
Journal of Geo-information Science >
Enhanced Remote Sensing Image SRGAN Algorithm and Its Application in Improving the Accuracy of 3D Reconstruction
Received date: 2021-11-30
Revised date: 2022-03-07
Online published: 2022-10-25
Supported by
National Natural Science Foundation of China(42071340)
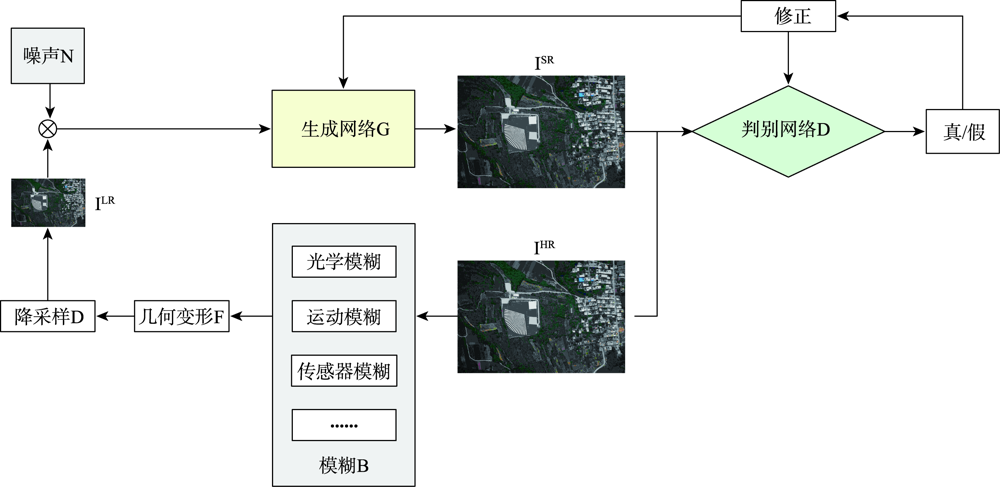
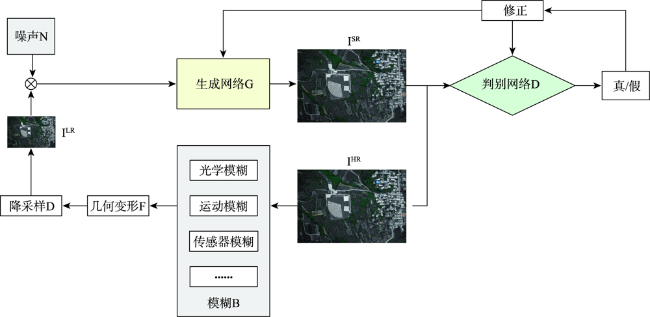
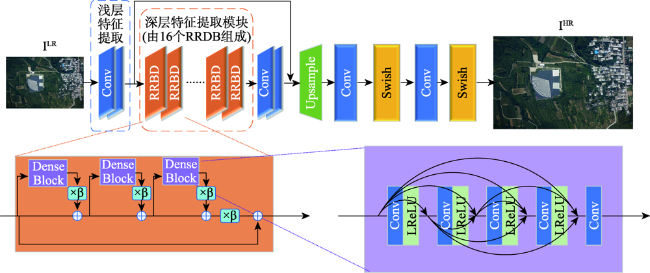
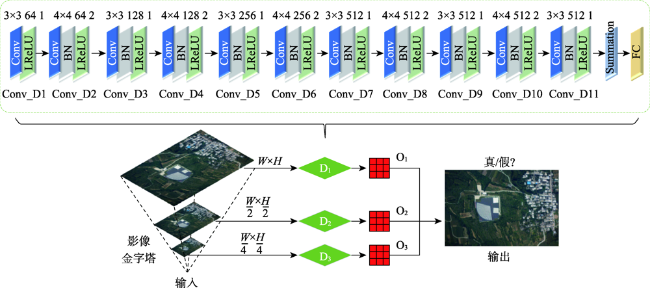
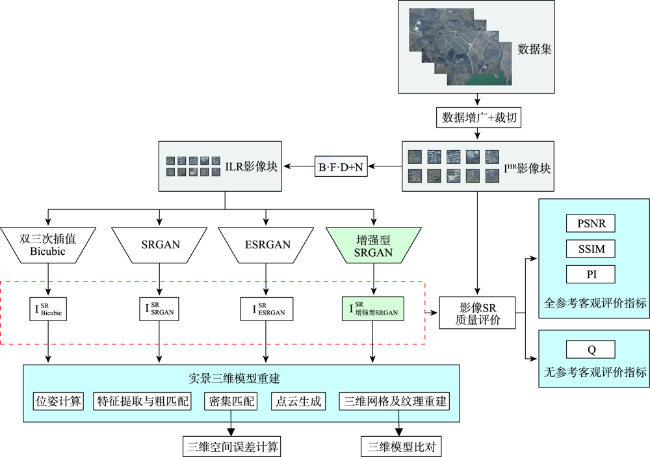
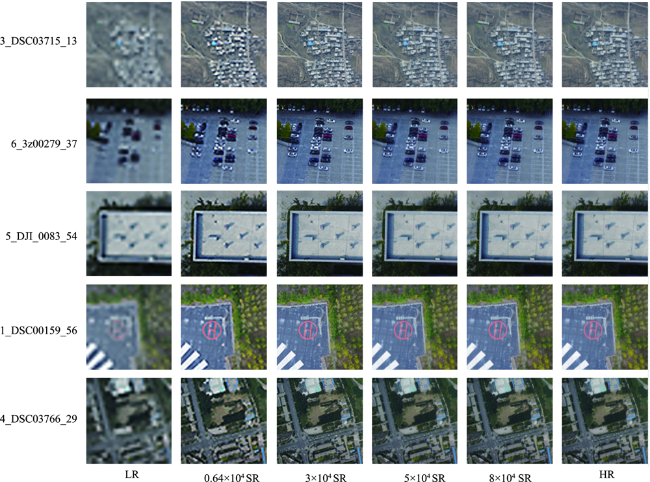
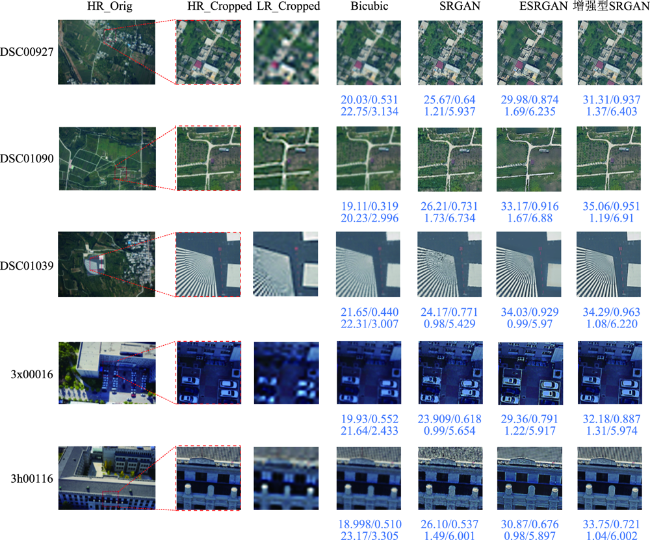
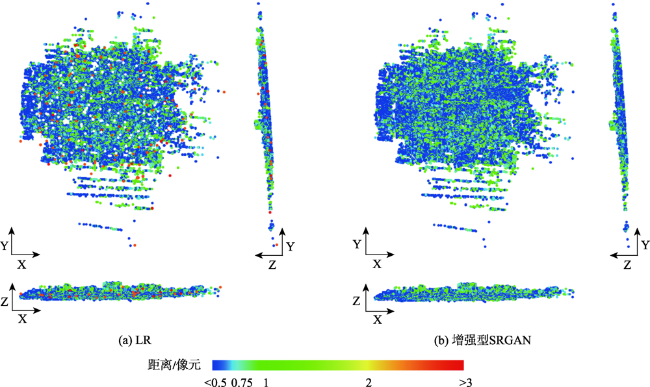
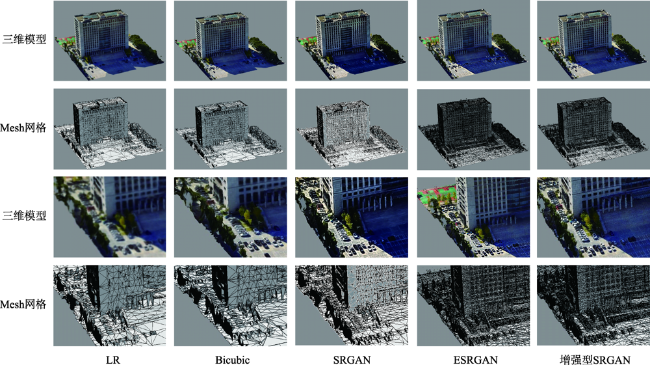
Remote sensing images are important data sources for terrain mapping, 3D reconstruction, and other tasks. The spatial resolution of remote sensing images determines the representation ability of the measured object on the image and plays an important role in the positioning accuracy and reconstruction effect of 3D model in the later stage. In view of the characteristics of high resolution remote sensing images including large scale, complex target features, and rich details, an enhanced SRGAN algorithm for remote sensing image reconstruction is proposed to meet the needs of 3D model reconstruction. The proposed algorithm overcomes the problems of edge effect and fuzzy reconstruction using traditional methods for super-resolution reconstruction. In traditional methods, there is limitation that simple convolutional networks can only extract the shallow feature information of the image and cannot retain the rich details of the image with the increasing resolution. The proposed algorithm is based on the generative adversarial networks using deep learning, in which dense residual blocks are used to extract deep features, and multi-scale