
Journal of Geo-information Science >
Harbor Detection based on Multi-Source Data and Semantic Modeling of Ship Stop Trajectory
Received date: 2021-08-21
Revised date: 2021-10-27
Online published: 2022-11-25
Supported by
The Fundamental Research Funds for the Central Universities(2022-11242)
National Natural Science Foundation of China(41971335)
National Natural Science Foundation of China(51978144)
A Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions.
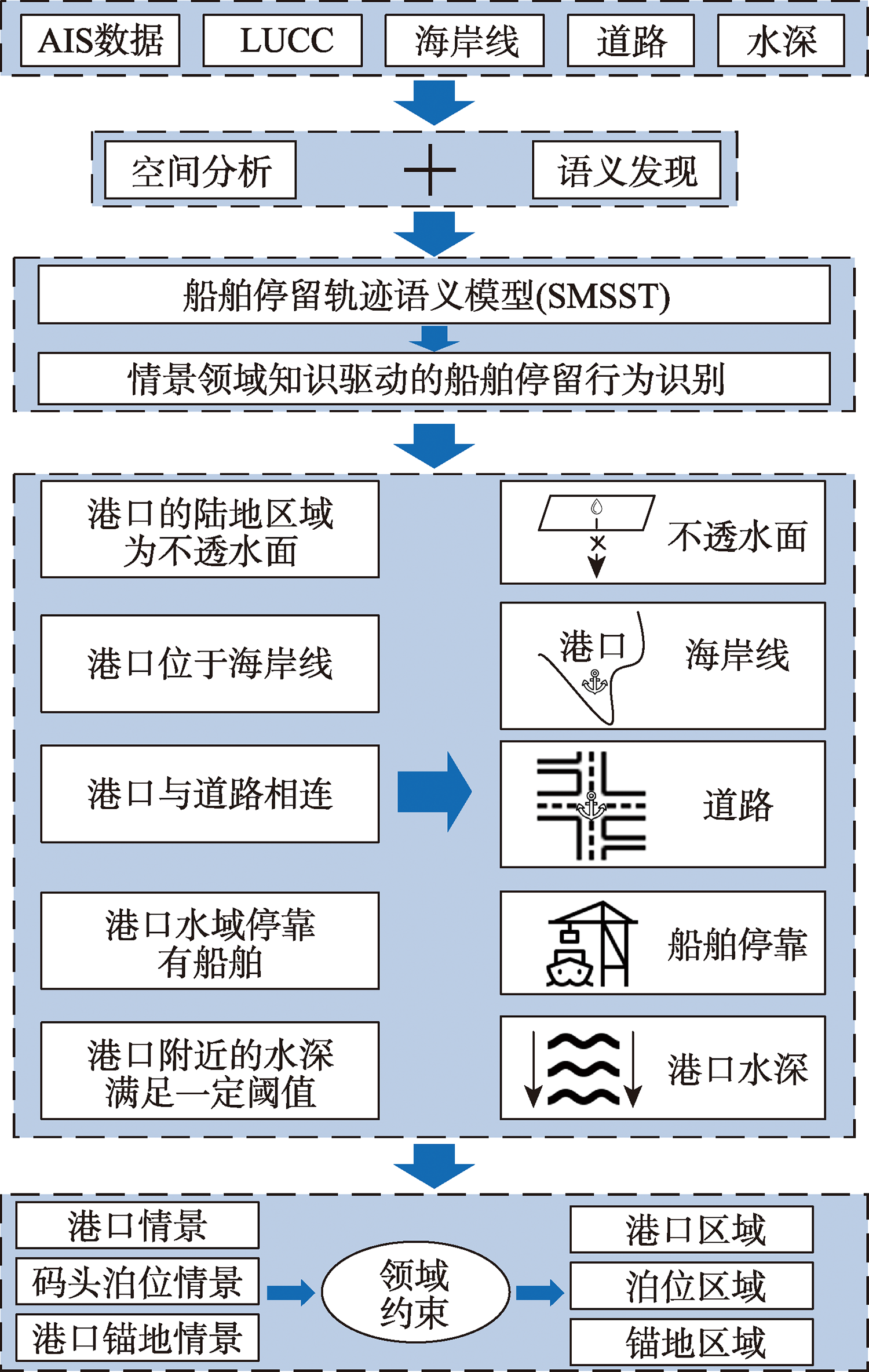
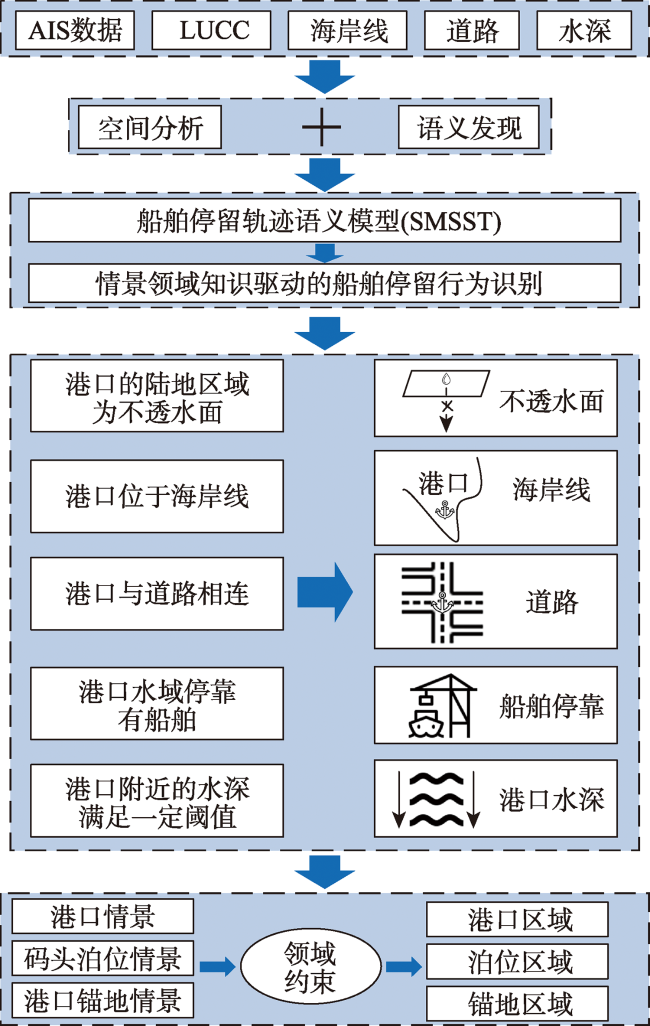
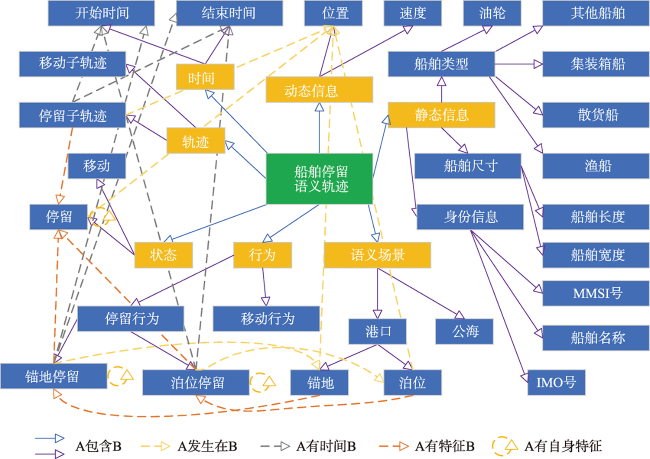
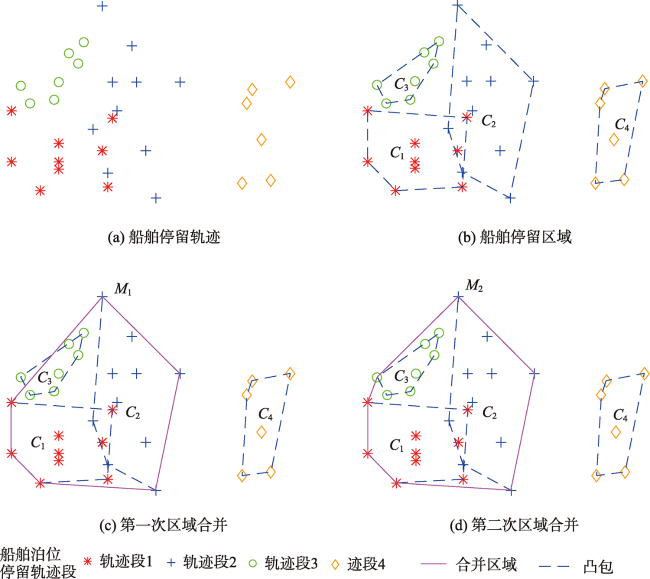
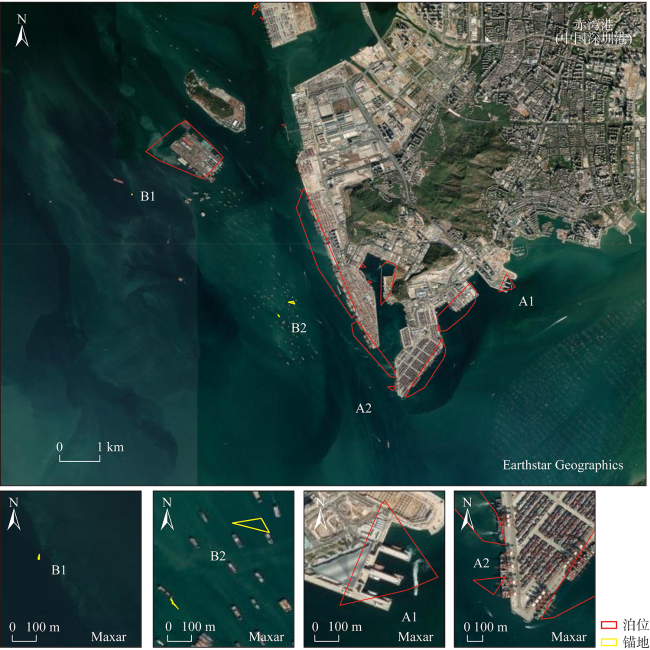
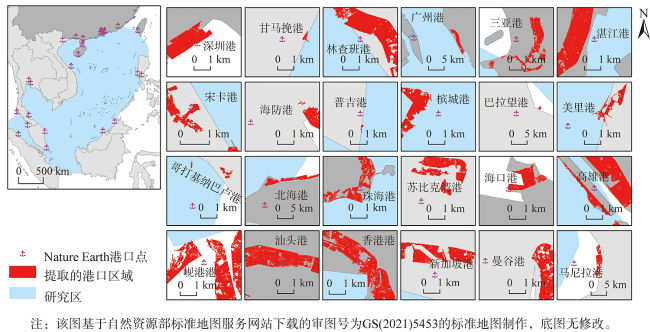
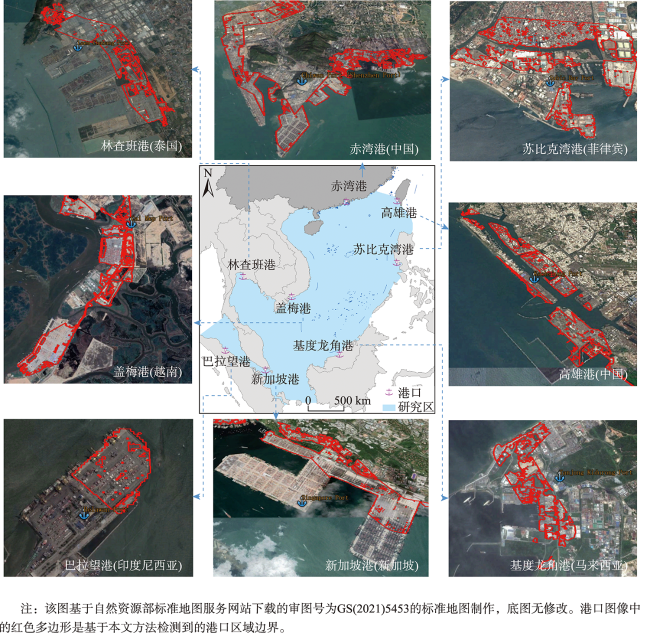
Harbor detection is the top priority of maritime ship supervision, and the ship activity information acquired by Automatic Identification System (AIS) can provide high temporal and spatial accuracy of ship activity