
Journal of Geo-information Science >
A Research on Road Type Classification Considering the Multi-mode Features of Road Network and Trajectories
Received date: 2022-04-23
Revised date: 2022-05-27
Online published: 2022-12-25
Supported by
National Natural Science Foundation of China(41771474)
National Natural Science Foundation of China(42071432)
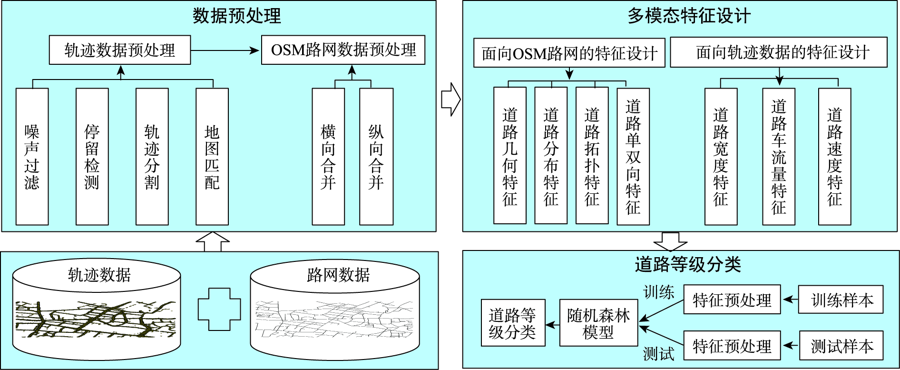
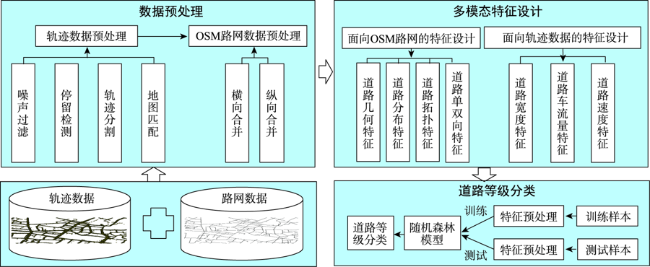
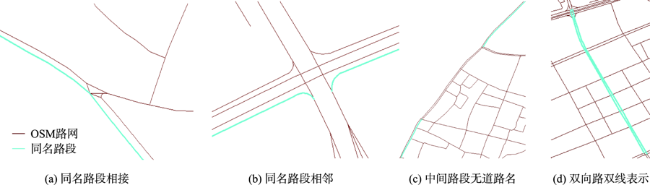
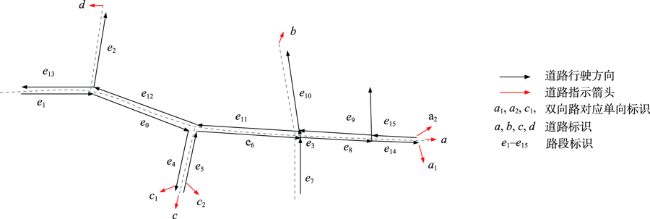
Path planning and vehicle navigation not only rely on the basic road network structure, but also need information such as grades to assist, to achieve navigation services such as "road priority". Road type is not only reflected in the static skeleton information of the road network, but also in the dynamic semantic information presented by the trajectories. To identify the missing road type of the road sections in the existing road network such as OpenStreetMap (OSM) and road network generation products, a road type classification method considering multi-mode features of the road network and trajectories was proposed. First, the connection between trajectory points and named roads was realized through the cleaning of trajectory data, map matching, and the merging of OSM based on names. Then, a set of descriptive features of road type was formed as the basis for identifying road type by taking the named road as the analytical unit. Specifically, based on the systematic analysis of the road geometric features, road distribution features, road topological features, and one-way and two-way information of the road network structure, we further mined and integrated the static and dynamic features of trajectories, such as width, traffic volume, speed, and so on. Finally, a Random Forest (RF) model was used as the base classifier for feature selection and model training to identify road type. In order to verify our proposed method, we selected the OSM road network and crowd-sourced trajectories in the Hanzheng Street area and the second ring area of Wuhan to carry out the experiment. Our method achieved excellent classification results, the accuracy in verification set of the small area on Hanzheng Street reached 91.2%, and the accuracy in verification set of the larger area on the second ring reached 80.8%. Compared with single-class features, integrated road network and trajectory features greatly improved the accuracy of road type identification. Compared with the road type classification in the form of the original road section, the road type identification in the form of road name reconstruction was better. Compared with existing methods, e.g., commonly used K-Nearest Neighbor (KNN), Support Vector Machine (SVM), Gaussian Naive Bayes (GNB), and other models, our proposed method achieved a higher accuracy. Feature rationality analysis also verified the effectiveness of the proposed method in this paper.