discrimination is introduced into the discriminant model. In the training, the generation model and the discrimination model learn features together and are optimized to finally obtain a super-resolution reconstruction model suitable for remote sensing image application. This model can improve the resolution and image quality of remote sensing images, and ensure the integrity and accuracy of feature texture, detail information, and high-frequency target. In our study, the proposed algorithm is compared with the Bicubic, SRGAN, and ESRGAN algorithms. Our results show that the PSNR of the proposed algorithm is improved by about three units, the Penetration Index (PI) is stable and closer to one, and the SSIM and clarity index Q are also improved. In 3D reconstruction, the number of image dense matching points is increased, and the error is reduced. The measured point values of the model are closer to the measured point values from the field. The visual perception of the model is also more real and delicate, which indicates that the precision and positioning accuracy of the 3D model can be significantly improved using the remote sensing images constructed by the proposed algorithm. The results demonstrate the proposed algorithm that considers the characteristics of remote sensing images performs better than other algorithms for the super-resolution reconstruction, and the geometric accuracy and visual accuracy of the real 3D models based on the constructed images are also significantly improved.
MIN Jie , ZHANG Yongsheng , YU Ying , LV Kefeng , WANG Ziquan , ZHANG Lei . Enhanced Remote Sensing Image SRGAN Algorithm and Its Application in Improving the Accuracy of 3D Reconstruction[J]. Journal of Geo-information Science, 2022 , 24(8) : 1631 -1644 . DOI: 10.12082/dqxxkx.2022.210766
