
Journal of Geo-information Science >
Denoising and Classification of ICESat-2 Photon Point Cloud based on Convolutional Neural Network
Received date: 2021-03-03
Request revised date: 2021-05-31
Online published: 2022-01-25
Supported by
Guangxi Natural Science Fund for Innovation Research Team, No(2019GXNSFGA245001)
National Natural Science Foundation of C-hina, No(42071405)
The Youth Innovation Promotion Association Chinese Academy of Sciences, No(2019130)
Copyright
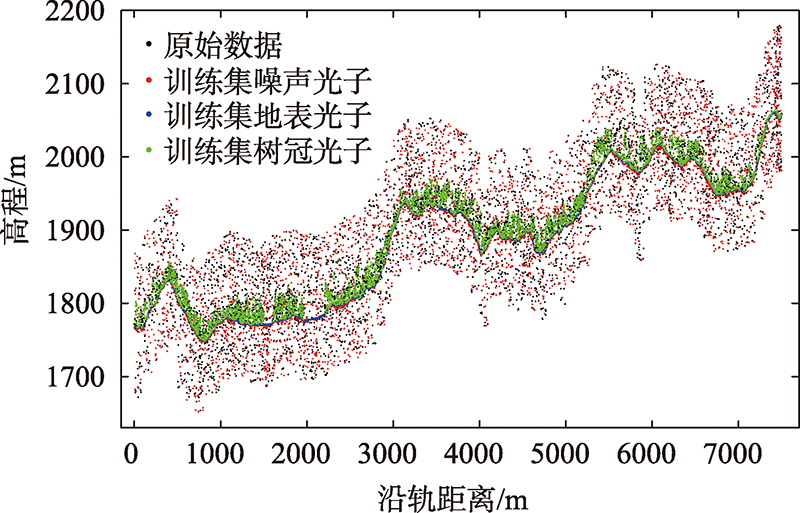
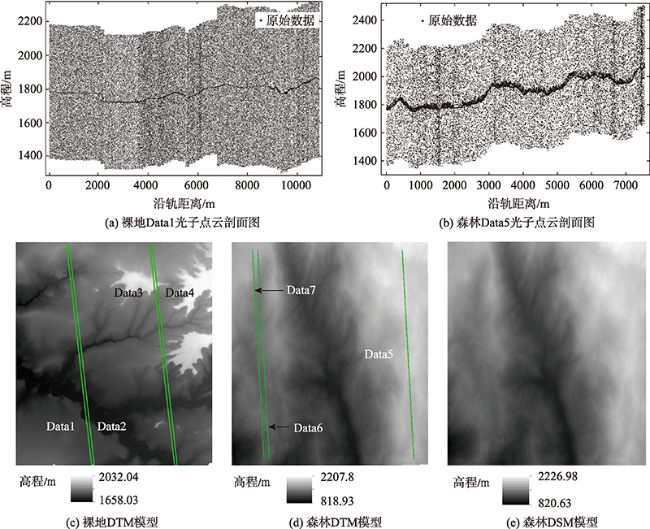
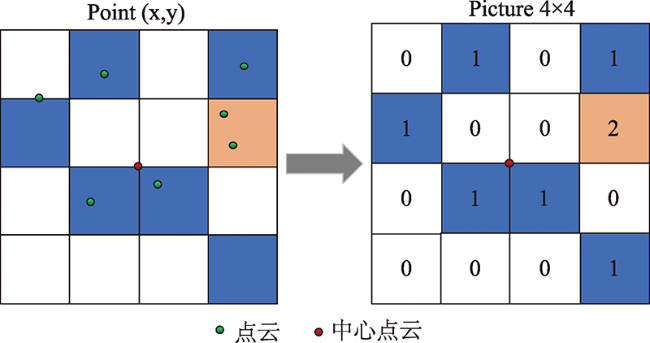
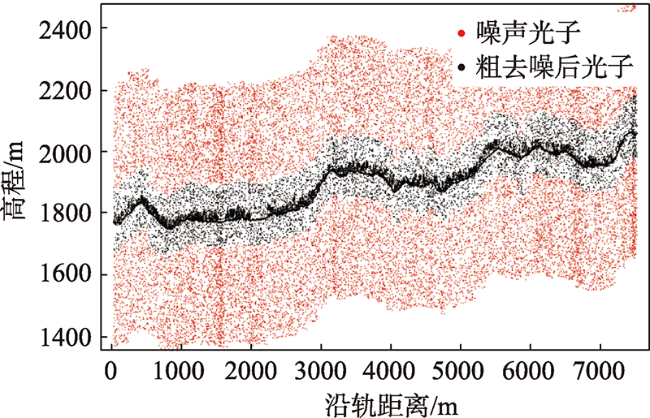
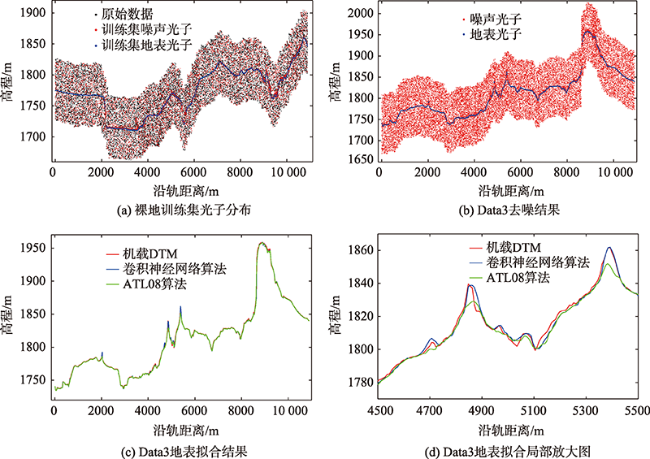
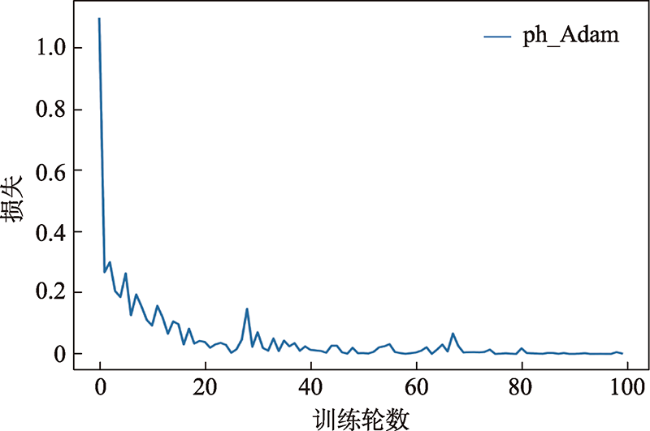
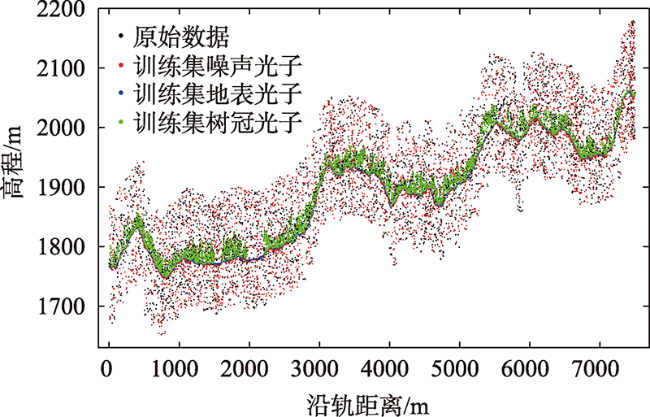
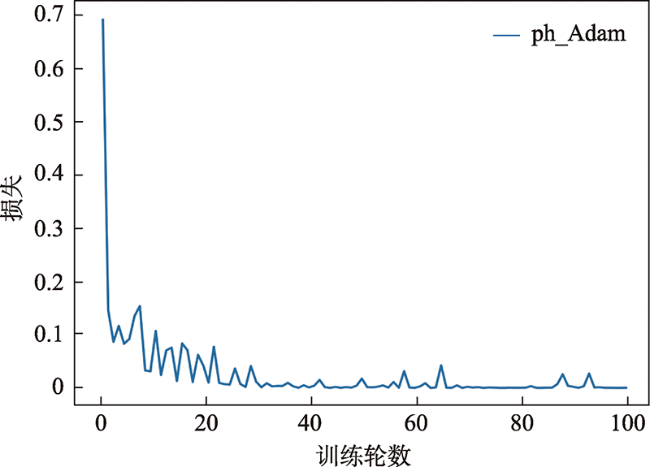
ICESat-2 (Ice, Cloud, and land Elevation Satellite-2) launched by NASA (National Aeronautics and Space Administration) in 2018 is a laser altitude measurement satellite. The advanced topographic laser altimeter system (ATLAS) instrument on-board ICESat-2 employs a micro-pulse and multi-beam photon counting laser altimeter system with low energy consumption, high detection sensitivity, and high repetition rates, and thus greatly improves the sampling density in the along-track distance. However, it introduces a significant number of solar noise photons in the raw data. How to effectively remove the noise photons and classify the signal photons into ground photons