
Journal of Geo-information Science >
Close-Range Image Line Matching based on Mesh Descriptor and Homography Constraint
Received date: 2022-01-22
Revised date: 2022-02-25
Online published: 2023-01-25
Supported by
Natural Science Foundation of Jiangsu Province(BK20201372)
Open Fund of Key Laboratory of Urban Land and Resources Monitoring and Simulation,Ministry of Natural Resources(KF-2019-04-003)
National Natural Science Foundation of China(41631175)
National Natural Science Foundation of China(42071301)
A Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions(164320H116)
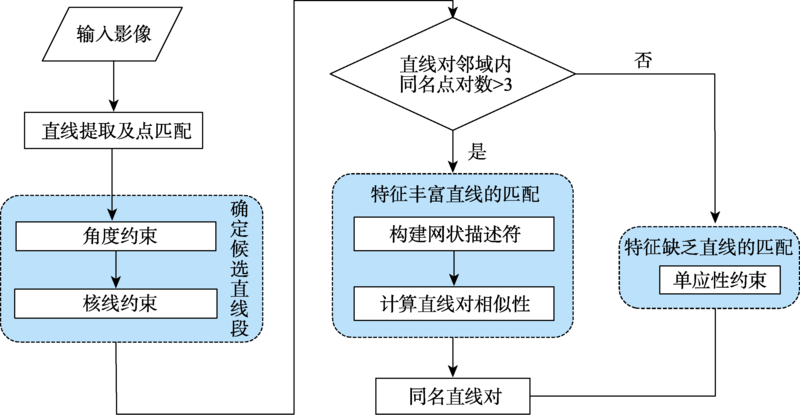
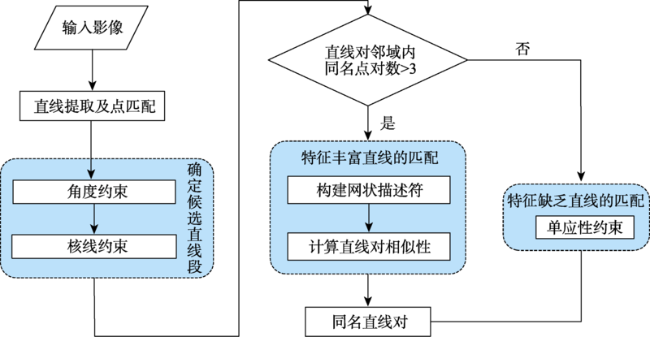
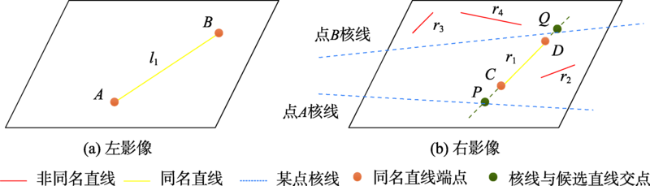
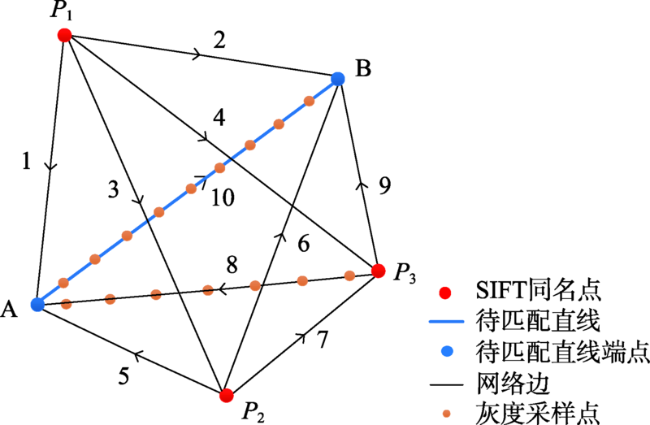
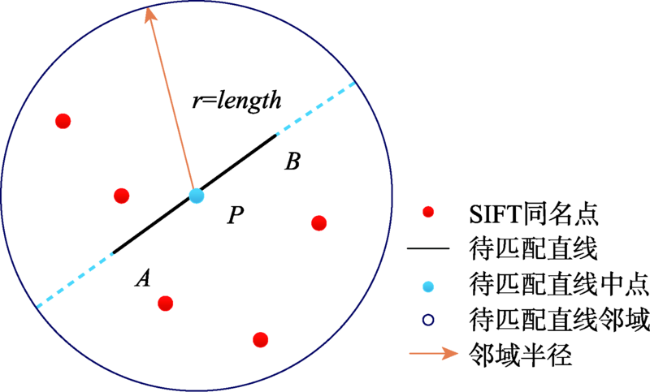
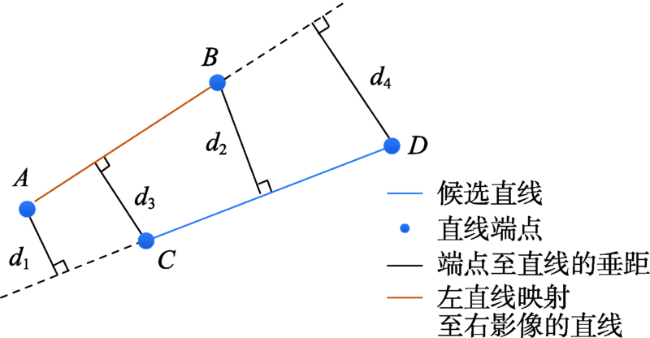
Aiming at the problem that the line descriptor in the existing stereo image line matching methods only depends on local gray features, resulting in weak reliability, a line matching method based on mesh descriptor and homography constraint is proposed in this study. Firstly, we extract line segments and the corresponding point pairs in reference image and search image using the Line Segment Detector (LSD) and Scale-Invariant Feature Transform ( SIFT) algorithms. And line segments that do not satisfy the length requirements to eliminate the noise caused by shadows or other ground objects are deleted. Secondly, after roughly estimating the rotation angle and homography matrix between the two images according to the obtained corresponding point pairs, the candidate lines are determined through the angle constraint and epipolar constraint, which can reduce the line search range in search image and exclude a large number of mismatches. In addition, the overlap between the reference line and the candidate line is calculated to ensure the consistency of the endpoints. Thirdly, a circular