
Journal of Geo-information Science >
Identifying Crop Types in Early Growing Season in the Middle Reaches of Heihe River by Fusing Multi-Source Remote Sensing Data
Received date: 2021-08-31
Request revised date: 2021-11-08
Online published: 2022-07-25
Supported by
International (Regional) Cooperation and Exchange Program of National Natural Science Foundation of China(41961134003)
Copyright
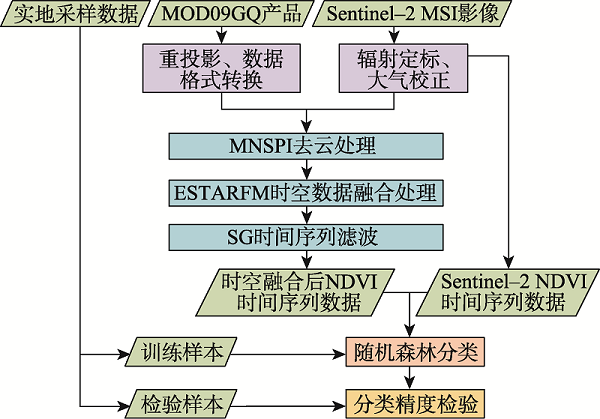
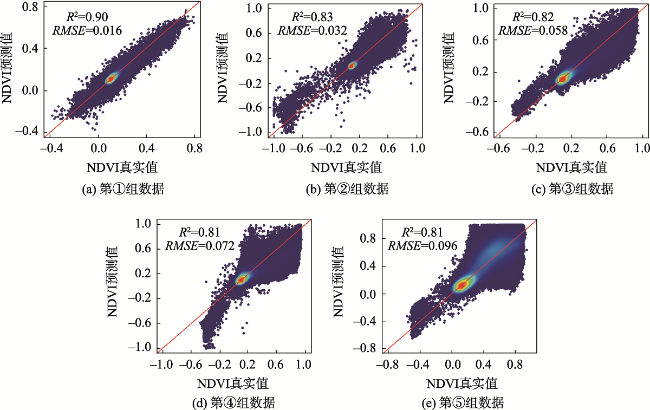
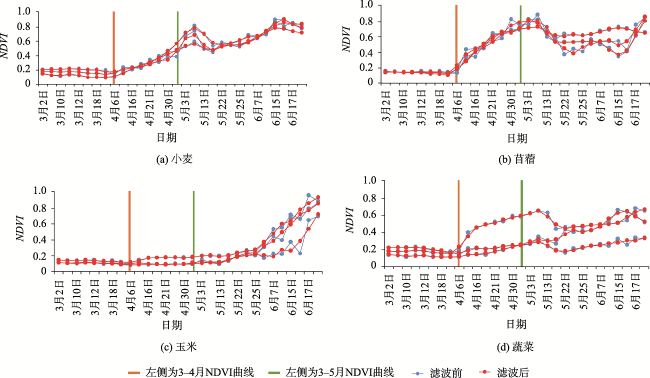
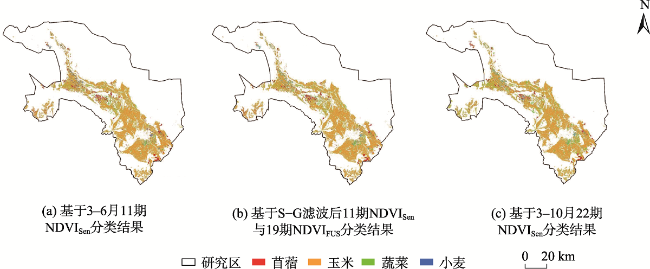
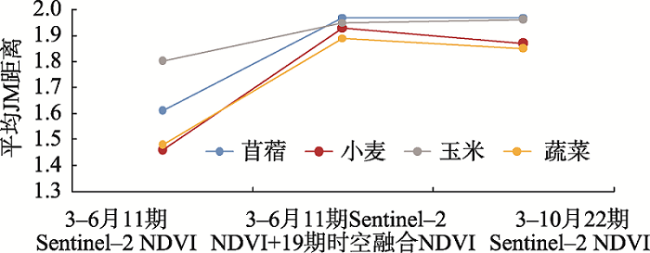
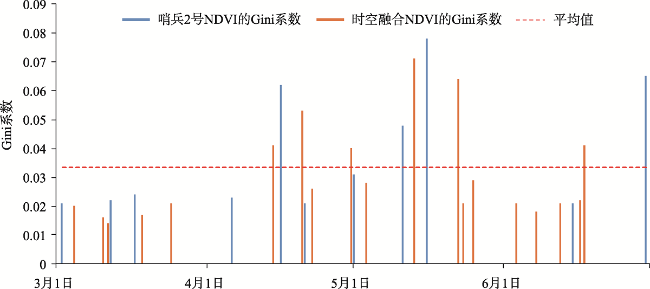
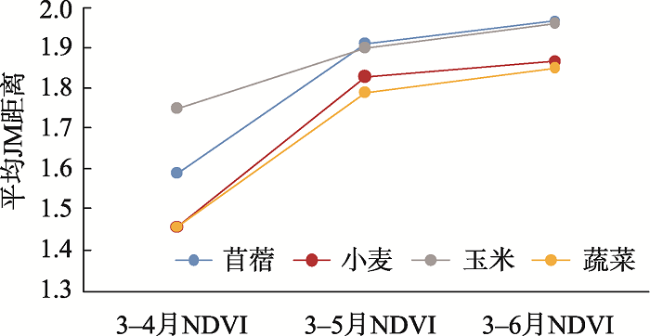
Obtaining the condition of crops in the early growing season is important for the agricultural water resources management, especially for water allocation in water shortage areas. In this paper, the Enhanced Spatiotemporal Adaptive Fusion Model (ESTARFM) was used to fuse Sentinel-2 NDVI data with NDVI data calculated from MOD09GQ in the early growing season in the middle reaches of the Heihe River basin from March to June to construct NDVI time series, and then the random forest classification method was used to identify the crop structure in 2019. By using the Sentinel-2 NDVI time series and spatiotemporal fused NDVI time series jointly in the early growing season (i.e., from March to June), the crop classification accuracy reached 91.42 % with a kappa coefficient of 0.85. Compared with the classification results obtained using only Sentinel-2 NDVI time series, the accuracy improved by 1.01 % and the kappa coefficient improved by 0.02. The accuracy was only 1.53 % lower and the kappa coefficient was only 0.03 lower than the results obtained using Sentinel-2 NDVI time series in the whole crop growth period (from March to October). The Gini coefficient was used to evaluate the feature importance of the time series constructed by combining the Sentinel-2 NDVI time series and fused NDVI series. It was found that six of the 10 NDVI images with Gini coefficient scores higher than the average were spatiotemporally fused images, indicating that the NDVI data obtained by spatiotemporal fusion could improve the classification accuracy. The NDVI time series of different lengths were