
Journal of Geo-information Science >
Research on Urban Low-altitude Path Planning Method based on Improved RRT* Algorithm
Received date: 2021-07-19
Request revised date: 2021-09-21
Online published: 2022-05-25
Supported by
National Key Research and Development Program of China(2018YFB0505302)
Copyright
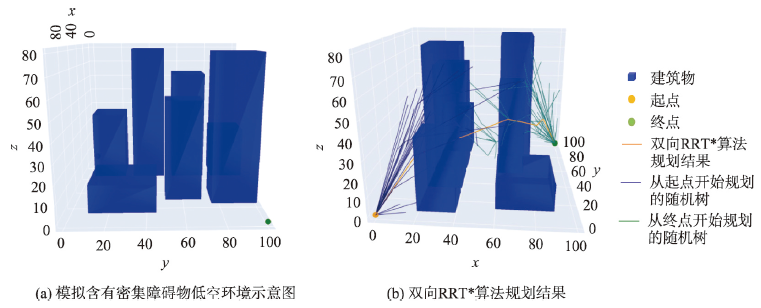
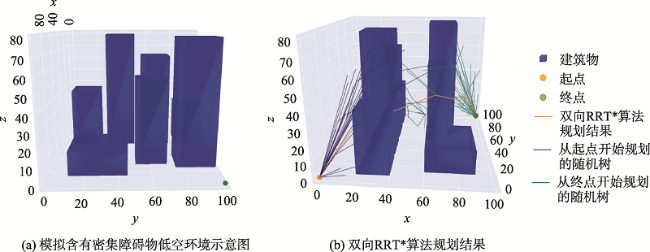
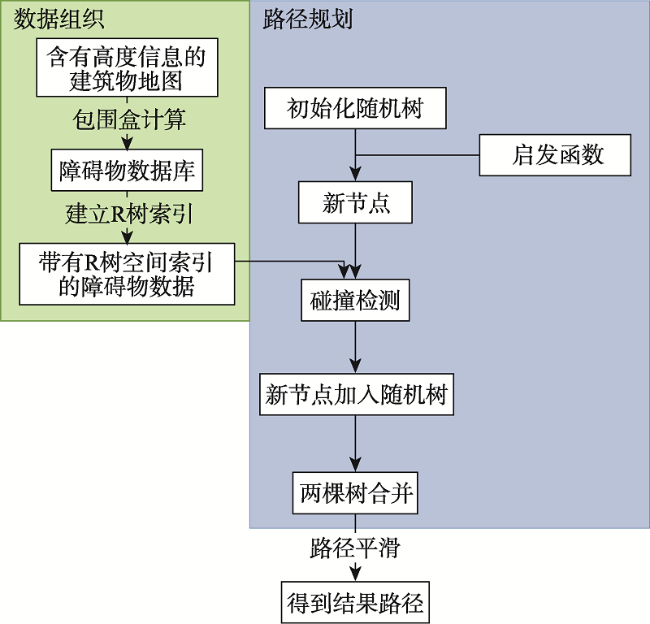
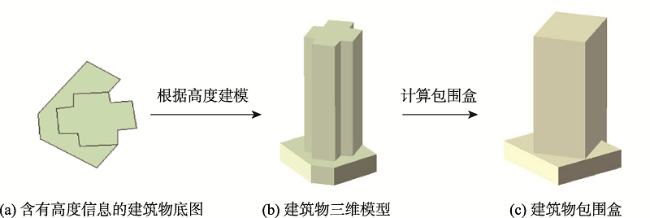
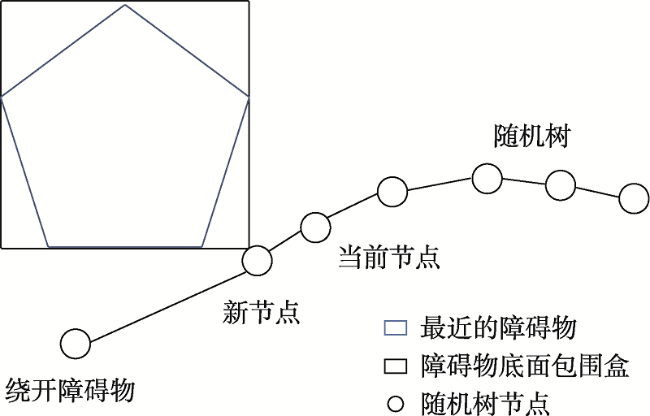
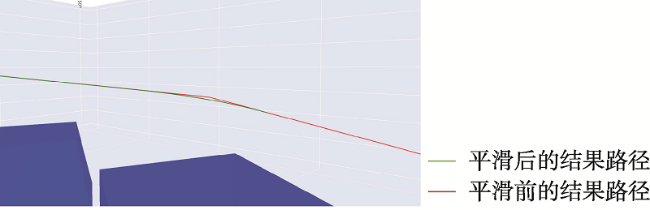
With the wide application of Unmanned Aerial Vehicle (UAV) monitoring, inspection, mapping, and other low-altitude technologies, low-altitude and long-distance aerial path planning has become a great challenge for low-altitude aircraft applications. However, the traditional Rapidly Exploring Random Trees (RRT) and its improved algorithm face the problem of slow computational efficiency in a large-range, long-distance, low-elevation three-dimensional space. Therefore, a bidirectional heuristic RRT* algorithm with R-tree spatial index is proposed in this paper. Based on the bidirectional RRT* algorithm, the heuristic function is set for random sampling process to avoid the occurrence of local minimum when facing the gap between small urban obstacles. On this basis, R tree spatial index is established for urban obstacles, which reduces the time of collision detection in the case of massive obstacles and improves the efficiency of low altitude and long distance air path planning. In addition, in order to obtain a path more in line with