
Journal of Geo-information Science >
Extraction of Muck Truck Operation Behavior Considering Trajectory Restoration and Classification
Received date: 2022-06-16
Revised date: 2022-08-19
Online published: 2023-04-19
Supported by
National Natural Science Foundation of China(42071364)
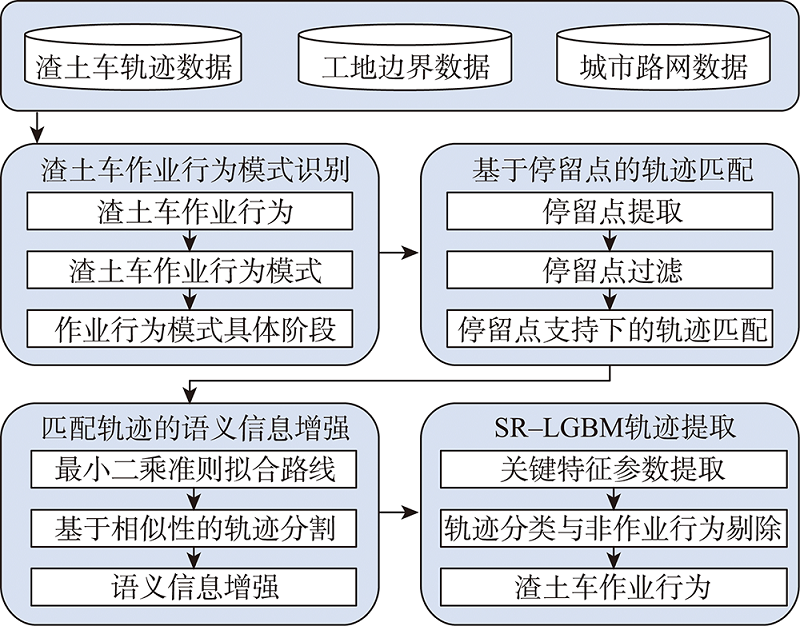
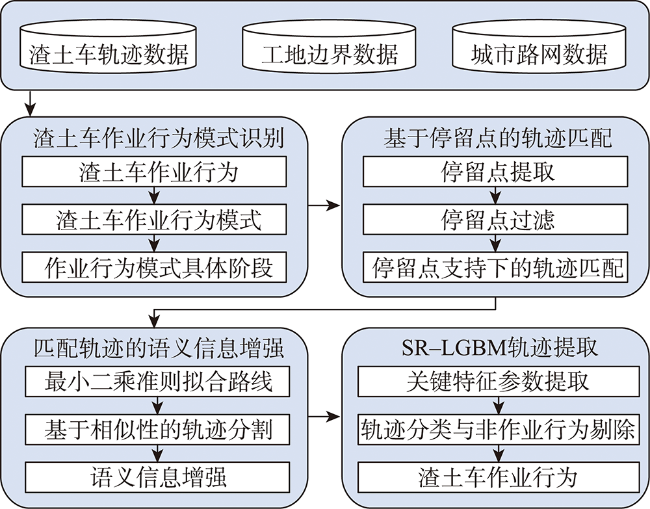
The muck truck trajectory data contain rich behavior pattern information, including key features such as parking behavior, transportation paths, abnormal activities, and muck loading and dumping OD points, etc. It has gradually become the main data source for operation monitoring and operation behavior supervision of muck trucks. However, at present, the traditional sign-in system of vehicle-mounted GPS data combined with site electronic fences is still commonly used in extraction of the muck truck operation behavior, which has a series of problems such as mutual inclusion and overlap between the electronic fence and the road. Aiming at the problem of misjudgment of vehicle operation in traditional extraction of muck truck operation behavior, this paper proposes a muck truck operation behavior extraction method considering trajectory restoration and classification. Firstly, the operation behavior pattern of muck trucks is recognized from two aspects: motion state and geometric form. Secondly, the stopping point extraction algorithm taking into account time and distance is used to extract the vehicle stopping point, and the mapping relationship between the stopping point and the trajectory is processed to complete the trajectory matching based on the stopping point. Then, the average similarity function is constructed to enhance the semantic information of the trajectory. Finally, the SR-LGBM algorithm is proposed to filter the operating trajectory and non-operating trajectory and extract the operation behavior of muck trucks. The test results show that the accuracy of the proposed method is 97.29%, which is significantly improved compared with the traditional classification algorithms such as GaussianNB and Logistic Regression. Our proposed methods effectively solve the misjudgment problem caused by the overlap of electronic fences and roads or multiple fences, and can accurately and efficiently extract the operation behavior of muck trucks.
