
Journal of Geo-information Science >
Advance in Character Mining and Prediction of Ship Behavior based on AIS Data
Received date: 2021-08-24
Request revised date: 2021-11-20
Online published: 2022-02-25
Supported by
Natural Science Foundation of China(52001134)
Science and Technology Innovation Special Zone project of Science and Technology Department of central Military Commission(KL12004)
Natural Science Foundation of Fujian Province(2020J01661)
Hubei Provincial Key Laboratory of Inland River Navigation Technology(NHHY2020001)
Copyright
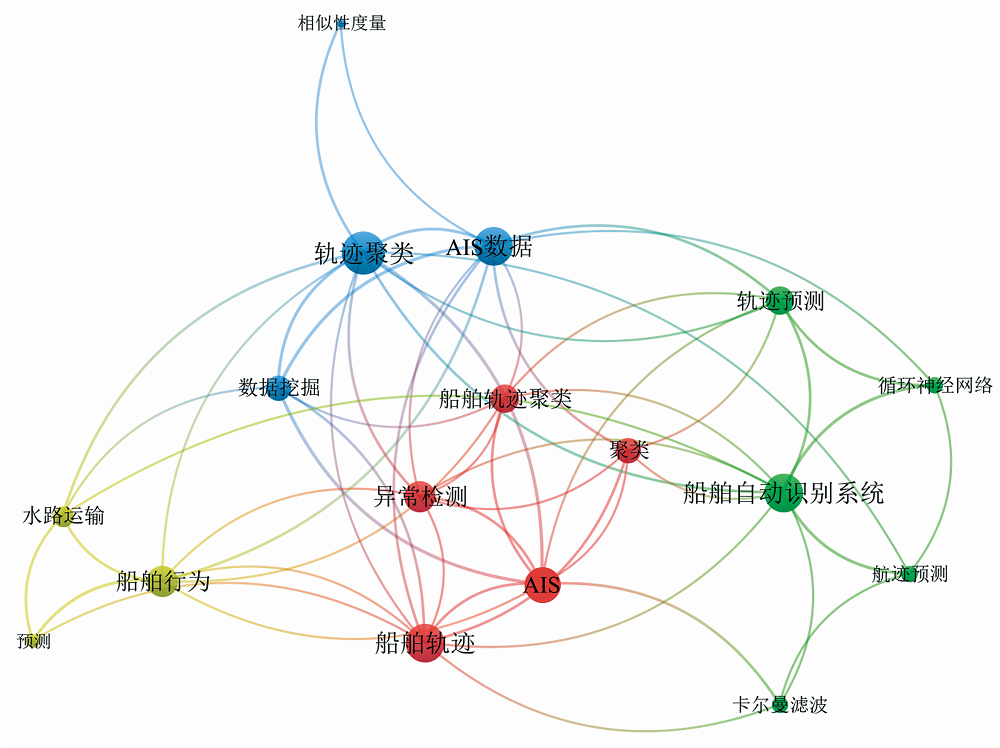
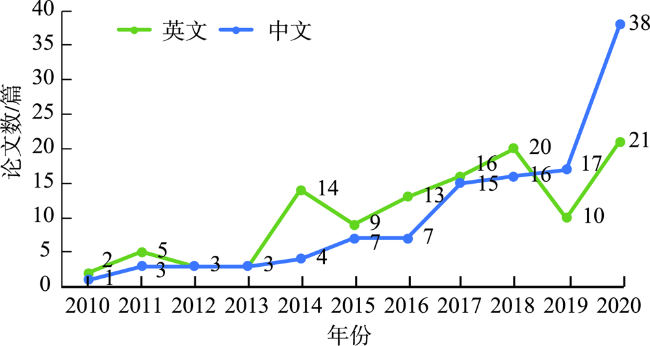
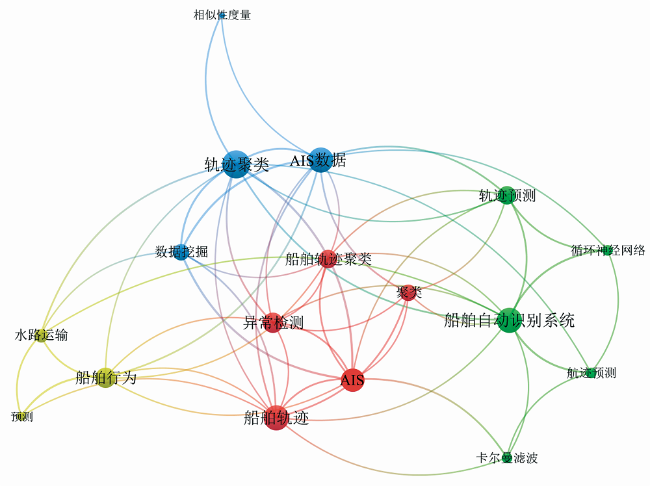
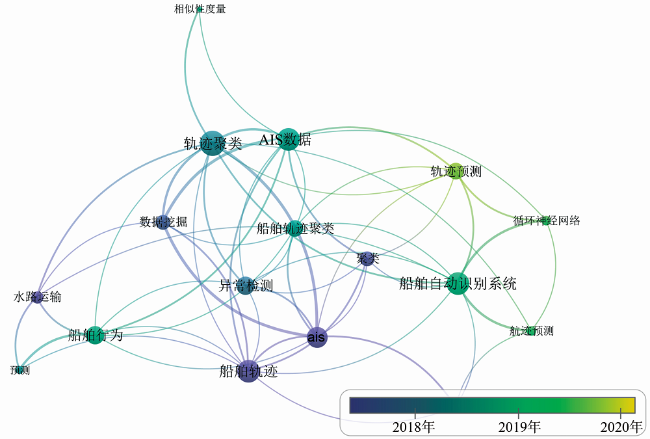
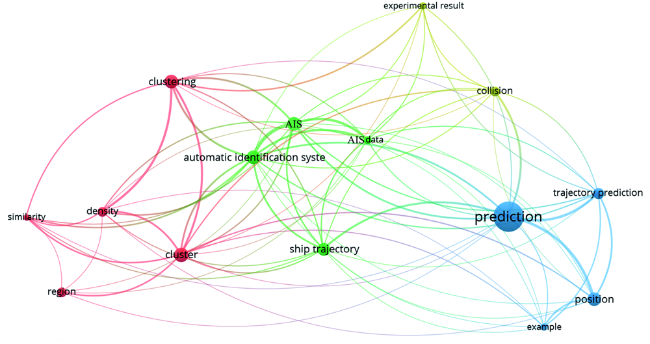
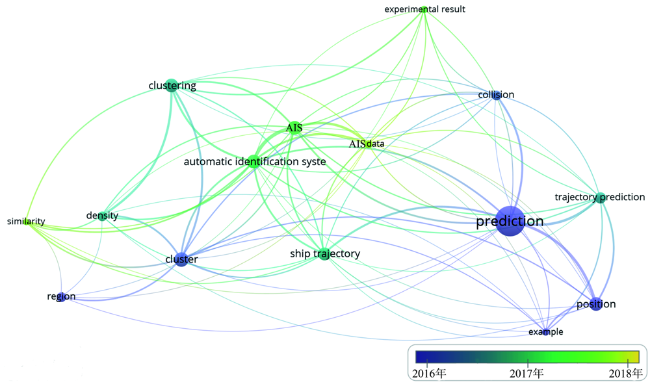
The mining and prediction of ship behavior characteristics is an important research content of maritime intelligent transportation system and a key scientific problem in the field of transportation engineering. In order to systematically study the research status and development trend of ship behavior characteristic mining and prediction, the Vosviewer is used to generate the clustering map and trend evolution map of high-frequency keywords of research content from the perspective of bibliometrics, based on literatures collected from WOS database and CNKI database. After comprehensive analysis, three topics of data mining of maritime traffic elements based on Automatic Identification System (AIS), ship behavior clustering research and ship behavior prediction research are summarized. The research contents, methods and existing problems of each topic are systematically analyzed. The research results show that: ① In the aspect