
Journal of Geo-information Science >
Individual Tree Recognition Algorithm of UAV Stereo Imagery Considering Three-dimensional Morphology of Tree
Received date: 2021-03-09
Request revised date: 2021-04-15
Online published: 2021-12-25
Supported by
Strategic Priority Research Program of Chinese Academy of Sciences(XDA19050501)
National Key Research and Development Program of China(2017YFB0503005)
National Natural Science Foundation of China(41971359)
National Natural Science Foundation of China(41771388)
Copyright
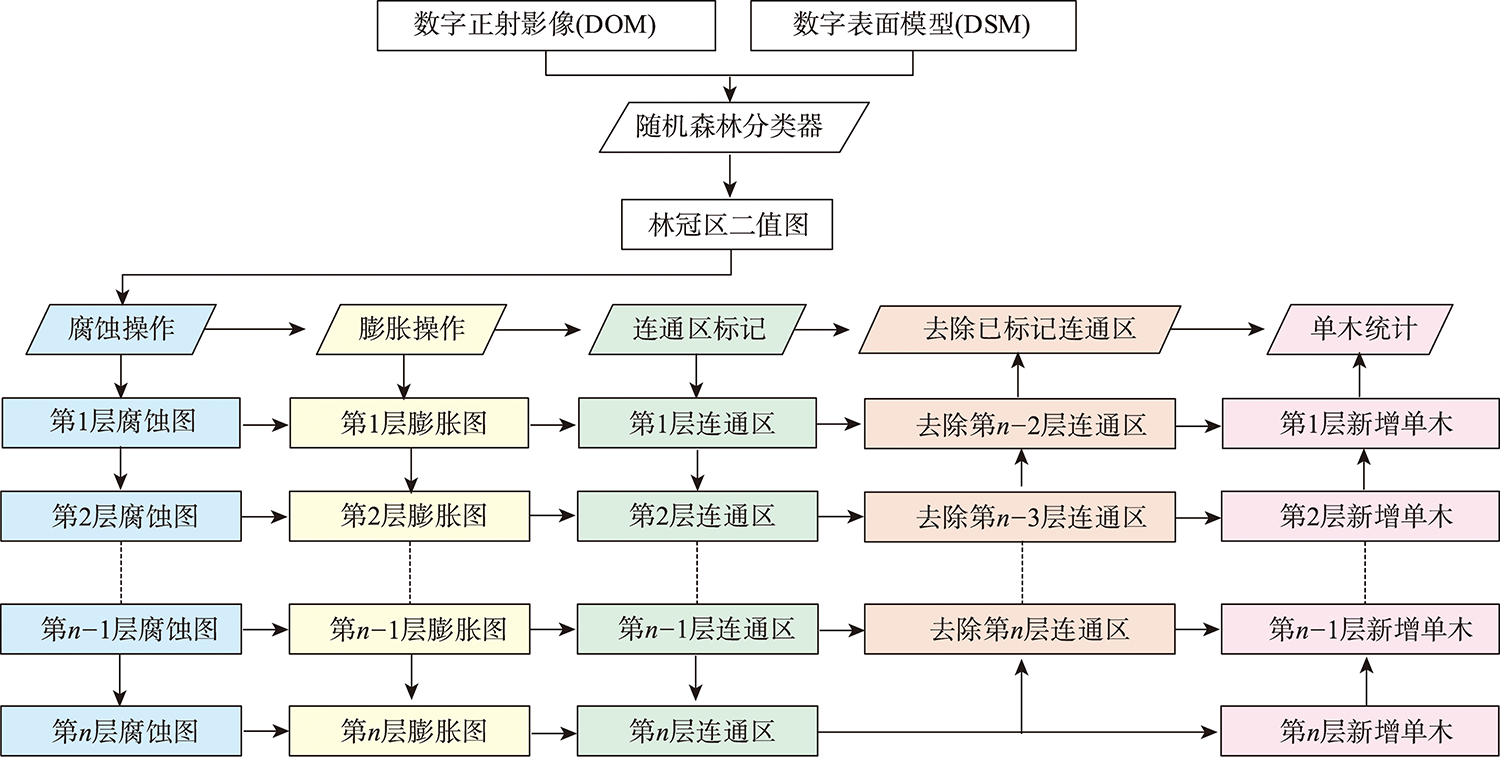
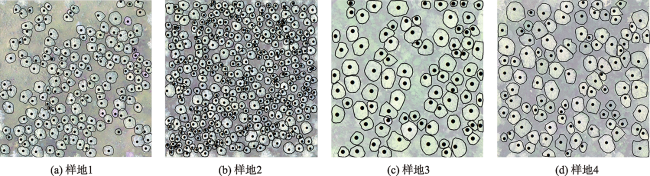
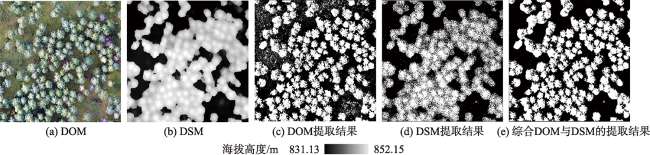
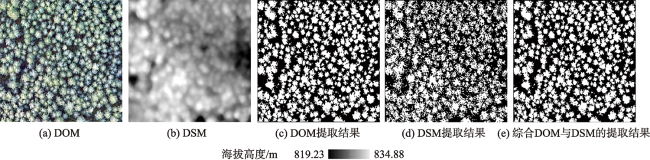
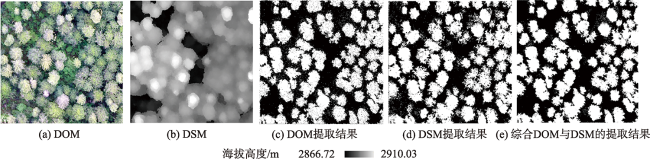
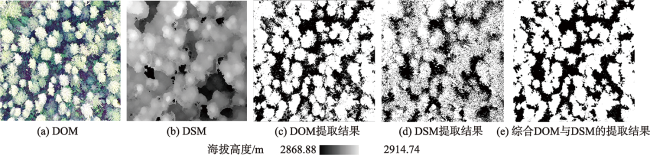
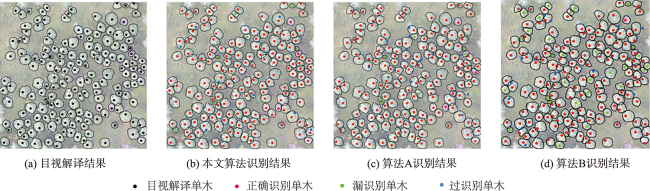
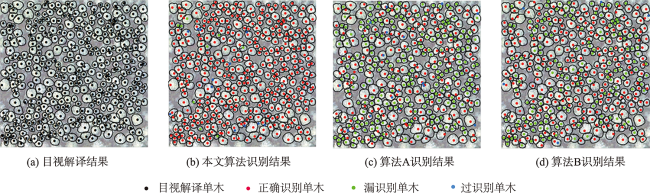
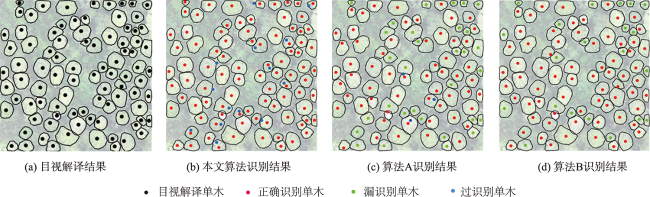
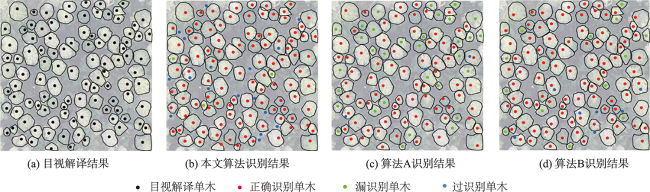
Forest is not only the main body of terrestrial ecosystem, but also one of the most important natural resources for human being. Individual tree parameters are of great significance to current forest resource management, ecological research, and biodiversity protection. However, the traditional forest surveys are realized through manual measurement of each tree, which is labor intensive and low efficient. UAV stereo imagery and individual tree recognition algorithms provide the foundations for low-cost and automatic acquisition of individual tree parameters. In recent years, there are a lot of research on individual tree recognition based on UAV stereo imagery. The existing studies show that the commonly used individual tree recognition algorithm based on local maximum search has a serious problem of missing recognition in dense stands, which affects the accuracy of tree parameters. Therefore, it