ZHANG Caili , XIANG Longgang , LI Yali , LIN Zhiyong . A Research on Road Type Classification Considering the Multi-mode Features of Road Network and Trajectories[J]. Journal of Geo-information Science, 2022 , 24(10) : 1925 -1940 . DOI: 10.12082/dqxxkx.2022.220218
表2 OSM路网等级重新分配Tab. 2 Road type redistribution of OSM |
| 等级ID | 新划分等级 | 释义 | OSM 对应原始等级 |
|---|---|---|---|
| 0 | fast | 城市环线,无红绿灯,立体交叉 | motorway, trunk |
| 1 | fast_link | 高架与地面的连接路 | motorway_link, trunk_link |
| 2 | primary | 城市主要行车道路 | primary |
| 3 | primary_link | 一般为左转、右转、提前掉头专用道 | primary_link |
| 4 | secondary | 连接主干路,兼有服务功能 | secondary |
| 5 | branch | 连接小区路、次干路,以服务功能为主 | tertiary, secondary_link, tertiary_link |
| 6 | service | 园区内部能够驾车的道路 | service, residential, living_street, unclassified |
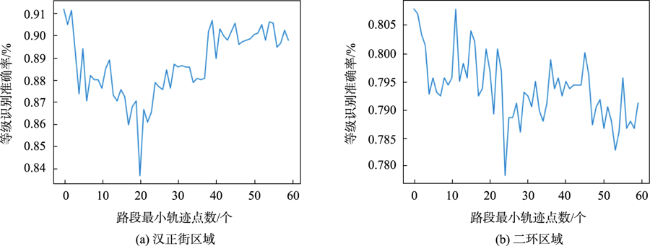
图6 不剔除轨迹点较少路段的等级识别准确率Fig. 6 Road type recognition accuracy that does not eliminate road segments with fewer trajectory points |
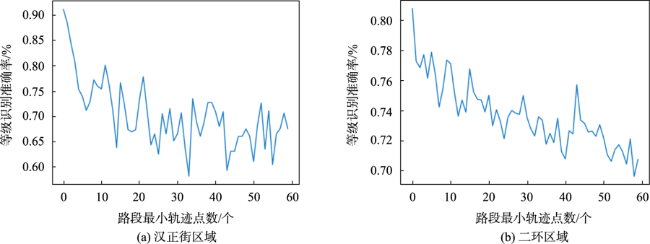
图7 剔除轨迹点较少路段的等级识别准确率Fig. 7 Road type recognition accuracy for eliminating road segments with fewer trajectory points |
表3 道路等级识别结果Tab. 3 Road type recognition results (%) |
| 等级ID | 等级类别 | 汉正街 | 二环区 | |||||
|---|---|---|---|---|---|---|---|---|
| 精确率 | 召回率 | F1值 | 精确率 | 召回率 | F1值 | |||
| 0 | fast | 80.6 | 100.0 | 89.3 | 65.4 | 59.7 | 62.4 | |
| 1 | fast_link | 100.0 | 100.0 | 100.0 | 77.7 | 87.2 | 82.2 | |
| 2 | primary | 100.0 | 67.5 | 80.6 | 61.0 | 67.5 | 64.1 | |
| 3 | primary_link | 100.0 | 75.0 | 85.7 | 64.8 | 74.7 | 69.4 | |
| 4 | secondary | 50.2 | 80.0 | 61.7 | 49.3 | 42.6 | 45.7 | |
| 5 | branch | 63.9 | 71.2 | 67.4 | 54.8 | 63.2 | 58.7 | |
| 6 | service | 98.1 | 95.1 | 96.6 | 94.8 | 89.6 | 92.1 | |
| 总体准确率 | 91.2 | 80.8 | ||||||
表4 本文方法消融实验结果Tab. 4 Ablation experimental results of the method in this paper (%) |