of data mining of maritime traffic elements based on AIS, the research mainly focuses on the mining of spatial features of maritime traffic and temporal features of traffic flow,and the results are lack of sufficient association mining of time features AIS data and background environment features. Further exploration needs to be made on the mining of space-time characteristics and data fusion. ②In the aspect of ship behavior clustering, the research mainly uses the unsupervised clustering method to study the clustering of ship track points and ship track segments to obtain the spatial-temporal distribution of ship navigation behavior patterns and the maneuvering intention. The similarity calculation method of ship trajectory integrating multidimensional features, identification of ship the adaptive selection of clustering parameters and the semantic modeling of ship behavior need to be further studied. ③ In the aspect of ship behavior prediction, it mainly focuses on the prediction of ship behavior based on dynamic equation, traditional intelligent algorithm and deep neural network. Considering the characteristics of randomness, diversity and coupling of ship behavior, the use of hybrid neural network model and combining neural network with vector machine. In the end, the paper proposes the promising research area which include mining of ship behavior feature based on semantic model, the prediction of ship behavior based on deep convolutional neural network, the mining of ship behavior feature based on knowledge graph and the visualization of prediction results.
ZHEN Rong , SHAO Zheping , PAN Jiacai . Advance in Character Mining and Prediction of Ship Behavior based on AIS Data[J]. Journal of Geo-information Science, 2021 , 23(12) : 2111 -2127 . DOI: 10.12082/dqxxkx.2021.210495