information for harbor detection. In order to explore the application of AIS data in harbor detection, a harbor detection method based on multi-source data and semantic modeling of ship stop trajectory is proposed. Firstly, the semantic model of ship stop trajectory is constructed through data mining and semantic information enhancement to identify ship stop trajectory in the harbor area. Secondly, a classification model based on random forest is established to classify ship berthing trajectories and ship anchoring trajectories, and then harbor berths and anchorages are extracted by using spatial step-by-step merging method. Finally, the data of ship berthing trajectories, roads, coastline, bathymetry, and land use and land cover data are integrated to identify harbor objects considering situational-domain knowledge. Based on over 83 million AIS trajectory records of 96,790 ships in 2017, the proposed method is applied to detect harbor object in the South China Sea study area. The experimental results show that the overall classification accuracy of ship stop behavior is 0.9477 and the Kappa coefficient is 0.8948. 447 harbor areas in the South China Sea study area are extracted, and the overlay verification results with Google Earth images show that the extraction results are all located within the real harbor images. In addition, compared with the 24 harbor locations in the South China Sea region contained in the Natural Earth dataset, the integrity of the extraction results is greatly enhanced. Therefore, the harbor detection method based on multi-source data and semantic modeling of ship stop trajectory has high accuracy and completeness for harbor detection. Meanwhile, the harbor areas extracted by this method can provide target areas for harbor identification based on remote sensing images, thus improving the efficiency of dynamic identification of harbor object in a large region or even globally.