and canopy photons is critical for subsequent applications such as the estimation of terrain elevation and forest height, and it has been a hot and challenging topic in the current research. In this paper, a denoising and classification algorithm based on convolutional neural network was proposed. The convolutional neural network has made a series of breakthrough research results in the fields of image classification, object detection, semantic segmentation, and so on. To remove obvious noise photons, the photons were first divided into grids in the along-track distance and elevation direction, and the rough signal photons were gridded into pictures. Then, the convolutional neural network was employed to perform the final denoising and classification. Finally, the proposed algorithm was tested with the airborne LiDAR datasets, including DSM (Digital Surface Model) and DTM (Digital Terrain Model), and was further compared with ATL08 (land and vegetation height) products. Experimental results show that our proposed algorithm can remove noise photons effectively in bare land and forest areas. Moreover, this algorithm can simultaneously remove noise photons and classify signal photons into ground photons and canopy photons in forest areas. The R 2 and RMSE values of the retrieved ground surface in the bare land areas were 1.0 and 0.72 m, respectively. In the forest areas, the R 2 of the estimated ground surface and canopy surface were 1.0 and 0.70 with the RMSE values of 1.11 m and 4.99 m, respectively. The reason for this result may be that it is difficult for photons to penetrate the forest canopy and reach the ground surface in forest areas, which causes the RMSE value of the forest area to be larger than that of the bare land area. In this paper, the deep learning algorithm was used to realize the denoising and classification of photon counting data, and good results were achieved in bare land and forest areas, which provides a reference for subsequent photon counting LiDAR data processing.
LU Dajin , LI Dong , ZHU Xiaoxiao , NIE Sheng , ZHOU Guoqing , ZHANG Xingyi , YANG Chao . Denoising and Classification of ICESat-2 Photon Point Cloud based on Convolutional Neural Network[J]. Journal of Geo-information Science, 2021 , 23(11) : 2086 -2095 . DOI: 10.12082/dqxxkx.2021.210103
表1 裸地去噪分类结果对比Tab. 1 Comparison of denoising and classification in bare land area |
| 数据集 | 卷积神经网络算法 | ATL08 | |||||
|---|---|---|---|---|---|---|---|
| R2 | MAE/m | RMSE/m | R2 | MAE/m | RMSE/m | ||
| Data1 | 0.99 | 0.58 | 0.65 | 0.99 | 0.59 | 0.67 | |
| Data2 | 0.99 | 0.65 | 0.71 | 0.99 | 0.70 | 0.83 | |
| Data3 | 0.99 | 0.59 | 0.83 | 0.99 | 0.59 | 0.86 | |
| Data4 | 0.99 | 0.62 | 0.68 | 0.99 | 0.74 | 0.90 | |
表2 森林去噪分类结果对比Tab. 2 Comparison of denoising and classification in forest area |
| 数据集 | 地表 | 树冠 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 卷积神经网络算法 | ATL08 | 卷积神经网络算法 | ATL08 | ||||||||||