图4 船舶行为特征挖掘与预测英文文献聚类图谱注:不同的颜色代表不同的研究主题类,节点的大小代表该研究内容出现频率的高低。 Fig. 4 Literature cluster map of ship behavior characteristics mining and prediction |
表1 水上交通要素的内容及方法研究总结Tab. 1 Summary of research contents and methods of marine traffic element |
| 研究主题 | 研究内容 | 研究方法及模型 |
|---|---|---|
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] | |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] | |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) | |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] | |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
表2 船舶行为聚类研究内容及方法总结Tab. 2 Summary of research contents and methods of ship behavior clustering |
| 研究主题 | 研究内容 | 研究方法及模型 |
|---|---|---|
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 | |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] | |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] | |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
表3 船舶行为预测研究总结Tab. 3 Research summary of ship behavior prediction |
感谢大连海事大学许小卫博士在文章修改中给予的帮助。
| [1] |
赵晨, 马桂山. 交通运输部等七部门联合印发《智能航运发展指导意见》[J]. 中国海事, 2019(6):2-3.
[
|
| [2] |
刘磊, 蒋仲廉, 初秀民, 等. 船舶自动识别系统数据修复和预测算法研究[J]. 哈尔滨工程大学学报, 2019, 40(6):1072-1077.
[
|
| [3] |
金辉, 刘克中, 马杰, 等. 基于高斯混合模型的船舶到达规律研究[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44(1):162-166.
[
|
| [4] |
马杰, 李文楷, 张春玮, 等. 基于AIS数据的交汇水域船舶会遇态势辨识[J]. 中国航海, 2021, 44(1):68-74.
[
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
张嘉琪, 付振楷. 船舶避碰系统研究综述[J]. 科学技术与工程, 2019, 19(34):32-39.
[
|
| [9] |
周世波, 徐维祥. 船舶轨迹异常检测方法研究进展[J]. 电子测量与仪器学报, 2017, 31(3):329-337.
[
|
| [10] |
|
| [11] |
唐存宝, 邵哲平, 唐强荣, 等. 基于AIS的船舶航迹分布算法[J]. 集美大学学报(自然科学版), 2012, 17(2):109-112.