also established separately for early identification of crop structures. Results show that early identification of alfalfa and corn can be achieved as early as mid-April and late April, respectively. In addition, the classification accuracy of corn was strongly influenced by the length of NDVI time series, and early identification of corn can be achieved in late May.
YANG Zehang , WANG Wen , BAO Jianxiong . Identifying Crop Types in Early Growing Season in the Middle Reaches of Heihe River by Fusing Multi-Source Remote Sensing Data[J]. Journal of Geo-information Science, 2022 , 24(5) : 996 -1008 . DOI: 10.12082/dqxxkx.2022.210527
表2 黑河流域中游地区2019年Sentinel-2与MOD19GQ影像数据Tab. 2 Sentinel-2 and MOD19GQ image data from the middle reaches of the Heihe River Basin in 2019 |
| 数据类型 | 成像时间 | ||||||
|---|---|---|---|---|---|---|---|
| Sentinel-2 | 上半年 | 3月2日 | 3月12日 | 3月17日 | 4月6日 | 4月16日 | 4月21日 |
| 5月1日 | 5月11日 | 5月16日 | 6月15日 | 6月30日 | |||
| 下半年 | 7月5日 | 7月15日 | 7月25日 | 7月30日 | 8月4日 | 8月14日 | |
| 9月3日 | 9月23日 | 9月28日 | 10月18日 | 10月28日 | |||
| MOD09GQ | 上半年 | 3月2日 | 3月4日 | 3月10日 | 3月11日 | 3月12日 | 3月17日 |
| 3月18日 | 3月24日 | 4月6日 | 4月14日 | 4月16日 | 4月20日 | ||
| 4月21日 | 4月22日 | 4月30日 | 5月1日 | 5月3日 | 5月11日 | ||
| 5月12日 | 5月13日 | 5月16日 | 5月22日 | 5月23日 | 5月25日 | ||
| 6月3日 | 6月7日 | 6月15日 | 6月16日 | 6月17日 | 6月30日 | ||
表3 需进行去云处理的数据Tab. 3 Data to be de-clouded |
| 数据类型 | 有云日期 | |||||||
|---|---|---|---|---|---|---|---|---|
| Sentinel-2 | 上半年 | 3月17日 | 4月6日 | 5月1日 | 5月11日 | 5月16日 | 6月15日 | 6月30日 |
| 下半年 | 7月15日 | 8月4日 | 9月3日 | 9月23日 | 10月18日 | |||
| MOD19GQ | 上半年 | 3月17日 | 4月6日 | 4月20日 | 4月22日 | 4月30日 | 5月1日 | 5月3日 |
| 5月11日 | 5月12日 | 5月16日 | 5月23日 | 6月7日 | 6月15日 | 6月16日 | ||
| 6月17日 | 6月30日 | |||||||
表4 黑河中游地区2019年基于不同NDVI时间序列作物分类精度比较Tab. 4 Comparison of crop classification accuracy based on different NDVI time series in the middle reaches of Heihe River in 2019 |
| 作物类别 | 3—6月11期NDVISen | 3—6月11期NDVISen+8期NDVIFUS | 3—10月22期NDVISen | |||||
|---|---|---|---|---|---|---|---|---|
| 用户精度/% | 制图精度/% | 用户精度/% | 制图精度/% | 用户精度/% | 制图精度/% | |||
| 苜蓿 | 98.84 | 91.20 | 99.48 | 91.26 | 98.99 | 94.65 | ||
| 小麦 | 76.67 | 86.07 | 80.17 | 90.44 | 80.01 | 88.23 | ||
| 玉米 | 88.50 | 97.20 | 88.67 | 98.44 | 91.80 | 98.47 | ||
| 蔬菜 | 70.61 | 43.03 | 80.99 | 43.33 | 83.79 | 49.85 | ||