is necessary to develop a robust individual tree recognition algorithm to overcome the problem of missing recognition for UAV stereo imagery. In this paper, a new algorithm of individual tree recognition in UAV stereo imagery was proposed, which takes into account the three-dimensional morphology of tree crown. Firstly, the height and RGB spectral information of UAV stereo imagery were used synthetically to extract the canopy area based on Random Forest (RF) classifier. Secondly, the multi-layers morphological corrosion, expansion, and connected area labeling were used to separate the connected trees and extract the center coordinates of the tree crown, so as to realize the individual tree recognition. Thirdly, in order to verify the recognition effect of the algorithm on different forest types, four sample plots in Daxing'anling forest region and Wanglang forest region were selected for verification. The visual interpretation data was used as reference and compared with local maximum search algorithm based on elevation value (algorithm A) and local maximum search algorithm based on RGB spectral brightness values (algorithm B). Results show that combination of DOM and DSM can improve the extraction accuracy of the forest canopy area to a certain extent. Meanwhile, the average F1 score of the proposed algorithm in four plots is 94.17%, which is 15.85% and 9.37% higher than those of algorithm A and B. For dense sample plots, the recall of this algorithm is 51.79% and 35.64% higher than those of algorithm A and algorithm B. The proposed algorithm can achieve good recognition effect in different forest areas. Moreover, it can effectively avoid the problem of missing recognition on dense forest stands. This paper provides a new idea for individual tree recognition based on UAV stereo imagery.