ZHUANG Hanchen , ZHANG Yaru , WANG Wenxuan , ZHANG Shuliang . Extraction of Muck Truck Operation Behavior Considering Trajectory Restoration and Classification[J]. Journal of Geo-information Science, 2023 , 25(4) : 754 -765 . DOI: 10.12082/dqxxkx.2023.220414
表1 匹配轨迹的关键特征描述Tab. 1 Key features of matching trajectories |
| 视角 | 变量 | 单位 | 特征描述 |
|---|---|---|---|
| 瞬时速度 | m/s | 平均瞬时速度 | |
| m/s | 瞬时速度标准差 | ||
| 加速度 | m/s2 | 平均加速度 | |
| m/s2 | 加速度标准差 | ||
| 路网距离 | m | 路网距离中值 | |
| m | 路网距离标准差 | ||
| 停留时长 | s | 累计停留时长 | |
| 累计停留时长比率 | |||
| 转角 | ° | 平均转角 | |
| ° | 转角标准差 | ||
| 轨迹复杂度 | m | 轨迹长度 | |
| m2 | 轨迹覆盖面积 | ||
| 轨迹平滑比率 | |||
| 驶入驶出点差异 | m | 两点间距 | |
| m/s | 速度差 | ||
| m/s2 | 加速度差 | ||
| m | 路网距离差 | ||
| ° | 方位角差 |
表2 SR-LGBM算法的主要参数Tab. 2 Main parameters of SR-LGBM algorithm |
| 参数 | 值 | 解释 |
|---|---|---|
| kernel | linear | SVM核函数类型,本文采用线性核函数 |
| C | 0.1 | SVM惩罚系数,用于调整准确率和泛化能力 |
| num_leaves | 255 | 每棵树的叶子数量 |
| max_bin | 255 | 表示最大的桶的数量,能根据此值来自动压缩内存 |
| max_depth | no limit | 描述了树的最大深度,能够处理模型的过拟合 |
| min_child_samples | 20 | 一片叶子需具有的最小记录数,用来处理过度拟合的问题 |
| feature_fraction | 0.8 | 在每次迭代中随机选择用于构建树的特征的部分 |
| bagging_fraction | 0.8 | 每次迭代要使用的数据,一般用于加快训练和避免过度拟合 |
表3 作业轨迹关键特征重要性排序Tab. 3 Importance ranking of key features of operation trajectories |
| 排序 | 变量 | 描述 | 排序 | 变量 | 描述 |
|---|---|---|---|---|---|
| 1 | 加速度标准差 | 10 | 加速度差 | ||
| 2 | 轨迹平滑比率 | 11 | 累计停留时长比率 | ||
| 3 | 瞬时速度标准差 | 12 | 路网距离标准差 | ||
| 4 | 平均加速度 | 13 | 轨迹长度 | ||
| 5 | 速度差 | 14 | 路网距离差 | ||
| 6 | 转角标准差 | 15 | 路网距离中值 | ||
| 7 | 平均转角 | 16 | 两点间距 | ||
| 8 | 平均瞬时速度 | 17 | 累计停留时长 | ||
| 9 | 方位角差 | 18 | 轨迹覆盖面积 |
表4 不同特征数下SR-LGBM的输出结果评价Tab. 4 Evaluation of SR-LGBM output results under different feature numbers (%) |
| 特征数 | 准确率 | 精确率 | 召回率 | F1值 |
|---|---|---|---|---|
| 3 | 89.74 | 92.55 | 93.71 | 93.13 |
| 5 | 95.00 | 96.15 | 97.14 | 96.65 |
| 7 | 94.91 | 96.68 | 96.46 | 96.57 |
| 9 | 95.00 | 96.05 | 97.26 | 96.65 |
| 11 | 97.29 | 98.17 | 98.17 | 98.17 |
| 13 | 97.03 | 98.05 | 97.94 | 98.00 |
| 15 | 96.78 | 97.72 | 97.94 | 97.83 |
| 17 | 96.86 | 97.83 | 97.94 | 97.89 |
表5 不同算法的渣土车作业行为分类结果比较Tab. 5 Comparison of classification results of muck truck operation behaviors with different algorithms (%) |
| 算法 | 准确率 | 精确率 | 召回率 | F1值 |
|---|---|---|---|---|
| GaussianNB | 89.40 | 90.11 | 96.06 | 92.99 |
| k-Nearest Neighbors | 86.43 | 92.40 | 88.76 | 90.54 |
| Logistic Regression | 92.45 | 95.85 | 93.74 | 94.79 |
| Multi-layer Perceptron | 92.54 | 96.86 | 92.82 | 94.79 |
| RBF-SVM | 88.80 | 89.17 | 96.41 | 92.65 |
| LGBM | 96.01 | 97.43 | 97.32 | 97.37 |
| SR-LGBM | 97.29 | 98.17 | 98.17 | 98.17 |
| [1] |
|
| [2] |
向隆刚, 龚健雅, 吴涛, 等. 一种面向Stop/Move抽象的轨迹时空关系[J]. 武汉大学学报·信息科学版, 2014, 39(8):956-962.