| 类别 | 原始路段 | 路名重构道路 | |||
|---|---|---|---|---|---|
| 汉正街 | 二环区 | 汉正街/ | 二环区 | ||
| OSMF | 83.7 | 69.5 | 90.4 | 77.0 | |
| TRIF | 64.7 | 58.0 | 79.1 | 64.3 | |
| OSMF+TRIF | 84.8 | 75.1 | 91.2 | 80.8 | |
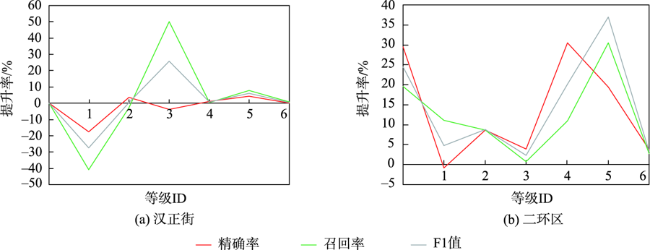
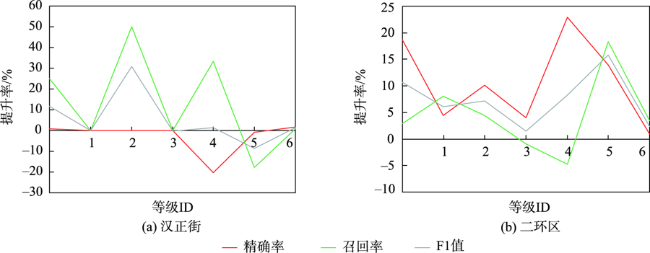
图8 路段形式在特征融合后不同等级分类指标提升率Fig. 8 The improvement rate of road type classification index after feature fusion in road section form |
表5 与其他分类模型及方法比较结果Tab. 5 Results compared with other classification models and methods |
| 模型 | 方法 | 原始路段 | 路名重构道路 | ||
|---|---|---|---|---|---|
| 汉正街/% | 二环区/% | 汉正街/% | 二环区/% | ||
| RF | 本文方法 | 84.8 | 75.1 | 91.2 | 80.8 |
| SVM | 文献[8]方法 | 68.4 | 56.4 | 76.9 | 60.1 |
| KNN | OSMF | 80.8 | 62.2 | 86.7 | 73.5 |
| TRIF | 60.7 | 48.6 | 76.1 | 49.5 | |
| OSMF+TRIF | 81.7 | 68.6 | 89.9 | 75.4 | |
| SVM | OSMF | 79.7 | 64.2 | 86.2 | 69.9 |
| TRIF | 66.4 | 56.3 | 76.2 | 60.4 | |
| OSMF+TRIF | 83.4 | 70.4 | 88.0 | 74.4 | |
| GNB | OSMF | 54.7 | 54.4 | 63.5 | 60.4 |
| TRIF | 51.6 | 57.0 | 57.1 | 42.3 | |
| OSMF+TRIF | 58.5 | 61.7 | 74.4 | 66.9 | |
表6 本文方法特征设计合理性分析Tab. 6 Feature design reasonability analysis of the method in this paper |
| 特征类别 | 汉正街/% | 二环区/% |
|---|---|---|
| 拓扑特征 | 79.1 | 70.4 |
| 拓扑特征+几何特征 | 81.7 | 78.0 |
| 拓扑特征+分布特征 | 86.0 | 79.6 |
| 拓扑特征+单双向 | 90.4 | 77.0 |
| 拓扑特征+宽度 | 92.6 | 78.3 |
| 拓扑特征+流量 | 91.5 | 80.0 |
| 拓扑特征+速度 | 91.2 | 80.8 |
表7 多模态特征统计信息Tab. 7 Multimodal feature statistics |
| 特征来源 | 特征类别 | 指标 | 含义 |
|---|---|---|---|
| 路网数据 | 道路几何特征 | Ldis | 道路几何长度 |
| RC | 道路弯曲度 | ||
| 道路分布特征 | NArea | 道路邻接网眼面积 | |
| pdens | 道路上n个节点密度平均值 | ||
| ldens | 道路上n-1个路段线密度平均值 | ||
| 道路拓扑特征 | LLCE、LLCD、LLCC、LLCB、LLPG | 从道路自身方面度量的节点群聚系数、度中心性、接近中心性、中介中心度、特征向量中心性 | |
| PCE、PCD、PCC、PCB、PPG | 从组成对象node方面度量的节点群聚系数、度中心性、接近中心性、中介中心度、特征向量中心性 | ||
| LCE、LCD、LCC、LCB、LPG | 从组成对象link方面度量的节点群聚系数、度中心性、接近中心性、中介中心度、特征向量中心性 | ||
