
Journal of Geo-information Science >
A Thinning Algorithm of Multibeam Sounding Data Considering Slope and Elevation
Received date: 2022-07-11
Revised date: 2022-10-09
Online published: 2023-03-25
Supported by
National Security Major Basic Research Project(613317)
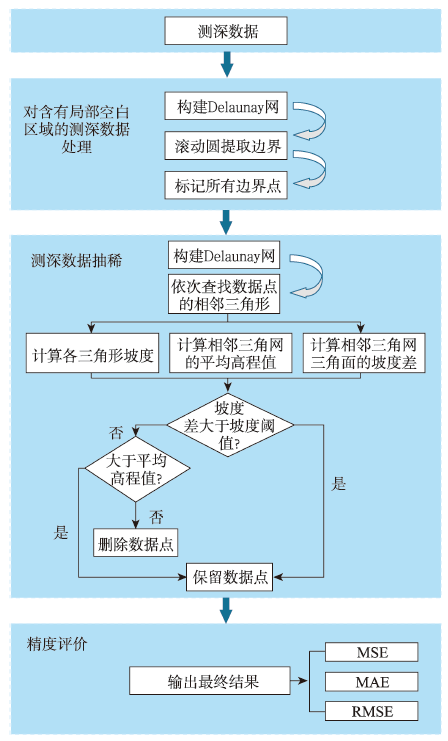
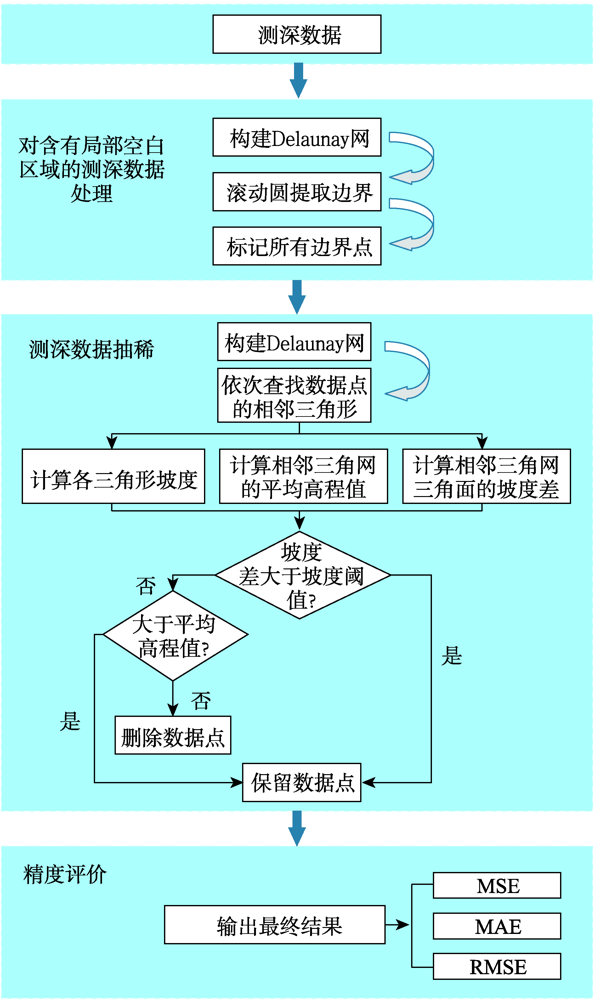
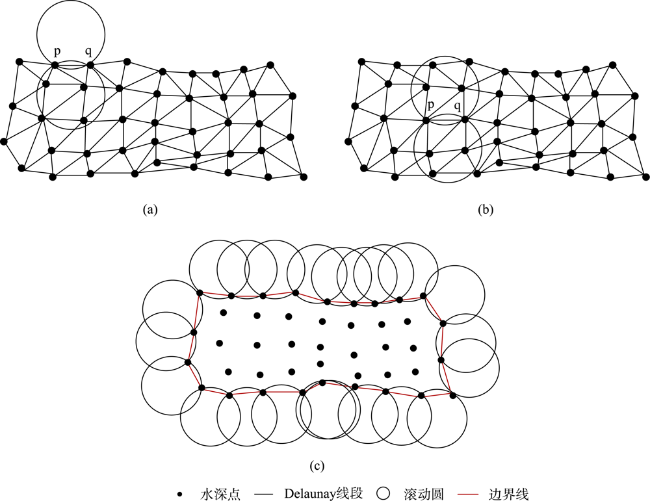
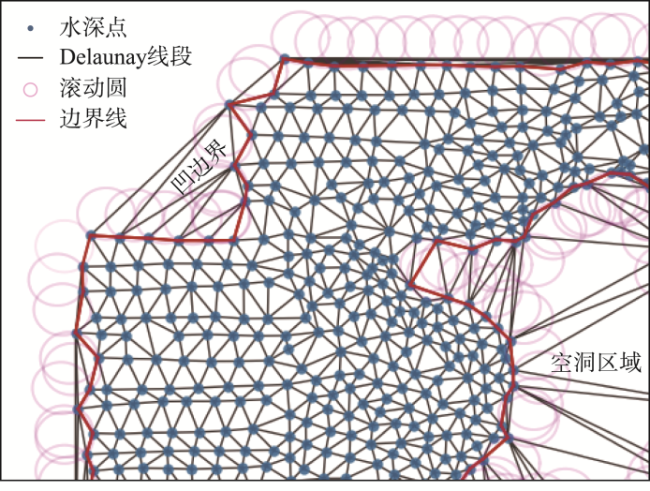
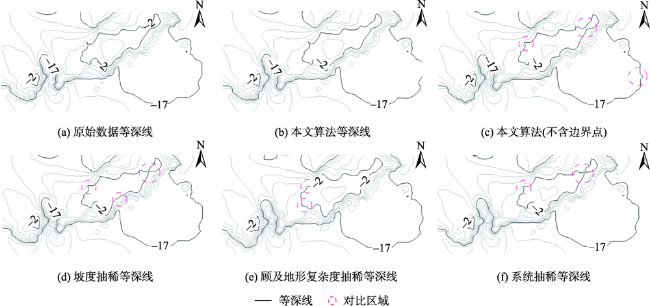
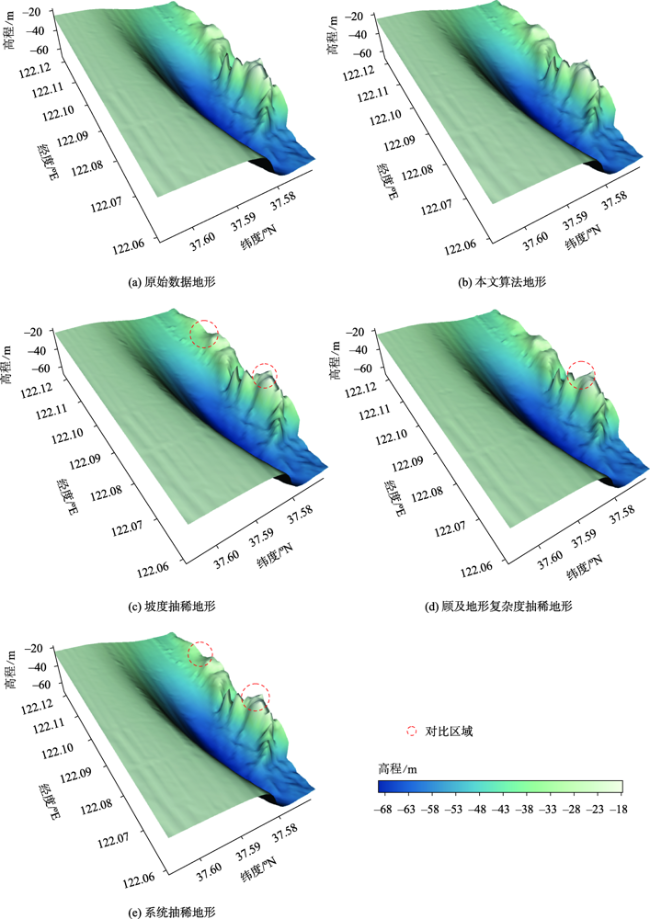
The submarine topographic data are important data source for marine scientific research and engineering construction. The bathymetric information, as the basic information of submarine topographic data, reflects the undulating changes of submarine topography. Therefore, how to effectively process bathymetric data has become a key research content of marine mapping. In order to solve the problem of data redundancy of massive multibeam bathymetry data, a multibeam bathymetry data thinning algorithm taking into account the slope and elevation is proposed, which can balance the accuracy of data thinning and the retaining of topographic feature points. Considering that the multibeam bathymetry data contain local blank areas such as cavities and concave boundaries, the Alpha Shape algorithm is first used to extract boundary points from the multibeam bathymetry data, so as to avoid the problem of losing terrain feature points due to thinning of the local bathymetry data blank areas. Then, a combination of slope and elevation thinning algorithms was used to delete redundant points and retain terrain