room level. Thus a tree network of multi-level expression was formed; (2) In order to meet the needs of semantic analysis and path finding, the "virtual room" unit was introduced to divide the indoor closed unit and associated unit into room unit based on the analysis of the indoor unit function. The partition strategy of horizontal and vertical connection space was also provided; (3) Based on the cognitive hierarchical model of interior architecture and the results of indoor unit division, the indoor units were coded successively from high level to low level. This indoor unit encoding method is of great significance to semantic relations, spatial queries, topological relations, and path finding in indoor space. In order to verify the feasibility and effectiveness of the proposed road network construction and coding method, a commercial center was selected as study area, four levels of indoor road network were constructed. The number of nodes and arcs of every level of the network was reduced by layered and partitioned processing while the ICHCM network was effectively simplified and the efficiency of calculation was improved. The time used in path-finding was less than those of traditional network models. The same floor routing time was -55 millisecond while the cross floor routing time was -100 millisecond. The results showed that ICHCM model fits the way of the cognition of science for people. ICHCM can describe the characteristics of the network of different levels, enable the integrated path-finding of indoor space, and meet the demand of the precision and efficiency of path-finding. Results from this study provide important basis for indoor navigation.
WANG Xingfeng , LIU Junsheng . Optimized Method of Indoor Road Network based on Spatial Hierarchical Cognition[J]. Journal of Geo-information Science, 2021 , 23(9) : 1586 -1597 . DOI: 10.12082/dqxxkx.2021.200700
表2 路径结点弧段、寻径时间Tab. 2 Node Arc and computing time |
| 寻径方式 | 参与寻径的结点/个 | 参与寻径的弧段/段 | 寻径时间/ms | |
|---|---|---|---|---|
| 分层网络模型 | 同层 | 136 | 145 | 102 |
| 跨楼层 | 263 | 272 | 216 | |
| ICHCM | 同层 | 82 | 62 | 55 |
| 跨楼层 | 205 | 176 | 102 |
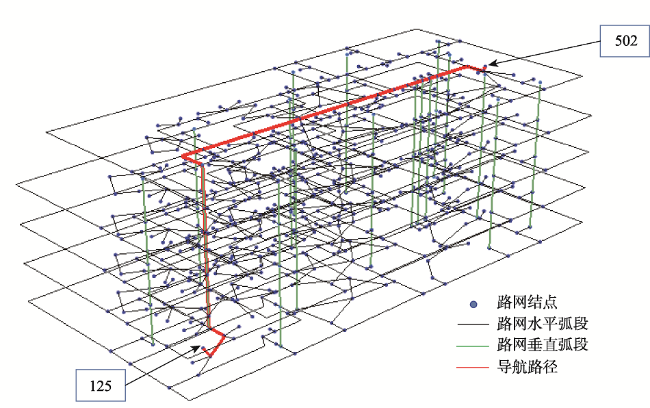
表3 125房间到502房间路网信息Tab. 3 Network from 125 to 502 |
| 路网层次 | 节点数/个 | 弧段数/段 | 说明 |
|---|---|---|---|
| Street-building | 0 | 0 | 和室外街道路网相连的出入口 |
| Building-floor | 85 | 68 | 电梯弧段、楼梯弧段、扶梯弧段 |
| Floor-block | 113 | 108 | 建筑物的第一、五层的联系空间弧段信息 |
| Block-room | 5 | 4 | 第四层A区各个房间节点、弧段起止点、交叉点等 |
| 小计 | 203 | 180 |
| [1] |
李清泉, 周宝定, 马威, 等. GIS辅助的室内定位技术研究进展[J]. 测绘学报, 2019, 48(12):1498-1506.
[
|
| [2] |
|
| [3] |
|
| [4] |
赵江洪, 董岩, 危双丰, 等. 室内导航路网提取研究进展[J]. 测绘科学, 2020, 45(12):45-54,76.
[
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
赵彬彬, 王安, 汤鑫, 等. 基于廊道空间几何特性的室内导航路网模型构建[J]. 长沙理工大学学报(自然科学版), 2019, 16(4):8-15.
[
|
| [14] |
|
| [15] |
尤承增, 彭玲, 王建辉, 等. 高精度室内地图辅助VLC与PDR融合定位[J]. 地球信息科学学报, 2019, 21(9):1402-1410.
[
|
| [16] |
|
| [17] |
|
| [18] |
熊维茜, 高平, 呙维, 等. 面向多层建筑的室内外一体化路径规划算法[J]. 测绘地理信息, 2020, 45(1):44-46,61.
[
|
| [19] |
傅梦颖, 张恒才, 王培晓, 等. 基于移动对象轨迹的室内导航网络构建方法[J]. 地球信息科学学报, 2019, 21(5):631-640.
[
|
| [20] |
|
| [21] |
王行风. 面向室内外一体化寻径的道路网络空间感知层次建模方法[J]. 测绘科学技术, 2018, 6(2):141-150.
[
|
| [22] |
王行风, 汪云甲. 一种顾及拓扑关系的室内三维模型组织和调度方法[J]. 武汉大学学报·信息科学版, 2017, 42(1):35-42.
[
|
| [23] |
唐炉亮, 刘章, 杨雪, 等. 符合认知规律的时空轨迹融合与路网生成方法[J]. 测绘学报, 2015, 44(11):1271-1276,1284.
[
|
| [24] |
[ 3D Math Primer for Graphics and Game Development[M]. Beijing: Tsinghua University Press, 2005. ]
|
| [25] |
朱金龙. 室内场景下人群疏散的若干关键技术研究[D]. 长春:吉林大学, 2016.
[
|
| [26] |
张海荣, 王行风, 闫志刚. 地理信息系统原理[M]. 徐州: 中国矿业大学出版社, 2017.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}