
Journal of Geo-information Science >
Research on Improved Ant Colony Algorithm for Mountain Hiking Emergency Rescue Path Planning
Received date: 2022-07-21
Revised date: 2022-09-19
Online published: 2023-03-25
Supported by
National Natural Science Foundation of China(32071776)
National Natural Science Foundation of China(41571490)
National Key Research and Development Programe of China(2022YFC3003000)
Natural Science Foundation of Fujian Province, China(2020J01465)
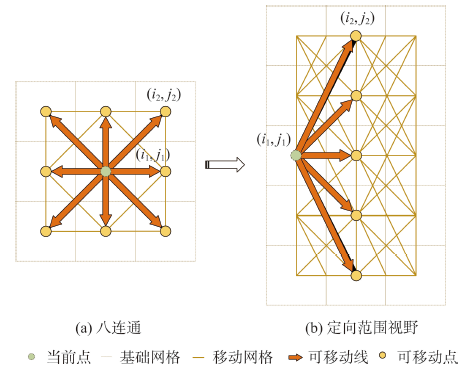
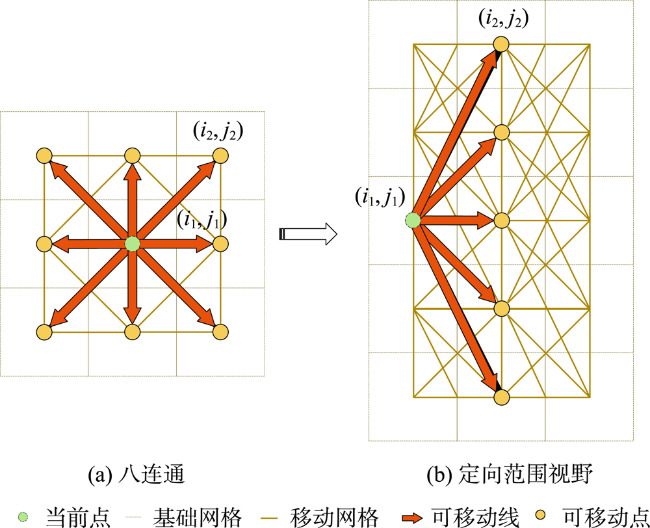
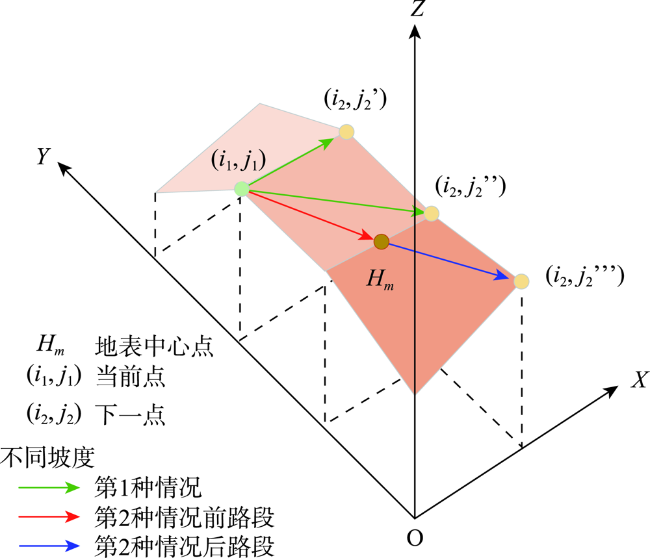
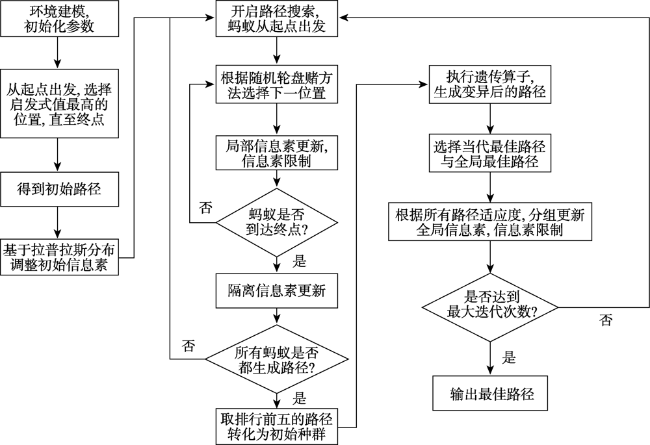
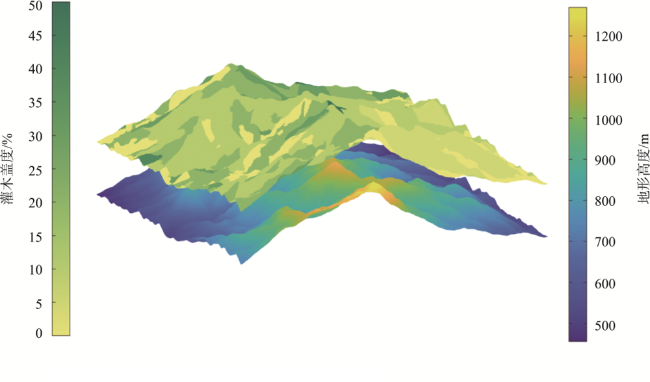
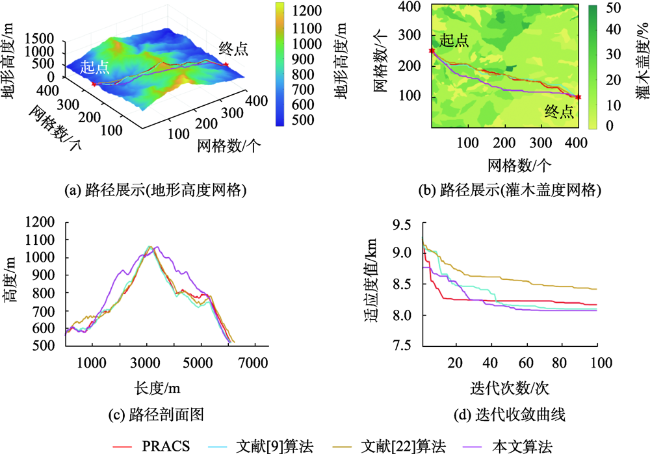
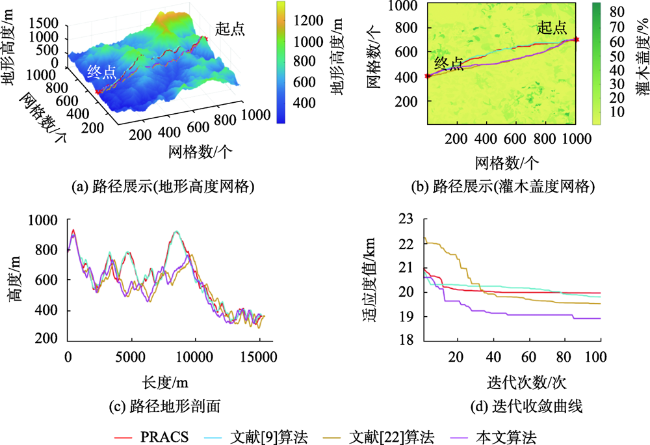
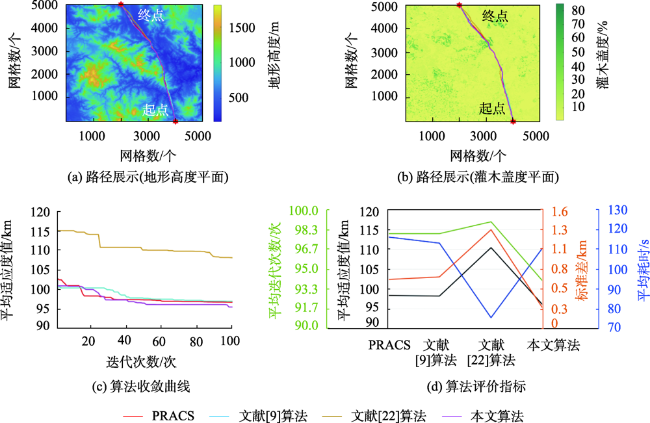
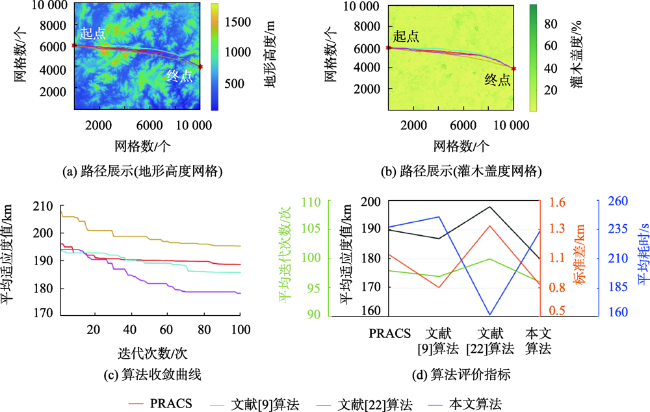
When a firefighting incident occurs in a wild complex mountain with no obvious roads or sparse roads, it is crucial to plan a safe and fast route through the complex mountain environment. Aiming at the problem that Ant Colony Optimization (ACO) is easy to fall into local optimum and the search time is long for complex mountain path planning, our study proposes an ACO algorithm for hiking emergency rescue path planning, which is suitable for fine-grained wild mountain environments. Firstly, our study analyzed the relationship between surface information and human movement speed based on existing literature and designed the objective function and heuristic function of the optimization algorithm considering two factors: surface shrub cover and terrain slope. Then, we used a combination of plane and field of view ant search combined with heuristic function and pheromone concentration to determine the next grid to be