| 轨迹数据 | 道路流量特征 | trinum | 道路所匹配的轨迹条数 |
| triTnum | 一条道路转向其他道路,或其他道路转向该道路的进出流量 | ||
| triSnum | 道路组成的路段单元间通过流量 | ||
| 道路单双向特征 | oneway | 道路的单双向信息 | |
| 道路宽度特征 | W | 道路匹配轨迹点到道路中心线距离的最大值与最小值之差 | |
| meanw0、modew0、stdw0、medianw0 | 道路匹配轨迹点到道路中心线距离绝对值的平均值、众数、标准差、中位数 | ||
| w5-w95 | 道路匹配轨迹点到道路中心线距离绝对值的5~90百分位 | ||
| 道路速度特征 | means0、modes0、stds0、medians0 | 道路匹配轨迹点速度的平均值、众数、标准差、中位数 | |
| s5-s95 | 道路匹配轨迹点速度的5~90百分位 |
:感谢武汉大学-华为空间信息技术创新实验室对本文提供资助。
| [1] |
|
| [2] |
|
| [3] |
李辉, 朱苗苗, 韩志玲, 等. 面向功能的城市道路等级结构分析及资源配置[J]. 公路, 2020, 65(7):6.
[
|
| [4] |
栾学晨, 杨必胜, 张云菲. 城市道路复杂网络结构化等级分析[J]. 武汉大学学报·信息科学版, 2012, 37(6):728-732.
[
|
| [5] |
|
| [6] |
|
| [7] |
马超. 自发地理信息道路数据融合处理关键技术研究[D]. 郑州: 解放军信息工程大学, 2017.
[
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
邓敏, 陈雪莹, 唐建波, 等. 一种顾及道路交通流量语义信息的路网选取方法[J]. 武汉大学学报·信息科学版, 2020, 45(9):1438-1447.
[
|
| [14] |
曹炜威, 张红, 何晶, 等. 顾及结构和几何特征的道路自动选取方法[J]. 武汉大学学报·信息科学版, 2017, 42(4):5.
[
|
| [15] |
韩远. 基于多属性决策层次分析法的道路选取方法[D]. 兰州: 兰州交通大学, 2020.
[
|
| [16] |
胡云岗, 陈军, 李志林, 等. 基于网眼密度的道路选取方法[J]. 测绘学报, 2007, 36(3):111-117.
[
|
| [17] |
施树明, 于壮, 林楠, 等. 面向汽车运行工况数据采集的道路等级K核划分方法[J]. 中国公路学报, 2016, 29(11):171-178.
[
|
| [18] |
|
| [19] |
袁林辉. 集成学习与多参数体系对OSM道路网自动选取的研究[D]. 南京: 南京大学, 2018.
[
|
| [20] |
|
| [21] |
|
| [22] |
向隆刚, 邵晓天. 载体轨迹停留信息提取的核密度法及其可视化[J]. 测绘学报, 2016, 45(9):1122-1131.
[
|
| [23] |
|
| [24] |
刘凯, 龚星星, 常四铁. 城市道路分级体系及相关因素研究[J]. 交通运输工程与信息学报, 2012, 10(4):7.
[
|
| [25] |
唐炉亮, 杨雪, 靳晨, 等. 基于约束高斯混合模型的车道信息获取[J]. 武汉大学学报·信息科学版, 2017, 42(3):341-347.
[
|
| [26] |
|
| [27] |
|
| [28] |
城市综合交通体系规划标准(GB/T51328-2018)[S]. 2018.
[ Standard for urban comprehensive transport system planning (GB/T51328-2018)[S]. 2018. ]
|
| [29] |
何云, 黄翀, 李贺, 等. 基于Sentinel-2A影像特征优选的随机森林土地覆盖分类[J]. 资源科学, 2019, 41(5):170-179.
[
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}