| 总体精度/% | 90.37 | 91.42 | 92.95 | |||||
| kappa系数 | 0.83 | 0.85 | 0.88 | |||||
表5 不同长度NDVI时间序列作物分类精度对比Tab. 5 Comparison of crop classification accuracy in NDVI time series of different lengths |
| 作物类别 | 3—4月15期NDVISen | 3—-5月24期NDVISen | 3—6月30期NDVISen | |||||
|---|---|---|---|---|---|---|---|---|
| 用户精度/% | 制图精度/% | 用户精度/% | 制图精度/% | 用户精度/% | 制图精度/% | |||
| 苜蓿 | 97.49 | 91.40 | 99.45 | 90.15 | 99.48 | 91.26 | ||
| 小麦 | 72.57 | 88.27 | 80.10 | 87.93 | 80.97 | 90.46 | ||
| 玉米 | 88.49 | 97.56 | 87.78 | 98.63 | 88.67 | 98.44 | ||
| 蔬菜 | 66.91 | 28.65 | 82.99 | 41.49 | 80.99 | 43.33 | ||
| 总体精度/% | 89.22 | 90.92 | 91.42 | |||||
| kappa系数 | 0.81 | 0.82 | 0.85 | |||||
表6 不同长度NDVI时间序列的作物精度提取结果对比Tab. 6 Comparison of crop precision extraction results with different length NDVI time series |
| 时间序列 | 玉米 | 苜蓿 | 小麦 | 总体精度/% | Kappa 系数 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| 用户精度/% | 制图精度/% | 用户精度/% | 制图精度/% | 用户精度/% | 制图精度/% | |||||
| 3月—4月6日 | 83.07 | 79.08 | 85.78 | 77.91 | 65.80 | 58.20 | 78.72 | 0.72 | ||
| 3月—4月20日 | 85.98 | 86.89 | 93.42 | 89.68 | 71.23 | 76.13 | 86.12 | 0.79 | ||
| 3月—4月30日 | 88.49 | 97.56 | 97.49 | 91.40 | 72.57 | 88.27 | 89.22 | 0.81 | ||
| 3月—5月3日 | 88.33 | 98.62 | 97.29 | 91.39 | 73.97 | 87.39 | 89.72 | 0.82 | ||
| 3月—5月16日 | 88.52 | 98.66 | 97.13 | 91.79 | 78.67 | 87.33 | 89.94 | 0.82 | ||
| 3月—5月25日 | 87.78 | 98.63 | 99.45 | 90.15 | 80.10 | 87.93 | 90.92 | 0.82 | ||
| [1] |
欧阳玲, 毛德华, 王宗明, 等. 基于GF-1与Landsat8 OLI影像的作物种植结构与产量分析[J]. 农业工程学报, 2017, 33(11):147-156.
[
|
| [2] |
曹卫彬, 杨邦杰, 宋金鹏. TM影像中基于光谱特征的棉花识别模型[J]. 农业工程学报, 2004, 20(4):112-116.
[
|
| [3] |
|
| [4] |
胡琼, 吴文斌, 宋茜, 等. 农作物种植结构遥感提取研究进展[J]. 中国农业科学, 2015, 48(10):1900-1914.
[
|
| [5] |
边增淦, 王文, 江渊. 黑河流域中游地区作物种植结构的遥感提取[J]. 地球信息科学学报, 2019, 21(10):1629-1641.
[
|
| [6] |
|
| [7] |
|
| [8] |
郝鹏宇, 唐华俊, 陈仲新, 等. 基于历史增强型植被指数时序的农作物类型早期识别[J]. 农业工程学报, 2018, 34(13):179-186.
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
孙华生, 徐爱功, 林卉, 等. 时间序列植被指数频域滤波去噪算法的优化研究[J]. 遥感信息, 2013, 28(1):24-28.
[
|
| [17] |
程琳琳, 李玉虎, 孙海元, 等. 京津冀MODIS长时序增强型植被指数拟合重建方法适用性研究[J]. 农业工程学报, 2019, 35(11):148-158.
[
|
| [18] |
栗云峰. 基于时间序列高分一号影像的南京市农业用地提取方法研究[D]. 南京:南京大学, 2019.
[
|
| [19] |
|
| [20] |
杨振忠. 基于遥感数据的水稻生育期识别研究[D]. 武汉:武汉大学, 2019.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}