selected in the optimization process of the improved algorithm. Finally, the improved algorithm used a Laplace distribution to adjust the initial pheromone to improve the quality of the algorithm's initial solution. For the deadlock problem, the improved algorithm added isolated pheromones to prevent the next ant from falling into a deadlock dilemma. The improved algorithm used a genetic operator with grouping to update the global regular pheromone to avoid the ant colony from falling into a local optimum dilemma. In our study, we applied four ACO to the wild mountain environment of 400×400 grids, 1000 grids×1000 grids, 5000 grids×5000 grids, and 10 000 grids×10 000 grids for comparison, and set different starting and ending points for each environment. The experimental results show that each ACO using a combined planar and visual field search approach can obtain feasible paths in all four experiments, which verified the feasibility of the method. The quality of the paths using the improved algorithms was better than the other three algorithms, with improvements of 0.52%~4.95%, 4.71%~5.39%, 2.26%~13.11%, and 3.84%~9.16% in the four experiments, respectively, and the improved algorithm had shorter search time and convergence time. In addition, the combined planar and visual field search approach reduced the search space and improved the computational efficiency of the algorithm in the field 3D mountain environment. This search method was faster than the 8-connected method and reduced the average time consumption by more than 90%. Our algorithm is suitable for hiking path planning research in large 3D mountain scenes, with reduced planning time and improved path quality, providing technical support for the work of finding the best 3D mountain hiking paths without road networks.