| R2 | MAE/m | RMSE/m | R2 | MAE/m | RMSE/m | R2 | MAE/m | RMSE/m | R2 | MAE/m | RMSE/m | ||
| Data5 | 0.99 | 0.65 | 0.72 | 0.99 | 0.72 | 0.86 | 0.74 | 4.45 | 4.78 | 0.53 | 5.08 | 5.30 | |
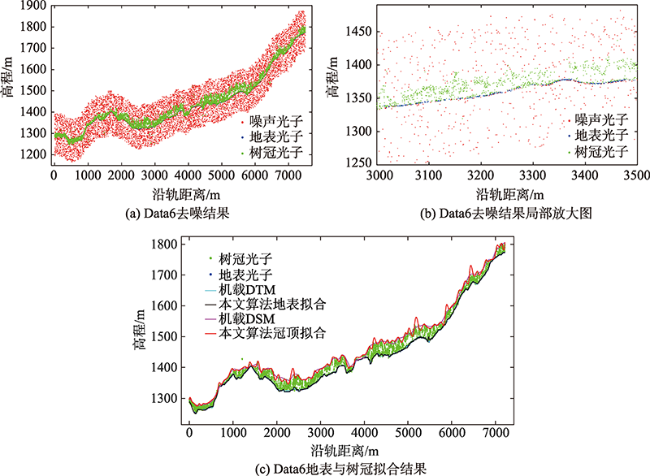
| Data6 | 0.99 | 0.94 | 1.22 | 0.99 | 1.05 | 1.35 | 0.65 | 4.89 | 5.21 | 0.43 | 5.87 | 6.31 | |
| Data7 | 0.99 | 0.98 | 1.39 | 0.99 | 1.07 | 1.49 | 0.70 | 4.73 | 4.97 | 0.58 | 6.11 | 6.43 | |
| [1] |
方勇, 曹彬才, 高力, 等. 激光雷达测绘卫星发展及应用[J]. 红外与激光工程, 2020, 49(11):19-27.
[
|
| [2] |
庞勇, 李增元, 陈博伟, 等. 星载激光雷达森林探测进展及趋势[J]. 上海航天, 2019, 36(3):20-28.
[
|
| [3] |
岳春宇, 郑永超, 邢艳秋, 等. 星载激光遥感林业应用发展研究[J]. 红外与激光工程, 2020, 49(11):97-106.
[
|
| [4] |
朱笑笑, 王成, 习晓环, 等. ICESat-2星载光子计数激光雷达数据处理与应用研究进展[J]. 红外与激光工程, 2020, 49(11):68-77.
[
|
| [5] |
|
| [6] |
么嘉棋, 唐新明, 李国元, 等. 激光测高卫星ICESat-2云检测及其相关算法[J]. 激光与光电子学进展, 2020, 57(13):131408.
[
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
杨帆, 温家洪. ICESat与ICESat-2应用进展与展望[J]. 极地研究, 2011, 23(2):138-148.
[
|
| [11] |
|
| [12] |
夏少波, 王成, 习晓环, 等. ICESat-2机载试验点云滤波及植被高度反演[J]. 遥感学报, 2014, 18(6):1199-1207.
[
|
| [13] |
曹彬才, 方勇, 江振治, 等. ICESat-2 ATL08去噪算法实现及精度评价[J]. 测绘通报, 2020(5):25-30.
[
|
| [14] |
|
| [15] |
陈博伟, 庞勇, 李增元, 等. 基于随机森林的光子计数激光雷达点云滤波[J]. 地球信息科学学报, 2019, 21(6):898-906.
[
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
李彦冬, 郝宗波, 雷航. 卷积神经网络研究综述[J]. 计算机应用, 2016, 36(9):2508-2515,2565.
[
|
| [26] |
周飞燕, 金林鹏, 董军. 卷积神经网络研究综述[J]. 计算机学报, 2017, 40(6):1229-1251.
[
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}