the motion law of unmanned aerial vehicle and improve the practicability of the algorithm, a turning threshold is set in the sampling process to control the turning angle to prevent it from being too large, and the planning result path is smoothed by using the cubic B-spline function. Finally, in the three-dimensional city scene of Wuhan, the experiment is carried out using the 3D building data of Wuhan. The experiment results show that, compared with RRT algorithm and bidirectional RRT* algorithm, the planning time of the two-way heuristic RRT* algorithm with R-tree spatial index is reduced by more than 90% at different distances, i.e., 500 m, 2000 m, and 10 000 m. Compared to RRT algorithm, the sampling time is reduced by 51.6%, 75%, and 86.7%, respectively, at different distances; and compared to bidirectional RRT* algorithm, the sampling time is reduced by 20%, 24.7%, and 57.3%, respectively, at different distances. Compared to RRT algorithm, the turning time is reduced by 77.3%, 73.5%, and 78.3%, respectively, at different distances; and compared to bidirectional RRT * algorithm, it is reduced by 37.5%, 30.8%, and 16.8%, respectively, at different distances. The result path length of the bidirectional heuristic RRT * algorithm with R-tree spatial index is also shorter than that of the other two algorithms. Our algorithm applied to low-altitude long-distance air path planning can effectively improve the calculation efficiency and reduce the planning time, reduce sampling times, shorten the result path, reduce the swerve times, and enrich the application scenarios of unmanned aerial vehicle.