YAN Zhaojin , YANG Hui . Harbor Detection based on Multi-Source Data and Semantic Modeling of Ship Stop Trajectory[J]. Journal of Geo-information Science, 2022 , 24(9) : 1662 -1675 . DOI: 10.12082/dqxxkx.2022.210471
表1 研究数据概述Tab. 1 An overview of the research data |
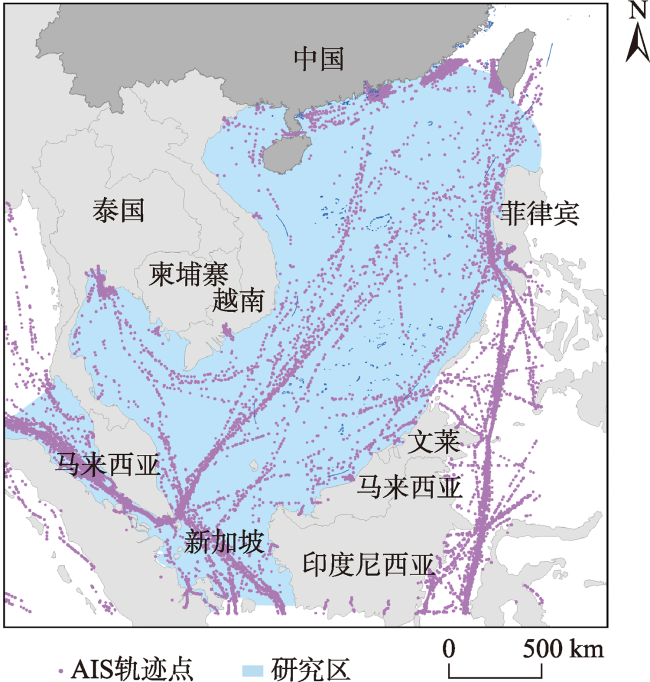
图4 南海区域研究区与AIS数据示例注:该图基于自然资源部标准地图服务网站下载的审图号为GS(2021)5453的标准地图制作,底图无修改。 Fig. 4 Example of South China Sea regional study area and AIS data |
表2 集装箱船AIS轨迹记录示例Tab. 2 Example of real AIS trajectory recording of a container ship whose MMSI is 565229000, and named SIMA SAPPHIRE |
| MMSI号 | 船舶名称 | 船舶类型 | 船舶长度/m | 船舶宽度/m | 经度/° | 纬度/° | 对地航速/节 | 对地航向/° | UTC时间 |
|---|---|---|---|---|---|---|---|---|---|
| 565229000 | SIMA SAPPHIRE | 集装箱船 | 170 | 25 | 100.76 | 13.12 | 0.1 | 340 | 2017-07-03/00:20:27 |
| 565229000 | SIMA SAPPHIRE | 集装箱船 | 170 | 25 | 100.76 | 13.12 | 0 | 195 | 2017-07-03/01:29:27 |
| 565229000 | SIMA SAPPHIRE | 集装箱船 | 170 | 25 | 100.76 | 13.12 | 0 | 357 | 2017-07-03/02:32:26 |
| 565229000 | SIMA SAPPHIRE | 集装箱船 | 170 | 25 | 100.76 | 13.11 | 7.2 | 219 | 2017-07-03/03:16:04 |
| 565229000 | SIMA SAPPHIRE | 集装箱船 | 170 | 25 | 100.74 | 13.03 | 14.9 | 175 | 2017-07-03/03:38:00 |
| 565229000 | SIMA SAPPHIRE | 集装箱船 | 170 | 25 | 100.74 | 12.87 | 14.7 | 180 | 2017-07-03/04:16:11 |
| 565229000 | SIMA SAPPHIRE | 集装箱船 | 170 | 25 | 100.73 | 12.76 | 14.8 | 187 | 2017-07-03/04:44:05 |
| 565229000 | SIMA SAPPHIRE | 集装箱船 | 170 | 25 | 100.76 | 12.63 | 15.2 | 142 | 2017-07-03/05:16:11 |
| 565229000 | SIMA SAPPHIRE | 集装箱船 | 170 | 25 | 100.81 | 12.53 | 15.1 | 151 | 2017-07-03/05:44:05 |
| 565229000 | SIMA SAPPHIRE | 集装箱船 | 170 | 25 | 100.90 | 12.42 | 15.3 | 141 | 2017-07-03/06:16:12 |
注:示例船舶MMSI为565229000,船名为SIMA SAPPHIRE。 |
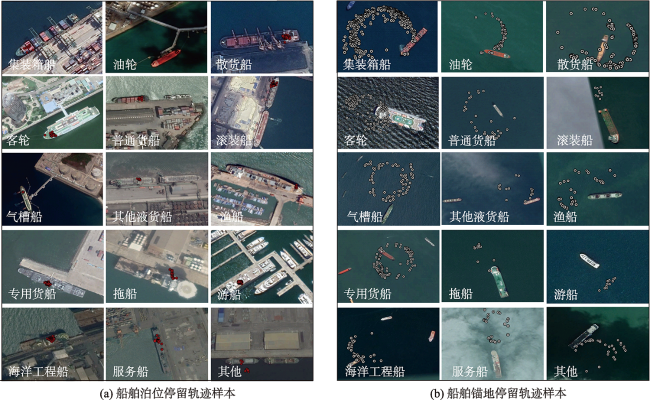