[Tang,
|
| [12] |
罗璞. 基于轨迹大数据的船舶类型自动识别方法研究[D]. 北方工业大学, 2021.
[
|
| [13] |
田利芹, 贾杰. 三次样条插值在船舶轨迹修复中的研究[J]. 舰船科学技术, 2016, 38(6):79-81.
[
|
| [14] |
毕月琨. AIS基站系统中的数据解析与压缩[D]. 舟山:浙江海洋学院, 2014.
[
|
| [15] |
蔡奉君, 胡勤友, 施朝健. 一种船舶运动状态插值算法[J]. 中国航海, 2015, 38(1):71-74.
[
|
| [16] |
刘立群, 吴超仲, 褚端峰, 等. 基于Vondrak滤波和三次样条插值的船舶轨迹修复研究[J]. 交通信息与安全, 2015, 33(4):100-105.
[
|
| [17] |
|
| [18] |
|
| [19] |
崔可征. 基于机器学习的船舶AIS轨迹预测方法研究[D]. 郑州:郑州大学, 2020.
[
|
| [20] |
王超, 纪永刚, 黎明, 等. 一种考虑船舶航速航向的AIS航迹插值方法[J]. 舰船科学技术, 2015, 37(4):60-64.
[
|
| [21] |
王晨曦. 雷达与AIS数据融合算法研究[D]. 哈尔滨工程大学, 2017.
[
|
| [22] |
林长川, 孙腾达, 洪爰助, 等. 雷达与AIS目标航迹模糊关联算法与仿真[J]. 系统仿真学报, 2006, 18(S2):903-905,908.
[
|
| [23] |
|
| [24] |
刘庆华, 仲海啸, 陶峰, 等. 卡尔曼滤波融合新算法及其船舶高精度液位测量的应用[J]. 中国造船, 2016, 57(2):192-200.
[
|
| [25] |
张乾君. 基于时间序列聚类的多雷达数据融合[J]. 电讯技术, 2019, 59(2):1-7.
[
|
| [26] |
范耀天, 王驰. 内河船舶AIS与雷达动态信息集成性融合[J]. 中国航海, 2017, 40(4):16-20.
[
|
| [27] |
张树凯, 刘正江, 张显库, 等. 基于Douglas-Peucker算法的船舶AIS航迹数据压缩[J]. 哈尔滨工程大学学报, 2015, 36(5):1-5.
[
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
高邈, 史国友, 李伟峰. 改进的Sliding Window在线船舶AIS轨迹数据压缩算法[J]. 交通运输工程学报, 2018, 18(3):218-227.
[
|
| [32] |
董婉婷, 于红, 周弈志, 等. 基于改进滑动窗口的渔船AIS轨迹数据压缩算法[J]. 大连海洋大学学报, 2020, 35(3):462-468.
[
|
| [33] |
张远强, 史国友, 李松. 基于在线有向无环图的船舶轨迹压缩算法[J]. 交通运输工程学报, 2020, 20(4):227-236.
[
|
| [34] |
刘钊, 刘敬贤, 周锋, 等. 船舶交通流行为特征及其在水上交通组织中的应用[J]. 大连海事大学学报, 2014, 40(2):22-26.
[
|
| [35] |
金兴赋, 付玉慧, 张连东. 基于AIS 数据的成山头水域船舶交通流研究[J]. 大连海事大学学报, 2012, 38(1):33-36.
[
|
| [36] |
柯冉绚, 胡栩祯, 陈毅. 基于IWRAP模型的船舶交通流数据拟合模型[J]. 中国航海, 2018, 41(4):77-82,89.
[
|
| [37] |
|
| [38] |
孟范立. 利用AIS数据挖掘建立船舶到达规律模型[J]. 舰船科学技术, 2016, 38(10):28-30.