表1 实验环境配置Tab. 1 Experimental environment configuration |
| 软硬件名称 | 参数及信息 |
|---|---|
| CPU | Intel® Core™i9 1100K @3.70GHz |
| GPU | Intel(R) UHD Graphics (Driver: 27.20.100.9168)NVIDIA GeForce RTX 3080 (Driver: 27.21.14.6192) |
| RAM | 32 GB |
| 系统配置 | Ubuntu 18.04 LTS Windows 10 |
| 程序语言 | Python 3.7.0 |
| 底层框架 | PyTorch 1.4.0 |
| 模型重建软件 | Pix4D, Context Capture |
表2 SR重建训练与验证实验数据集Tab. 2 SR reconstruction training and validation experimental datasets |
| 数据集 | 指标 | 内容 | 展示图 |
|---|---|---|---|
| 数据集1 | 时间 | 2014年夏季5月 |  |
| 覆盖区域 | 登封嵩山遥感卫星定标场 | ||
| 影像数量/幅 | 176 | ||
| 飞行航高/m | 200 | ||
| 镜头焦距/mm | 15 | ||
| 传感器大小/mm | 23.52×15.68 | ||
| 影像分辨率(尺寸)/像素 | 6000×4000 | ||
| 影像像素大小/um | 3.92 | ||
| 数据集2 | 时间 | 2017年夏季9月 |  |
| 覆盖区域 | 登封雪沟及其周边地区 | ||
| 影像数量/幅 | 191 | ||
| 飞行航高/m | 1220 | ||
| 镜头焦距/mm | 35 | ||
| 传感器大小/mm | 35.00×23.35 | ||
| 影像分辨率(尺寸)/像素 | 7952×5304 | ||
| 影像像素大小/um | 4.40 | ||
| 数据集3 | 时间 | 2017年冬季12月 |  |
| 覆盖区域 | 登封雪沟及其周边地区 | ||
| 影像数量/幅 | 206 | ||
| 飞行航高/m | 1255 | ||
| 镜头焦距/mm | 35 | ||
| 传感器大小/mm | 35.00×23.35 | ||
| 影像分辨率(尺寸)/像素 | 7952×5304 | ||
| 影像像素大小/um | 4.40 | ||
| 数据集4 | 时间 | 2018年夏季5月 |  |
| 覆盖区域 | 郑州市某校区 | ||
| 影像数量/幅 | 55 | ||
| 飞行航高/m | 90 | ||
| 镜头焦距/mm | 35 | ||
| 传感器大小/mm | 36×24 | ||
| 影像分辨率(尺寸)/像素 | 6000×4000 | ||
| 影像像素大小/um | 6.00 | ||
| 数据集5 | 时间 | 2016年夏季9月 |  |
| 覆盖区域 | 郑州市某独立建筑 | ||
| 影像数量/幅 | 496 | ||
| 飞行航高/m | 90 | ||
| 镜头焦距/mm | 3.5 | ||
| 传感器大小/mm | 6.32×4.74 | ||
| 影像分辨率(尺寸)/像素 | 4000×3000 | ||
| 影像像素大小/um | 1.58 | ||
| 数据集6 | 时间 | 2021年秋季10月 |  |
| 覆盖区域 | 沈阳市某校区 | ||
| 影像数量/幅 | 390×5 | ||
| 飞行航高/m | 153 | ||
| 镜头焦距/mm | 下视25,前后左右侧视35 | ||
| 传感器大小/mm | 下视30.78×20.52,前后左右侧视42.81×28.54 | ||
| 影像分辨率(尺寸)/像素 | 6000×4000 | ||
| 影像像素大小/um | 下视5.13,前后左右侧视7.14 |
表3 4种SR算法评价指标数值(均值)对比Tab. 3 Comparison of evaluation index values (mean value) of each of the four SR algorithm |
