
Journal of Geo-information Science >
Ground Fissure Extraction Method based on Improved Active Contour Model for UAV Images in Mining Areas
Received date: 2022-06-02
Revised date: 2022-07-29
Online published: 2023-02-25
Supported by
Fundamental Research Funds for the Central Universities(2021YCPY0113)
National Natural Science Foundation of China(42271368)
National Natural Science Foundation of China(41701504)
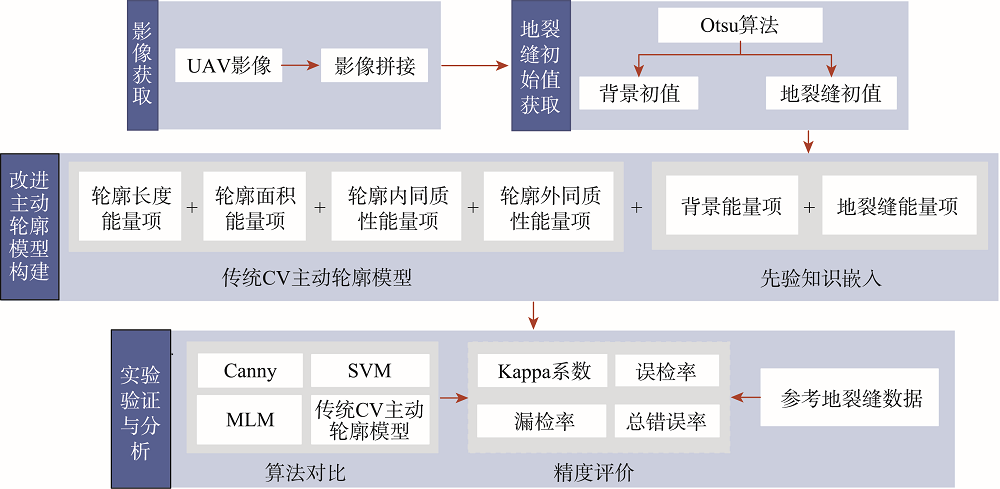
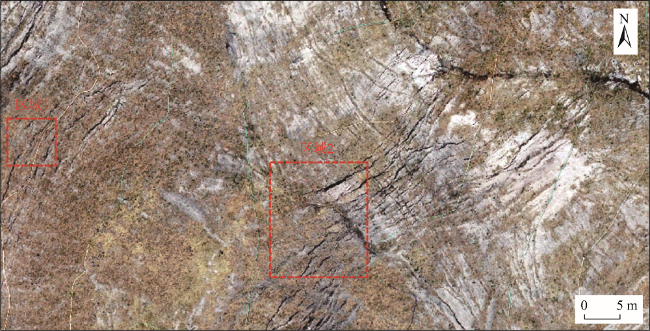
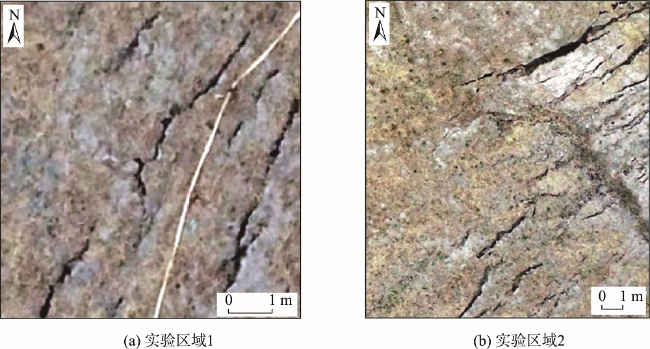
Accurate identification of ground fissures in mining areas is significant for disaster prevention, mitigation, and ecological environment restoration. In this study, a ground fissure extraction method is proposed based on the improved active contour model for UAV images in mining areas, aiming at accurately extracting ground fissures from high-resolution UAV images. Firstly, the Otsu algorithm was used to calculate the background and initial values of ground fissures as prior knowledge. Secondly, the extraction energy functions of the background and initial values of ground fissures were constructed and introduced into the traditional CV active contour model to enhance the pertinence of ground fissures extraction. Finally, ground fissures were extracted through the continuous evolution of the contour. Based on UAV images obtained in Dalai Nurg mining area, Inner Mongolia, the improved active contour model was used to extract ground fractures, and compared with traditional Canny edge detection algorithm, Support Vector Machine (SVM), Maximum Likelihood Method (MLM), and traditional CV active contour model methods for analysis and accuracy evaluation. The results show that the traditional Canny edge detection algorithm and traditional CV active contour model had the poor extraction in a small area with a single type of land cover. The improved active contour model, SVM, and MLM had achieved good results, and the improved active contour model method had the highest accuracy. In addition, in a large area with relatively complex land cover types, the traditional methods such as Canny edge detection algorithm, SVM, MLM, and CV active contour model had many omissions and errors, and the kappa coefficient was lower than 0.7. However, the improved active contour method still achieved better results, and the Kappa coefficient was about 0.9. Therefore, the proposed method could effectively improve the accuracy and stability of ground fissure extraction by introducing prior knowledge.