LIU Jianli , LIAO Xiaohan , NI Wenjian , WANG Yong , YE Huping , YUE Huanyin . Individual Tree Recognition Algorithm of UAV Stereo Imagery Considering Three-dimensional Morphology of Tree[J]. Journal of Geo-information Science, 2021 , 23(10) : 1861 -1872 . DOI: 10.12082/dqxxkx.2021.210117
表1 林冠区提取精度统计Tab. 1 The precision statistics of extraction of canopy area |
| 样地名 | DOM林冠区提取精度/% | DSM林冠区提取精度/% | 综合DOM和DSM的林冠区提取精度/% |
|---|---|---|---|
| 样地1 | 92.56 | 78.46 | 98.84 |
| 样地2 | 98.71 | 78.85 | 98.85 |
| 样地3 | 90.40 | 76.76 | 91.50 |
| 样地4 | 83.37 | 71.21 | 86.40 |
表2 单木识别结果统计对比Tab. 2 The statistical comparison of individual tree recognition |
| 样地名 | 参考单木株数 | 算法 | 识别株数/株 | 过、错识别/株 | 漏识别/株 | 正确识别/株 | 查准率/% | 查全率/% | F1-score/% | |
|---|---|---|---|---|---|---|---|---|---|---|
| 样地1 | 172 | 本文算法 | 173 | 8 | 7 | 165 | 95.38 | 95.93 | 95.65 | |
| 算法A | 178 | 13 | 7 | 165 | 92.70 | 95.93 | 94.29 | |||
| 算法B | 154 | 13 | 31 | 141 | 91.56 | 81.98 | 86.50 | |||
| 样地2 | 390 | 本文算法 | 393 | 12 | 9 | 381 | 96.95 | 97.69 | 97.32 | |
| 算法A | 195 | 16 | 211 | 179 | 91.79 | 45.90 | 61.20 | |||
| 算法B | 247 | 5 | 148 | 242 | 97.98 | 62.05 | 75.98 | |||
| 样地3 | 89 | 本文算法 | 103 | 14 | 0 | 89 | 86.41 | 100.00 | 92.71 | |
| 算法A | 61 | 3 | 31 | 58 | 95.08 | 65.17 | 77.33 | |||
| 算法B | 68 | 0 | 21 | 68 | 100.00 | 76.40 | 86.62 | |||
| 样地4 | 104 | 本文算法 | 118 | 17 | 3 | 101 | 85.59 | 97.12 | 90.99 | |
| 算法A | 75 | 3 | 32 | 72 | 96.00 | 69.23 | 80.45 | |||
| 算法B | 98 | 7 | 13 | 91 | 92.86 | 87.50 | 90.10 | |||
| [1] |
|
| [2] |
|
| [3] |
刘见礼, 张志玉, 倪文俭, 等. 无人机影像匹配点云单木识别算法[J]. 遥感信息, 2019, 34(1):93-101.
[
|
| [4] |
刘清旺, 李增元, 陈尔学, 等. 利用机载激光雷达数据提取单株木树高和树冠[J]. 北京林业大学学报, 2008, 30(6):83-89.
[
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
李旺, 牛铮, 王成, 等. 机载LiDAR数据估算样地和单木尺度森林地上生物量[J]. 遥感学报, 2015, 19(4):669-679.
[
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}