WU Yuefei , LI Jianwei , BI Sheng , ZHU Xin , WANG Qianfeng . Research on Improved Ant Colony Algorithm for Mountain Hiking Emergency Rescue Path Planning[J]. Journal of Geo-information Science, 2023 , 25(1) : 90 -101 . DOI: 10.12082/dqxxkx.2023.220535
表1 改变网格选择方式前后对比Tab.1 Comparision of two grid search methods |
| 环境 | 单步邻近八连通搜索和禁忌表结合 | 定向范围视野 | |||
|---|---|---|---|---|---|
| 平均适应度/km | 平均运行时间/s | 平均适应度/km | 平均运行时间/s | ||
| 20×20 | 0.3753 | 3.4994 | 0.3708 | 0.3493 | |
| 40×40 | 0.6841 | 14.3852 | 0.6714 | 0.7202 | |
| 100×100 | 1.7444 | 168.4040 | 1.6707 | 2.3325 | |
表2 小范围环境各算法评估Tab.2 Evaluation of each algorithm in small scale environment |
| 环境 | 环境1 | 环境2 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 平均适应度/km | 标准差/km | 平均运行时间/s | 平均收敛次数/次 | 平均适应度/km | 标准差/km | 平均运行时间/s | 平均收敛次数/次 | ||
| PRACS | 8.3304 | 0.1136 | 7.8916 | 95 | 20.1837 | 0.1248 | 19.5329 | 93 | |
| 文献[9] | 8.3443 | 0.1405 | 7.3538 | 85 | 20.1466 | 0.1548 | 14.9997 | 95 | |
| 文献[22] | 8.7185 | 0.1324 | 4.6301 | 97 | 20.0394 | 0.2996 | 11.4807 | 98 | |
| 本文算法 | 8.2868 | 0.0828 | 7.4948 | 84 | 19.6965 | 0.0883 | 14.0772 | 82 | |
注:表中加粗字体表示各评价指标的较优值。 |
| [1] |
王帅辉, 耿松涛. 全域旅游营销策略与品牌策略规划[J]. 价格月刊, 2018(3):57-60.
[
|
| [2] |
覃先林, 李晓彤, 刘树超, 等. 中国林火卫星遥感预警监测技术研究进展[J]. 遥感学报, 2020, 24(5):511-520.
[
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
李逸斐, 陈静. 基于改进RRT*算法的城市低空路径规划方法研究[J]. 地球信息科学学报, 2022, 24(3):448-457.
[
|
| [16] |
徐晨晨, 廖小罕, 岳焕印, 等. 基于改进蚁群算法的无人机低空公共航路构建方法[J]. 地球信息科学学报, 2019, 21(4):570-579.
[
|
| [17] |
|
| [18] |
|
| [19] |
贺娇, 谭代伦. 基于视野范围和遗传算法的三维地形路径规划[J]. 计算机工程与应用, 2021, 57(15):279-285.
[
|
| [20] |
胡平志, 杨小柳, 李泽滔. 复杂山地环境下的机器人路径规划[J]. 计算机仿真, 2021, 38(3):286-291.
[
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}