[
|
| [39] |
甘浪雄, 张磊, 邹早建. 基于场方法的船舶交通流分析[J]. 上海交通大学学报, 2014, 48(4):551-557.
[
|
| [40] |
王震, 李伟峰, 高邈. 多算法结合的船舶交通流框架提取[J]. 上海海事大学学报, 2021, 42(2):45-52.
[
|
| [41] |
潘家财, 邵哲平, 姜青山. 船舶会遇的时空数据挖掘算法及应用[J]. 中国航海, 2010, 33(4):57-64.
[
|
| [42] |
肖潇, 邵哲平, 潘家财. 基于AIS的特定船舶会遇实况分布[J]. 中国航海, 2014, 37(3):50-53.
[
|
| [43] |
冮龙晖, 郑中义, 齐乐. AIS数据中船舶会遇信息的提取方法[J]. 中国科技论文, 2017, 12(7):802-805.
[
|
| [44] |
欧阳知雨, 张安民, 张永兵. 基于AIS的船舶会遇局面紧迫度量化分析[J]. 海洋通报, 2019, 38(2):225-232.
[
|
| [45] |
|
| [46] |
吴兆麟. 海上交通工程[M]. 大连: 大连海事大学出版社, 2004:51-53.
[
|
| [47] |
郭禹. 航海学[M]. 大连: 大连海事大学出版社, 2014.
[
|
| [48] |
章永来, 周耀鉴. 聚类算法综述[J]. 计算机应用, 2019, 39(7):1869-1882.
[
|
| [49] |
杨威, 龙华, 邵玉斌, 等. 基于切比雪夫距离的密度计算与K-means的聚类方法研究[J]. 通信技术, 2019, 52(4):833-838.
[
|
| [50] |
|
| [51] |
|
| [52] |
牟军敏, 陈鹏飞, 贺益雄, 等. 船舶AIS轨迹快速自适应谱聚类算法[J]. 哈尔滨工程大学学报, 2018, 39(3):428-432.
[
|
| [53] |
李爽, 史国友, 高邈, 等. 基于改进谱聚类算法的航路辨识[J]. 上海海事大学学报, 2019, 40(4):1-6.
[
|
| [54] |
张春玮, 马杰, 牛元淼, 等. 基于行为特征相似度的船舶轨迹聚类方法[J]. 武汉理工大学学报(交通科学与工程版), 2019, 43(3):517-521.
[
|
| [55] |
包磊. 基于聚类距离计算的船舶轨迹异常检测方法[J]. 舰船电子工程, 2020, 40(9):56-61.
[
|
| [56] |
|
| [57] |
王天真, 刘萍, 汤天浩, 等. 一种基于k-means聚类的航运信息孤立点分析算法[J]. 上海海事大学学报, 2011, 32(3):54-57.
[
|
| [58] |
甄荣, 邵哲平, 潘家财, 等. 基于统计学理论的船舶轨迹异常研究[J]. 集美大学学报, 2015, 20(3):193-197.
[
|
| [59] |
|
| [60] |
周世波, 徐维祥. 密度峰值快速搜索与聚类算法及其在船舶位置数据分析中的应用[J]. 仪器仪表学报, 2018, 39(7):152-163.
[
|
| [61] |
杜磊, 文元桥, 肖长诗. 自由航行海域船舶碰撞概率计算[J]. 中国安全科学学报, 2015, 25(1):53-58.
[
|
| [62] |
陈德军, 刘冬, 郭南彬, 等. 基于层次聚类自动巡航的港区船舶碰撞危险识别方法研究[J]. 武汉理工大学学报(交通科学与工程版), 2017, 41(1):12-16.
[
|
| [63] |
肖潇, 邵哲平, 潘家财, 等. 基于AIS信息的船舶轨迹聚类模型及应用[J]. 中国航海, 2015, 38(2):82-86.
[
|
| [64] |
王森杰, 何正伟. 分层建模的船舶轨迹快速聚类算法[J]. 武汉理工大学学报(交通科学与工程版), 2021, 45(3):596-601.