图6 不同类型船舶的泊位停留轨迹样本和锚地停留轨迹样本Fig. 6 Examples of ship berthing trajectory samples and ship anchoring trajectory samples for different types of ships |
表3 不同类型船舶停留轨迹样本统计Tab. 3 Sample statistics for different types of vessel stop trajectories (个) |
| 样本类型 | 船舶类型 | 合计 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | ||
| 泊位停留 | 174 | 176 | 177 | 35 | 91 | 46 | 44 | 44 | 46 | 48 | 43 | 41 | 40 | 33 | 42 | 1080 |
| 锚地停留 | 151 | 140 | 127 | 43 | 79 | 31 | 35 | 36 | 44 | 40 | 43 | 45 | 42 | 39 | 40 | 935 |
| 合计 | 325 | 316 | 304 | 78 | 170 | 77 | 79 | 80 | 90 | 88 | 86 | 86 | 82 | 72 | 82 | 2015 |
注:编号1—15分别表示集装箱船、油轮、散货船、客轮、普通货船、滚装船、气槽船、其他液货船、渔船、专用货船、拖船、游船、海洋工程船、服务船、其他。 |
表4 基于随机森林算法的船舶停留轨迹分类统计Tab. 4 Classification accuracy of ship stop trajectory based on random forest algorithm |
| 船舶停留轨迹 | 船舶停留轨迹分类验证精度 | ||
|---|---|---|---|
| 样本数量/个 | 2015 | 总体精度 | 0.9477 |
| 训练集/个 | 1612 | 泊位停留识别精度 | 0.9561 |
| 验证集/个 | 403 | 锚地停留识别精度 | 0.9352 |
| 训练:验证 | 8:2 | Kappa系数 | 0.8948 |
| [1] |
|
| [2] |
|
| [3] |
陈仁丽, 王宜强, 刘柏静, 等. 基于GIS和AIS的渤海海上船舶活动时空特征分析[J]. 地理科学进展, 2020, 39(7):1172-1181.
[
|
| [4] |
|
| [5] |
李长安, 谢宗奎, 吴忠强, 等. 改进灰狼算法及其在港口泊位调度中的应用[J]. 哈尔滨工业大学学报, 2021, 53(1):101-108.
[
|
| [6] |
|
| [7] |
常莉莉, 王贤敏, 王春胜. 基于改进Faster R-CNN的码头自动识别[J/OL]. 遥感学报, 2021.
[
|
| [8] |
|
| [9] |
王金传, 谭喜成, 王召海, 等. 基于Faster R-CNN深度网络的遥感影像目标识别方法研究[J]. 地球信息科学学报, 2018, 20(10):1500-1508.
[
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
方志祥, 余红楚, 黄守倩. 海洋运输网络研究进展与趋势探讨[J]. 地球信息科学学报, 2018, 20(5):554-563.
[
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
GEBCO Compilation Group, GEBCO 2019 Grid[DB/OL]. 2019 [2020-10-25]. https://www.gebco.net/data_and_products/historical_data_sets/#gebco_2019
|
| [24] |
|
| [25] |
| [26] |
|
| [27] |
|
| [28] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}