LI Yifei , CHEN Jing . Research on Urban Low-altitude Path Planning Method based on Improved RRT* Algorithm[J]. Journal of Geo-information Science, 2022 , 24(3) : 448 -457 . DOI: 10.12082/dqxxkx.2022.210413
表1 障碍物信息存储结构Tab. 1 Obstacle information storage structure |
| 字段说明 | 类型 |
|---|---|
| 障碍物ID | int |
| 底面包围盒左上角点坐标 | float |
| 底面包围盒右上角点坐标 | float |
| 底面包围盒右下角点坐标 | float |
| 底面包围盒左下角点坐标 | float |
| 底面MBR最小横纵坐标 | float |
| 底面MBR最大横纵坐标 | float |
| 障碍物高度H | int |
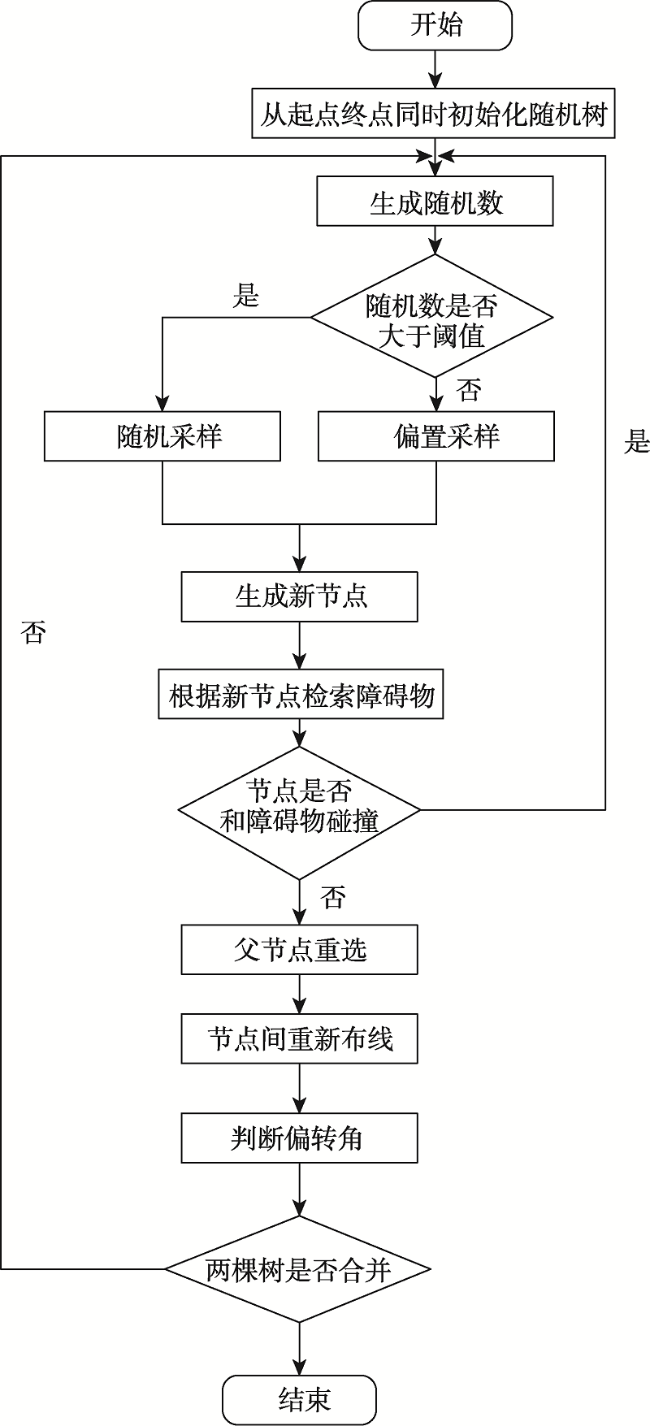
| 算法1 带有R树空间索引的双向启发式RRT*: (Ta,Tb) ← bid-RRT*-h (Ninit, Ngoal) | |
|---|---|
| Ta ← InitializeTree (Ninit); Ea ← Ø; Tb ← InitializeTree (Ngoal); Eb ← Ø; | |
| for i=0 to i=n do | |
| Nrand ← Sample-h (q, V) ; | |
| (Xnew, Ea) ← Extend (Ta, Nrand) ; | |
| Obs ← Index(Xnew); | |
| if (CollisionFree(Xnew, Ea, Obs) = true) then | |
| (Pnear, U) ← Near(Ta, Xnew,r); | |
| Pmin ← Exparent(Pnear, Xnew); | |
| Ta ← Rewire(Ta, Pnear, Pmin, Xnew); | |
| if (Angle(Pnear) = true) then | |
| Delete(Xnew); | |
| if (Connect(Ta, Tb) = true) then | |
| return(Ta, Tb); | |
| Swap(Ta,Tb); | |
| return failure | |
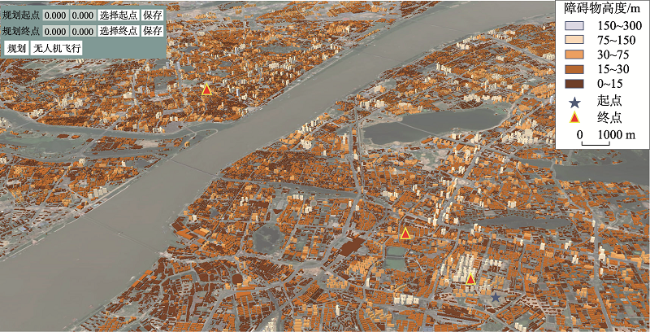
图11 武汉市三维建筑物场景Fig. 11 3D building scene map of wuhan city Part of building data in Wuhan |
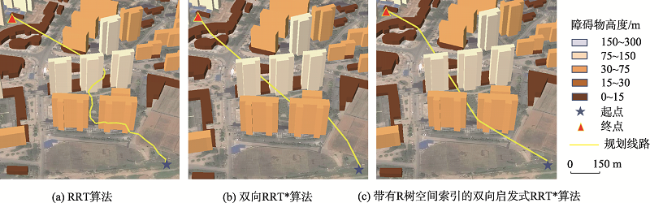
图12 直线距离500 m三种算法规划结果Fig. 12 Planning results of three algorithms for linear distance 500 m |
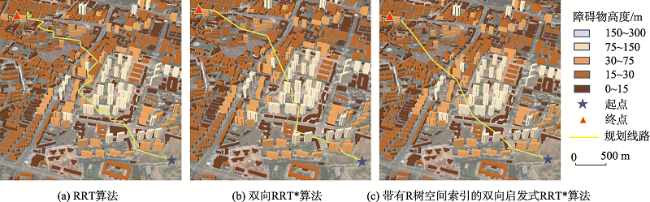
图13 直线距离2000 m三种算法规划结果Fig. 13 Planning results of three algorithms for linear distance 2000 m |
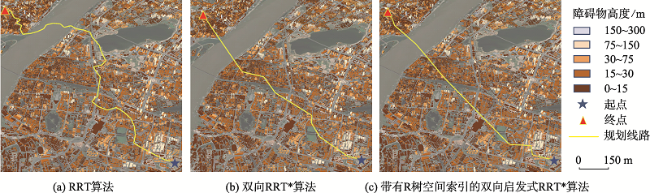