feature points, and the boundary points of the thinned multibeam bathymetric data (containing local blank areas) are combined to obtain final thinning results. The accuracy is evaluated by using the checkpoint method. In the study area, the comparison experiments are carried out using the slope-based thinning, terrain complexity-based thinning, and system based thinning algorithms as references. The results show that: (1) The isobath derived from our proposed algorithm in the area containing local blank areas is closer to the isobath variation of the original bathymetric data compared to three reference thinning algorithms, and can more precisely express the fine features at the concave boundaries, hollows, and other areas and effectively maintain the morphological integrity of the seafloor topography; (2) The accuracy of the proposed algorithm is improved in different degrees compared with the reference thinning algorithms. Especially, as the thinning rate decreases, the Mean Square Error (MSE) of the proposed algorithm is decreased by 16%, 27%, 14%, and 10%, 36%, 2%, respectively in two kinds of terrain, and the Root Mean Square Error (RMSE) is decreased by 7%, 12%, 7% and 5%, 17%, 3% for two types of terrain, respectively, which demonstrates the effectiveness and generalizability of the proposed algorithm for thinning of multibeam bathymetric data in different types of terrains, improving the accuracy of bathymetric data thinning effectively, and meeting the needs of subsequent bathymetric data construction of high-precision seafloor topography.