[
|
| [3] |
|
| [4] |
兰志辉, 陈莉, 段治州. 基于时间序列聚类的轨迹停留点检测算法[J]. 计算机应用研究, 2020, 37(12):3557-3560.
[
|
| [5] |
张健钦, 仇培元, 杜明义. 基于时空轨迹数据的出行特征挖掘方法[J]. 交通运输系统工程与信息, 2014, 14(6):72-78.
[
|
| [6] |
刘汇慧, 阚子涵, 孙飞, 等. 采用轨迹大数据探测短时非营运行为[J]. 武汉大学学报·信息科学版, 2016, 41(9):1192-1198.
[
|
| [7] |
向隆刚, 邵晓天. 载体轨迹停留信息提取的核密度法及其可视化[J]. 测绘学报, 2016, 45(9):1122-1131.
[
|
| [8] |
李思宇, 向隆刚, 张彩丽, 等. 基于低频出租车轨迹的城市路网交叉口提取研究[J]. 地球信息科学学报, 2019, 21(12):1845-1854.
[
|
| [9] |
|
| [10] |
李军, 解超, 王林, 等. 基于轨迹数据的道路客运班车停留站点位置提取方法[J]. 交通信息与安全, 2021, 39(4):60-67.
[
|
| [11] |
吴华意, 黄蕊, 游兰, 等. 出租车轨迹数据挖掘进展[J]. 测绘学报, 2019, 48(11):1341-1356.
[
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
梁军辉, 林坚, 杜洋. 大数据条件下城市用地类型辨识研究——基于出租车GPS数据的动态感知[J]. 上海国土资源, 2016, 37(1):28-32.
[
|
| [18] |
|
| [19] |
李秋萍, 刘逸诗, 巩诗瑶, 等. 基于居民出行活动特征的个体经济水平推断方法[J]. 武汉大学学报·信息科学版, 2019, 44(10):1575-1580.
[
|
| [20] |
|
| [21] |
张毅, 朱攀. 电动出租车专用充电场站选址模型研究[J]. 地球信息科学学报, 2021, 23(5):802-811.
[
|
| [22] |
|
| [23] |
高强, 张凤荔, 王瑞锦, 等. 轨迹大数据:数据处理关键技术研究综述[J]. 软件学报, 2017, 28(4):959-992.
[
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
侯颖超, 王盼成, 刘兴权, 等. 基于速度的空间轨迹停留点提取算法[J]. 地理与地理信息科学, 2016, 32(6):63-68,2.
|
| [29] |
姚迪, 张超, 黄建辉, 等. 时空数据语义理解:技术与应用[J]. 软件学报, 2018, 29(7):2018-2045.
[
|
| [30] |
|
| [31] |
|
| [32] |
齐凌艳, 陈荣国, 温馨. 基于语义轨迹停留点的位置服务匹配与应用研究[J]. 地球信息科学学报, 2014, 16(5):720-726.
[
|
| [33] |
|
| [34] |
郑诗晨, 盛业华, 吕海洋. 基于粒子滤波的行车轨迹路网匹配方法[J]. 地球信息科学学报, 2020, 22(11):2109-2117.
[
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}