| 算法 | Bicubic[20] | SRGAN[14] | ESRGAN[15] | 增强型SRGAN | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 评价指标 | 放大因子 | DF1000 | DB_x | DB_q | DF1000 | DB_x | DB_q | DF1000 | DB_x | DB_q | DF1000 | DB_x | DB_q |
| PSNR | ×2 | 20.32 | 21.07 | 20.97 | 25.47 | 29.17 | 26.64 | 25.39 | 28.01 | 28.13 | 25.43 | 28.14 | 29.43 |
| ×4 | 23.14 | 26.21 | 24.32 | 31.02 | 29.95 | 28.46 | 30.34 | 34.96 | 34.11 | 30.78 | 35.07 | 34.11 | |
| SSIM | ×2 | 0.53 | 0.48 | 0.43 | 0.51 | 0.63 | 0.52 | 0.62 | 0.69 | 0.70 | 0.69 | 0.72 | 0.71 |
| ×4 | 0.56 | 0.66 | 0.70 | 0.90 | 0.78 | 0.78 | 0.86 | 0.87 | 0.84 | 0.89 | 0.90 | 0.89 | |
| PI | ×2 | 23.87 | 22.67 | 23.71 | 1.48 | 0.67 | 0.55 | 1.36 | 1.14 | 1.09 | 1.31 | 1.07 | 1.11 |
| ×4 | 25.56 | 23.47 | 27.32 | 1.66 | 0.48 | 0.61 | 1.23 | 1.27 | 1.10 | 1.19 | 1.21 | 1.09 | |
| Q | ×2 | 4.13 | 4.07 | 4.00 | 5.44 | 5.37 | 5.80 | 5.89 | 6.12 | 5.88 | 5.91 | 6.18 | 5.92 |
| ×4 | 4.34 | 3.98 | 4.03 | 5.69 | 5.72 | 5.75 | 6.00 | 6.03 | 6.11 | 6.12 | 6.29 | 6.22 | |
表4 各SR算法密集匹配对比Tab. 4 Comparison of dense matching of various SR algorithms |
| 指标 | LR | Bicubic | SRGAN | ESRGAN | 增强型SRGAN |
|---|---|---|---|---|---|
| 连接点的数量/个 | 183 348 | 198 627 | 313 914 | 353 418 | 340 024 |
| 每个连接点影像覆盖中位数 | 3 | 3 | 3 | 3 | 3 |
| 每幅影像上匹配连接点中位数 | 396 | 429 | 678 | 791 | 734 |
| 重投影误差中值 | 1.68 | 1.44 | 0.72 | 0.891 | 0.41 |
| 重投影均方误差 | 1.60 | 1.53 | 1.03 | 1.00 | 0.62 |
| 投影射线的均方误差 | 0.01380 | 0.00921 | 0.00748 | 0.00803 | 0.00247 |
表5 各SR算法三维模型重建点位精度对比Tab. 5 Comparison table of 3D model reconstruction point accuracy of each SR algorithm |
| HR | Bicubic | SRGAN | ESRGAN | 增强型SRGAN | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| P1 | (391.44, 437.50, 54.74) | (387.41, 429.37, 51.09) | (388.37, 435.42, 50.97) | (392.49, 435.55, 51.92) | (390.47, 436.01, 55.91) | ||||||||||