neighborhood using the midpoint of the line segment as the center and the length as the radius is constructed. The corresponding point pairs are searched in the neighborhood of the reference line and the candidate line to calculate the mesh descriptor. In order to improve the accuracy of line matching, for the line pairs whose number of corresponding point pairs is greater than three, we arbitrarily select three groups of different corresponding point pairs to calculate the line similarity value and take the maximum value as the final similarity of the line segment, so as to determine the corresponding line pair. Finally, the line segments that are not searched for the corresponding point pairs are mapped into the search image using the homography matrix. Three criteria are established according to the angle difference between the two lines and the vertical distance between the endpoints and the radiation information. Based on this, the final matching result is obtained, which can improve the number of corresponding line pairs. To verify the effectiveness and robustness of our algorithm, this paper selects five groups of close-range images in the international open standard test data set, and compares with three existing representative algorithms. The results show that the accuracy and effectiveness of our algorithm are higher than the other three algorithms. The matching accuracy and operation efficiency are improved by 16.1% and 49 times, respectively, and satisfactory line matching results can be obtained for close-range images under different conditions.
ZHANG Shan , ZHANG Ka , ZHAO Like , WANG Yujun , ZHANG Lunning , ZHOU Yaqin . Close-Range Image Line Matching based on Mesh Descriptor and Homography Constraint[J]. Journal of Geo-information Science, 2022 , 24(11) : 2186 -2197 . DOI: 10.12082/dqxxkx.2022.220041
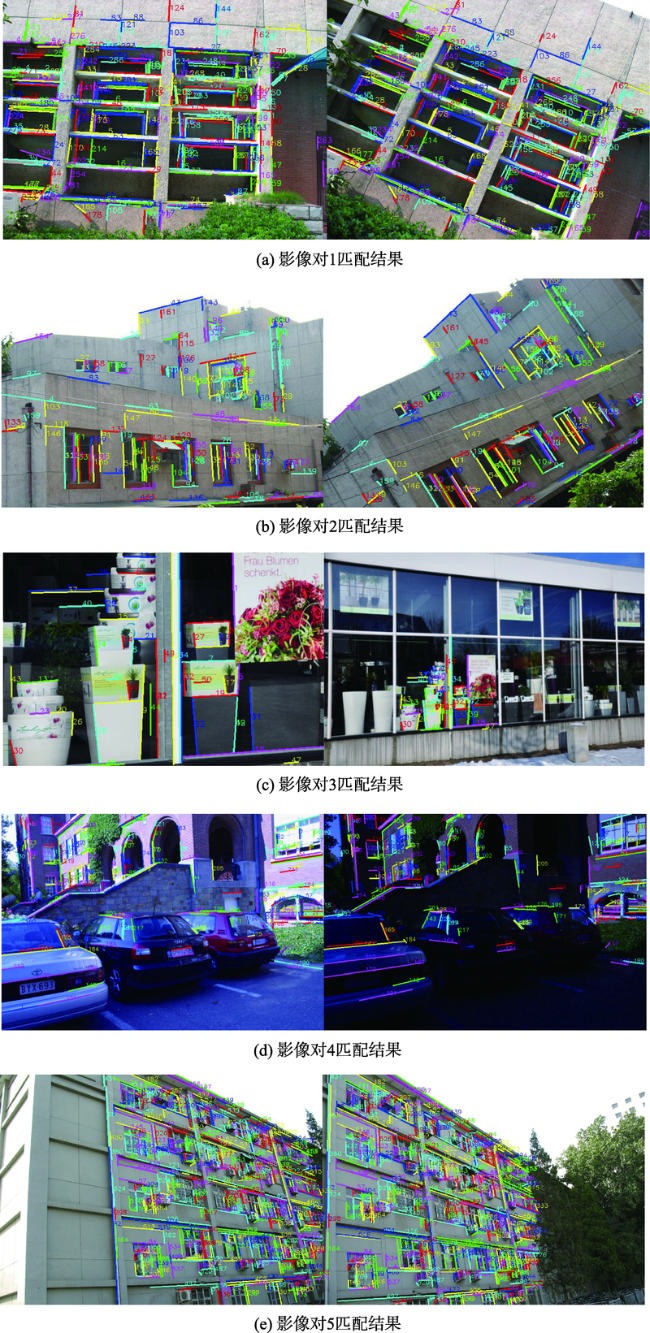
表1 不同算法匹配结果对比Tab. 1 Comparison of line matching results of different algorithms |