QI Linjun , ZHAI Renjian , LI Anping . A Thinning Algorithm of Multibeam Sounding Data Considering Slope and Elevation[J]. Journal of Geo-information Science, 2023 , 25(1) : 142 -152 . DOI: 10.12082/dqxxkx.2023.220520
表1 测区A抽稀方法评估Tab. 1 Survey area A thinning method assessment |
| 数据源 | 抽稀率/% | 抽稀方法 | MSE | MAE | RMSE |
|---|---|---|---|---|---|
测区A | 92 | 本文算法 | 8.879 | 1.727 | 2.979 |
| 坡度抽稀法 | 9.261 | 1.794 | 3.043 | ||
| 顾及地形复杂度抽稀法 | 10.829 | 1.969 | 3.290 | ||
| 系统抽稀法 | 9.280 | 1.817 | 3.046 | ||
| 68 | 本文算法 | 9.395 | 1.738 | 3.065 | |
| 坡度抽稀法 | 10.940 | 1.957 | 3.307 | ||
| 顾及地形复杂度抽稀法 | 11.971 | 2.122 | 3.460 | ||
| 系统抽稀法 | 10.775 | 1.972 | 3.282 |
表2 测区B抽稀方法评估Tab. 2 Survey area B thinning method assessment |
| 数据源 | 抽稀率/% | 抽稀方法 | MSE | MAE | RMSE |
|---|---|---|---|---|---|
测区B | 85 | 本文算法 | 0.165 | 0.130 | 0.407 |
| 坡度抽稀法 | 0.173 | 0.128 | 0.416 | ||
| 顾及地形复杂度抽稀法 | 0.150 | 0.126 | 0.387 | ||
| 系统抽稀法 | 0.170 | 0.131 | 0.412 | ||
| 50 | 本文算法 | 0.235 | 0.172 | 0.483 | |
| 坡度抽稀法 | 0.260 | 0.168 | 0.510 | ||
| 顾及地形复杂度抽稀法 | 0.321 | 0.209 | 0.567 | ||
| 系统抽稀法 | 0.242 | 0.175 | 0.498 |
表3 水深值量化评价Tab. 3 Quantitative Evaluation of Water Depth Values |
| 数据源 | 类型 | 最小值/m | 最大值/m | 标准差 |
|---|---|---|---|---|
测区A | 原始数据 | -30.71 | -0.10 | 6.86 |
| 本文算法 | -28.91 | -0.24 | 6.22 | |
| 坡度抽稀法 | -27.12 | -0.24 | 6.08 | |
| 顾及地形复杂度抽稀法 | -26.69 | -0.35 | 6.02 | |
| 系统抽稀法 | -28.10 | -0.34 | 6.12 | |
测区B | 原始数据 | -69.44 | -20.60 | 13.41 |
| 本文算法 | -69.41 | -20.38 | 13.41 | |
| 坡度抽稀法 | -69.59 | -17.24 | 13.41 | |
| 顾及地形复杂度抽稀法 | -69.34 | -21.63 | 13.35 | |
| 系统抽稀法 | -69.40 | -16.91 | 13.42 |
| [1] |
赵建虎, 欧阳永忠, 王爱学. 海底地形测量技术现状及发展趋势[J]. 测绘学报, 2017, 46(10):1786-1794.