HAO Ming , LIN Huijing , GAO Yanyan . Ground Fissure Extraction Method based on Improved Active Contour Model for UAV Images in Mining Areas[J]. Journal of Geo-information Science, 2022 , 24(12) : 2448 -2457 . DOI: 10.12082/dqxxkx.2022.220376
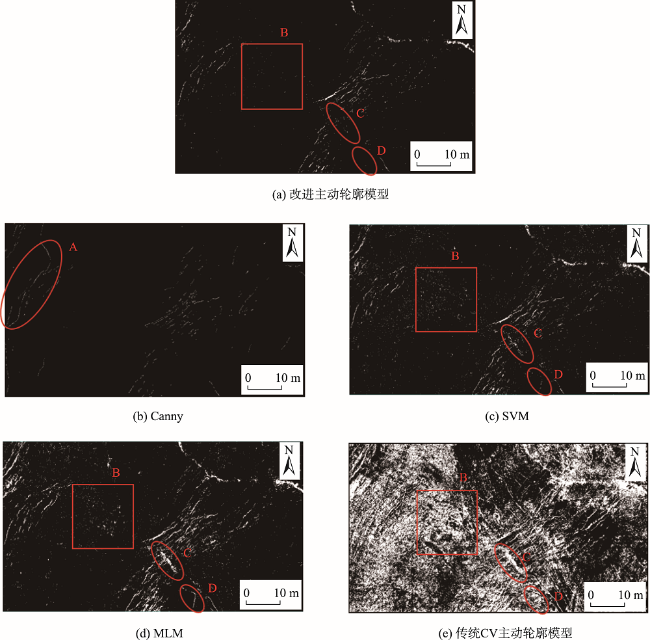
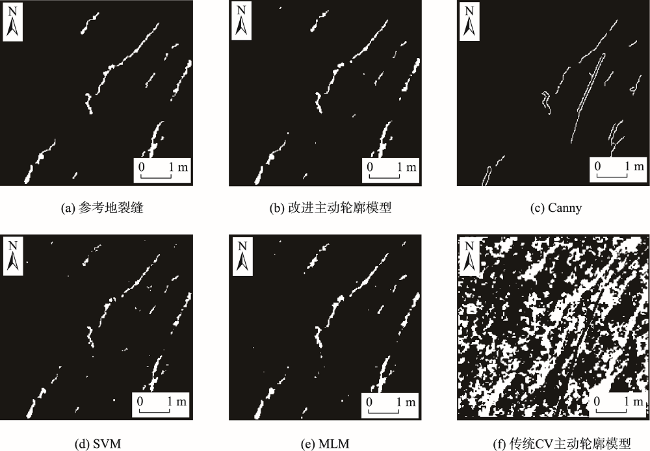
图5 实验区域1改进主动轮廓模型、传统的Canny边缘检测算法、SVM模型、MLM模型和传统CV主动轮廓模型地裂缝提取结果对比Fig. 5 Comparison of ground fissure extraction results between improved active contour model, traditional Canny edge detection algorithm, SVM model, MLM model and traditional CV active contour model in experimental area 1 |
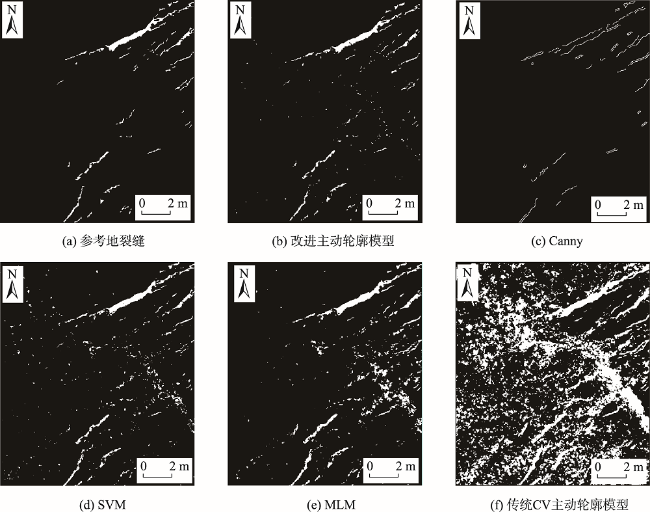
图6 实验区域2改进主动轮廓模型、传统的Canny边缘检测算法、SVM模型、MLM模型和传统CV主动轮廓模型地裂缝提取结果Fig. 6 Comparison of ground fissure extraction results between improved active contour model, traditional Canny edge detection algorithm, SVM model, MLM model and traditional CV active contour model in experimental area 2 |
表1 实验区域1精度评价结果Tab. 1 Accuracy evaluation results of experimental area 1 |
| 方法 | Kappa系数 | PMA/% | PFA/% | PTE/% |
|---|---|---|---|---|
| 改进主动轮廓模型 | 0.9335 | 8.1197 | 0.1331 | 0.3491 |
| SVM | 0.8497 | 20.4274 | 0.1972 | 0.7443 |
| MLM | 0.8469 | 8.2906 | 0.6653 | 0.8715 |
表2 实验区域2精度评价结果Tab. 2 Accuracy evaluation results of experimental area 2 |
| 方法 | Kappa系数 | PMA/% | PFA/% | PTE/% |
|---|---|---|---|---|
| 改进主动轮廓模型 | 0.8974 | 8.3941 | 0.2336 | 0.3915 |
| SVM | 0.6835 | 8.4683 | 1.4350 | 1.5679 |
| MLM | 0.5520 | 5.2433 | 2.7558 | 2.8034 |