| 影像 | 提取直线数量(左,右)/条 | 算法名称 | 同名直线数/对 | 正确同名直线数/对 | 准确率/% | 运行时间/s |
|---|---|---|---|---|---|---|
| 6(a) | (538,556) | MSLD | 109 | 90 | 82.6 | 11.97 |
| LJL | 305 | 281 | 92.1 | 946.13 | ||
| LP | 285 | 275 | 96.5 | 42.77 | ||
| 本文算法 | 287 | 282 | 98.3 | 32.25 | ||
| 6(b) | (526,398) | MSLD | 158 | 139 | 88.0 | 8.76 |
| LJL | 159 | 145 | 91.2 | 450.30 | ||
| LP | 149 | 141 | 94.6 | 9.10 | ||
| 本文算法 | 164 | 157 | 95.7 | 29.13 | ||
| 6(c) | (374,681) | MSLD | 39 | 28 | 71.8 | 3.58 |
| LJL | 47 | 35 | 74.5 | 1193.85 | ||
| LP | 52 | 37 | 71.2 | 19.84 | ||
| 本文算法 | 51 | 43 | 84.3 | 23.58 | ||
| 6(d) | (971,504) | MSLD | 126 | 104 | 82.5 | 4.88 |
| LJL | 297 | 289 | 97.0 | 803.13 | ||
| LP | 219 | 212 | 96.8 | 30.47 | ||
| 本文算法 | 222 | 219 | 98.6 | 42.45 | ||
| 6(e) | (1071,1016) | MSLD | 165 | 149 | 90.3 | 31.75 |
| LJL | 533 | 499 | 93.6 | 1423.01 | ||
| LP | 550 | 518 | 94.2 | 20.16 | ||
| 本文算法 | 541 | 524 | 96.9 | 79.23 |
| [1] |
刘婉君. 一种基于几何约束和直线特征的目标跟踪算法[J]. 现代计算机, 2021(7):107-110.
[
|
| [2] |
行瑞星, 武芳, 巩现勇, 等. 建筑群组合直线模式识别的模板匹配方法[J]. 测绘学报, 2021, 50(6):800-811.
[
|
| [3] |
卢朝梁, 马丽华, 于敏, 等. 基于平行直线组的可见光与红外图像配准算法[J]. 解放军理工大学学报(自然科学版), 2015, 16(5):439-446.
[
|
| [4] |
曹林. 基于倾斜影像线特征的建筑物三维模型重建与优化方法研究[D]. 郑州: 战略支援部队信息工程大学, 2020.
[
|
| [5] |
何腕营, 王竞雪. 基于直线间几何属性特征相似性约束的组直线匹配算法[J]. 地球信息科学学报, 2020, 22(9):1766-1778.
[
|
| [6] |
梁艳, 盛业华, 张卡, 等. 利用局部仿射不变及核线约束的近景影像直线特征匹配[J]. 武汉大学学报(信息科学版), 2014, 39(2):229-233.
[
|
| [7] |
欧阳欢, 范大昭, 纪松, 等. 结合离散化描述与同名点约束的线特征匹配[J]. 测绘学报, 2018, 47(10):1361-1371.
[
|
| [8] |
[
|
| [9] |
余美. 倾斜立体影像匹配若干问题研究[J]. 测绘学报, 2021, 50(9):1278.
[
|
| [10] |
|
| [11] |
王竞雪, 何腕营. 多重约束条件下的LBD描述子与直线段匹配[J]. 中国图象图形学报, 2019, 24(2):237-247.
[
|
| [12] |
王竞雪, 崔昊. 局部点、线仿射不变性约束的近景影像直线段匹配[J]. 地球信息科学学报, 2019, 21(2):137-146.
[
|
| [13] |
张云生, 朱庆, 吴波, 等. 一种基于三角网约束的立体影像线特征多级匹配方法[J]. 武汉大学学报·信息科学版, 2013, 38(5):522-527.
[
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}