图14 直线距离10 000 m三种算法规划结果Fig. 14 Planning results of three algorithms for linear distance 10000 m |
表2 三种算法在不同距离下的规划时间、采样次数、路径长度和转弯次数Tab. 2 Planning time,iteration times, Number of path nodes and Turning times of three algorithms under different distances |
| 距离/km | RRT算法 | 双向RRT*算法 | 带有R树空间索引的双向 启发式RRT*算法 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 规划 时间/s | 采样 次数/次 | 路径 长度/m | 转弯 次数/次 | 规划 时间/s | 采样 次数/次 | 路径 长度/m | 转弯 次数/次 | 规划 时间/s | 采样 次数/次 | 路径 长度/m | 转弯 次数/次 | |
| 500 | 258.3 | 124 | 554.96 | 22 | 593.4 | 75 | 532.86 | 8 | 1.24 | 60 | 520.37 | 5 |
| 2000 | 1957.8 | 341 | 2681.24 | 34 | 6827.7 | 113 | 2219.74 | 13 | 5.16 | 85 | 2081.63 | 9 |
| 10 000 | 8456.2 | 1386 | 14 309.21 | 46 | 38 546.5 | 297 | 10 522.79 | 12 | 13.48 | 184 | 10 472.51 | 10 |
| [1] |
赵晓, 王铮, 黄程侃, 等. 基于改进A*算法的移动机器人路径规划[J]. 机器人, 2018, 40(6):903-910.
[
|
| [2] |
唐志荣, 冀杰, 吴明阳, 等. 基于改进人工势场法的车辆路径规划与跟踪[J]. 西南大学学报(自然科学版), 2018, 40(6):174-182.
[
|
| [3] |
谭建豪, 肖友伦, 刘力铭, 等. 改进PRM算法的无人机航迹规划[J]. 传感器与微系统, 2020, 39(1):38-41.
[
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
司徒华杰, 雷海波, 庄春刚. 动态环境下基于人工势场引导的RRT路径规划算法[J]. 计算机应用研究, 2021, 38(3):714-717,724.
[
|
| [15] |
刘艳, 马劲松, 张永玉. 三维GIS中R树空间索引研究[J]. 测绘科学, 2010, 35(1):167-168.
[
|
| [16] |
龚俊, 朱庆, 张叶廷, 等. 顾及多细节层次的三维R树索引扩展方法[J]. 测绘学报, 2011, 40(2):249-255.
[
|
| [17] |
于安斌, 梅文胜. 一种R树与格网结合的海量地铁隧道点云管理方法[J]. 武汉大学学报·信息科学版, 2019, 44(10):1553-1559.
[
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
刘奥博, 袁杰. 目标偏置双向RRT*算法的机器人路径规划[J/OL]. 计算机工程与应用:1-8[2021-09-07].
[
|
| [22] |
王嘉琦. 基于改进RRT*算法的无人机避障路径规划[D]. 南昌:南昌航空大学, 2019.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}