[
|
| [2] |
曹鸿博, 张立华, 朱穆华, 等. 海量多波束数据抽稀方法的比对分析[J]. 海洋测绘, 2010, 30(5):81-83.
[
|
| [3] |
钱金菊, 张昌赛, 王柯, 等. 机载LiDAR点云数据抽稀算法研究述评[J]. 测绘通报, 2017(S1):33-35,58.
[
|
| [4] |
|
| [5] |
缪志修, 齐华, 王国昌, 等. 基于机载LiDAR数据构建的DEM抽稀算法研究[J]. 铁道勘察, 2010, 36(4):35-40.
[
|
| [6] |
|
| [7] |
|
| [8] |
徐景中, 万幼川, 张圣望. LIDAR地面点云的简化方法研究[J]. 测绘信息与工程, 2008, 33(1):32-34.
[
|
| [9] |
刘春, 吴杭彬. 基于平面不规则三角网的DEM数据压缩与质量分析[J]. 中国图象图形学报, 2007, 12(5):836-840.
[
|
| [10] |
冯宇瀚, 殷晓冬, 王少帅, 等. 基于三角网构建海底DEM的抽稀算法[J]. 海洋测绘, 2012, 32(6):33-35,39.
[
|
| [11] |
曹文涛, 何伟. 利用TIN和高程梯度进行高程点抽稀[J]. 测绘通报, 2017(5):110-112.
[
|
| [12] |
马丹, 樊妙, 闫循鹏, 等. 一种改进的基于TIN的多波束测深数据抽稀算法[J]. 海洋技术学报, 2019, 38(5):49-54.
[
|
| [13] |
杨明军, 苏春梅, 康冰锋, 等. 平原地区机载激光雷达数据的抽稀算法分析[J]. 测绘通报, 2019(1):101-107.
[
|
| [14] |
|
| [15] |
程星会, 王明军, 翁敏, 等. 一种支持海量水深数据抽稀的边界提取方法[J]. 测绘地理信息, 2018, 43(4):108-110,115.
[
|
| [16] |
陶桐桐, 王明军, 杨龙, 等. 基于边界搜索的海量水深数据抽稀方法[J]. 测绘地理信息, 2018, 43(6):62-65.
[
|
| [17] |
文佳昕, 李靖涵, 行瑞星, 等. 顾及地形复杂度的多波束测深数据抽稀算法[J]. 测绘科学技术学报, 2018, 35(4):435-440.
[
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
夏伟, 黄谟涛, 刘雁春, 等. 多波束测深数据抽稀准则研究[J]. 测绘科学, 2010, 35(S1):17-19.
[
|
| [24] |
|
| [25] |
李振洪, 李鹏, 丁咚, 等. 全球高分辨率数字高程模型研究进展与展望[J]. 武汉大学学报·信息科学版, 2018, 43(12):1927-1942.
[
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
沈蔚, 李京, 陈云浩, 等. 基于LIDAR数据的建筑轮廓线提取及规则化算法研究[J]. 遥感学报, 2008, 12(5):692-698.
[
|
| [30] |
|
| [31] |
国家质量技术监督局. 海道测量规范: GB 12327-1998[S]. 北京: 中国标准出版社, 2004.
[State Bureau of Quality and Technical Supervision of the People's Republic of China. Specifications for hydrographic survey: GB 12327-1998[S]. Beijing: Standards Press of China, 2004. ]
|
| [32] |
廖中平, 陈立, 白慧鹏, 等. 自适应α-shapes平面点云边界提取方法[J]. 长沙理工大学学报(自然科学版), 2019, 16(2):15-21.
[
|
| [33] |
李世林, 李红军. 自适应步长的Alpha?shape表面重建算法[J]. 数据采集与处理, 2019, 34(3):491-499.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}