[
|
| [65] |
李雨潇, 吴传生, 刘文, 等. 仿射传播和谱聚类的船舶轨迹聚类[J]. 河南科技大学学报(自然科学版), 2018, 39(1):35-40+6.
[
|
| [66] |
刘岳豪, 师本慧. 基于骨架提取的船舶航迹聚类技术研究[J]. 信息技术, 2020, 44(3):50-53+58.
[
|
| [67] |
|
| [68] |
|
| [69] |
|
| [70] |
文元桥, 张义萌, 黄亮, 等. 基于语义的船舶行为动态推理机制[J]. 中国航海, 2019, 42(3):34-39,50.
[
|
| [71] |
|
| [72] |
文元桥, 宋荣鑫, 黄亮, 等. 船舶行为的语义建模与表达[J]. 哈尔滨工业大学学报, 2021, 53(8):109-115.
[
|
| [73] |
|
| [74] |
徐铁, 蔡奉君, 胡勤友, 等. 基于卡尔曼滤波算法船舶AIS轨迹估计研究[J]. 现代电子技术, 2014, 37(5):97-100.
[
|
| [75] |
姜佰辰, 关键, 周伟, 等. 基于多项式卡尔曼滤波的船舶轨迹预测算法[J]. 信号处理, 2019, 35(5):741-746.
[
|
| [76] |
|
| [77] |
|
| [78] |
|
| [79] |
李饶. 船舶航行轨迹预测的数学模型设计[J]. 舰船科学技术, 2020, 42(8):13-15.
[
|
| [80] |
徐婷婷, 柳晓鸣, 杨鑫. 基于BP神经网络的船舶航迹实时预测[J]. 大连海事大学学报, 2012, 38(1):9-11.
[
|
| [81] |
甄荣, 金永兴, 胡勤友, 等. 基于AIS信息和BP神经网络的船舶航行行为预测[J]. 中国航海, 2017, 40(2):6-10.
[
|
| [82] |
高天航, 徐力, 靳廉洁, 等. 考虑航艏向与数据变化差异的船舶轨迹预测[J]. 交通运输系统工程与信息, 2021, 21(1):90-94.
[
|
| [83] |
|
| [84] |
刘娇, 史国友, 杨学钱, 等. 基于DE-SVM的船舶航迹预测模型[J]. 上海海事大学学报, 2020, 41(1):34-39,115.
[
|
| [85] |
|
| [86] |
任宇翔, 赵建森, 刘卫, 等. 基于AIS数据和LSTM网络的船舶航行动态预测[J]. 上海海事大学学报, 2019, 40(3):32-37.
[
|
| [87] |
胡玉可, 夏维, 胡笑旋, 等. 基于循环神经网络的船舶航迹预测[J]. 系统工程与电子技术, 2020, 42(4):871-877.
[
|
| [88] |
徐洪敏. LSTM网络在船舶航行轨迹预测中的应用[J]. 舰船科学技术, 2021, 43(8):37-39.
[
|
| [89] |
|
| [90] |
徐国庆, 马建文, 吴晨辉, 等. 基于Attenton-LSTM神经网络的船舶航行预测[J]. 舰船科学技术, 2019, 41(23):177-180.
[
|
| [91] |
王森杰, 何正伟. 基于生成对抗网络的船舶航迹预测模型[J]. 中国航海, 2021, 44(2):72-77.
[
|
| [92] |
游兰, 韩雪薇, 何正伟, 等. 基于改进Seq2Seq的短时AIS轨迹序列预测模型[J]. 计算机科学, 2020, 47(9):169-174.
[
|
| [93] |
|
| [94] |
|
| [95] |
|
| [96] |
王立林, 刘俊. 基于多尺度卷积的船舶行为识别方法[J]. 计算机应用, 2019, 39(12):3691-3696.
[
|
| [97] |
|
| [98] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}