| [1] |
赵红梅, 张发旺, 宋亚新, 等. 大柳塔采煤塌陷区土壤含水量的空间变异特征分析[J]. 地球信息科学学报, 2010, 12(6):753-760.
[
|
| [2] |
周颖, 刘彤. 基于计算机视觉的混凝土裂缝识别[J]. 同济大学学报(自然科学版), 2019, 47(9):1277-1285.
[
|
| [3] |
|
| [4] |
魏长婧, 汪云甲, 王坚, 等. 无人机影像提取矿区地裂缝信息技术研究[J]. 金属矿山, 2012, 41(10):90-92,96.
[
|
| [5] |
杨奇让, 胡振琪, 韩佳政, 等. 煤矿区无人机影像采动地裂缝提取方法研究[J/OL]. 煤炭科学技术, 2022:1-13.
[
|
| [6] |
陈超, 胡振琪. 我国采动地裂缝形成机理研究进展[J]. 煤炭学报, 2018, 43(3):810-823.
[
|
| [7] |
王臻, 王辉, 李国锋. 弱监督的无人机影像地裂缝自动提取[J]. 实验技术与管理, 2022, 39(3):51-56.
[
|
| [8] |
周英杰, 荆青青, 王晓红, 等. 山东省金属矿区地面裂缝现状遥感调查及趋势分析[J]. 矿产勘查, 2015, 6(5):642-646.
[
|
| [9] |
汪宝存. 郑州市地裂缝遥感识别与监测[J]. 测绘与空间地理信息, 2015, 38(10):64-69.
[
|
| [10] |
张兴航, 朱琳, 王威, 等. 基于对象的地裂缝分步提取方法研究与应用[J]. 国土资源遥感, 2019, 31(1):87-94.
[
|
| [11] |
汤伏全, 李林宽, 李小涛, 等. 基于无人机影像的采动地表裂缝特征研究[J]. 煤炭科学技术, 2020, 48(10):130-136.
[
|
| [12] |
鲁恒, 李永树, 林先成. 无人机高空间分辨率影像分类研究[J]. 测绘科学, 2011, 36(6):106-108.
[
|
| [13] |
李林宽. 基于无人机影像的煤矿区采动裂缝提取[D]. 西安: 西安科技大学, 2021.
[
|
| [14] |
熊婷, 贾春明, 妥军军, 等. 基于正演模拟的最大似然法火山岩有效裂缝识别及预测[J]. 特种油气藏, 2021, 28(5):30-36.
[
|
| [15] |
|
| [16] |
|
| [17] |
杜青松. 内蒙古扎赉诺尔煤矿环境保护与生态修复研究[J]. 环境生态学, 2020, 2(7):56-60,66.
[
|
| [18] |
王育光, 王诺, 李一依, 等. 扎赉诺尔露天煤矿排土场复垦与土壤微生物反馈响应[J/OL]. 环境工程, 2022:1-9.
[
|
| [19] |
杨朝云. 不同降雨条件下银山矿百岭湾排土场边坡稳定性分析[D]. 衡阳: 南华大学, 2019.
[
|
| [20] |
|
| [21] |
马国鑫. 基于无人机采集图像的建筑物表面裂缝检测方法研究[D]. 镇江: 江苏大学, 2018.
[
|
| [22] |
韦博文, 刘国祥, 汪致恒. 基于改进的MF-FDOG算法和无人机影像提取黄土地区地裂缝[J]. 测绘, 2018, 41(2):51-56,61.
[
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}