| P2 | (414.69, 681.50, 61.82) | (416.78, 688.79, 58.79) | (419.03, 678.69, 57.64) | (413.04, 683.93, 63.87) | (415.81, 682.47, 60.01) | ||||||||||
| P3 | (267.69, 381.00, 57.34) | (263.14, 377.35, 60.19) | (264.83, 385.01, 60.03) | (265.97, 383.71, 55.46) | (266.03, 382.64, 59.43) | ||||||||||
| P4 | (293.63, 541.52, 54.28) | (296.19, 537.99, 47.39) | (297.97, 543.979, 50.97) | (291.68, 539.98, 51.49) | (294.84, 543.87, 51.86) | ||||||||||
| P5 | (352.19, 466.13, 118.53) | (353.46, 469.37, 108.42) | (350.29, 462.18, 112.49) | (354.40, 464.71, 115.51) | (350.97, 467.71, 120.03) | ||||||||||
| △X | △Y | △Z | △X | △Y | △Z | △X | △Y | △Z | △X | △Y | △Z | ||||
| 平均误差 | 2.90 | 5.17 | 5.31 | 3.30 | 3.06 | 4.00 | 1.72 | 2.01 | 2.51 | 1.24 | 1.61 | 1.80 | |||
| 最大误差 | 4.03 | 8.13 | 10.11 | 4.34 | 4.01 | 6.04 | 2.21 | 2.71 | 3.02 | 1.67 | 2.35 | 2.42 | |||
注:△X,△Y,△Z为当前算法在该方向上的误差。 |
| [1] |
张春森, 张卫龙, 郭丙轩, 等. 倾斜影像的三维纹理快速重建[J]. 测绘学报, 2015, 44(7):782-790.
[
|
| [2] |
王冬, 丁奥, 施银迪, 等. 基于倾斜摄影测量的油库精细三维建模方法研究[J]. 测绘与空间地理信息, 2021, 44(5):8-11,16.
[
|
| [3] |
|
| [4] |
李德仁, 肖雄武, 郭丙轩, 等. 倾斜影像自动空三及其在城市真三维模型重建中的应用[J]. 武汉大学学报·信息科学版, 2016, 41(6):711-721.
[
|
| [5] |
|
| [6] |
|
| [7] |
肖雄武, 李德仁, 郭丙轩, 等. 一种具有视点不变性的倾斜影像快速匹配方法[J]. 武汉大学学报·信息科学版, 2016, 41(9):1151-1159.
[
|
| [8] |
李德仁, 袁修孝. 误差处理与可靠性理论:第2版[M]武汉大学出版社, 2012:44-62.
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
李欣, 韦宏卫, 张洪群. 结合深度学习的单幅遥感图像超分辨率重建[J]. 中国图象图形学报, 2018, 23(2):209-218.
[
|
| [13] |
|
| [14] |
唐艳秋, 潘泓, 朱亚平, 等. 图像超分辨率重建研究综述[J]. 电子学报, 2020, 48(7):1407-1420.
[
|
| [15] |
|
| [16] |
|
| [17] |
毕晓君, 潘梦迪. 基于生成对抗网络的机载遥感图像超分辨率重建[J]. 智能系统学报, 2020, 15(1):74-83.
[
|
| [18] |
|
| [19] |
|
| [20] |
范冲, 龚健雅, 朱建军, 等. ALOS-PRISM遥感影像超分辨率重建[J]. 遥感学报, 2009, 13(1):75-82.
[
|
| [21] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}