
Journal of Geo-information Science >
"Production-Living-Ecological Spaces" Recognition Methods based on Street View Images
Received date: 2022-07-21
Revised date: 2022-10-08
Online published: 2023-04-19
Supported by
National Natural Science Foundation of China(42271476)
351 Talent Program of Wuhan University(2020007)
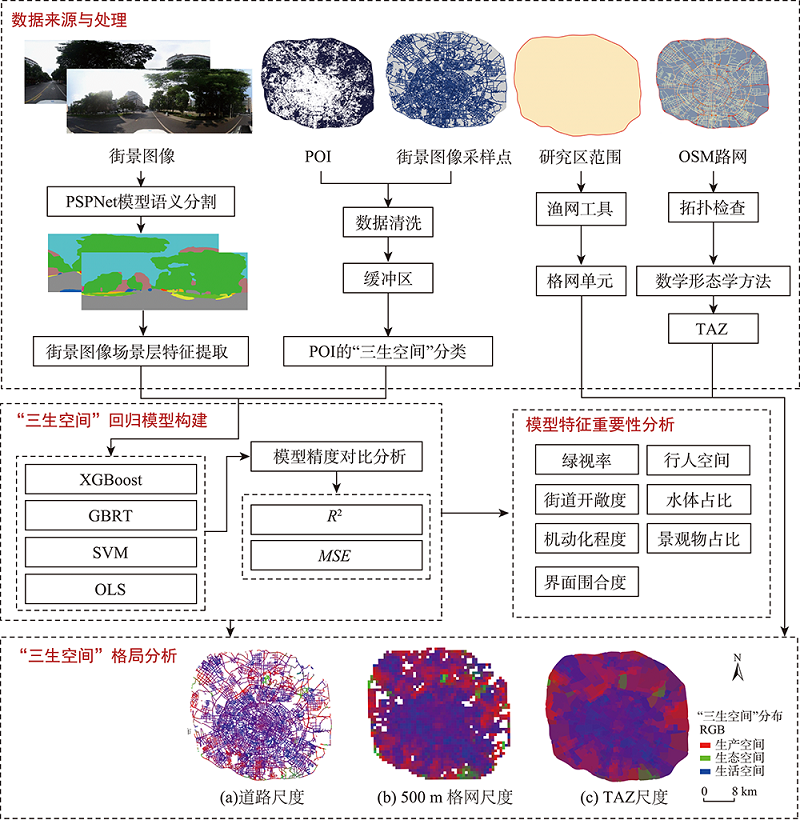
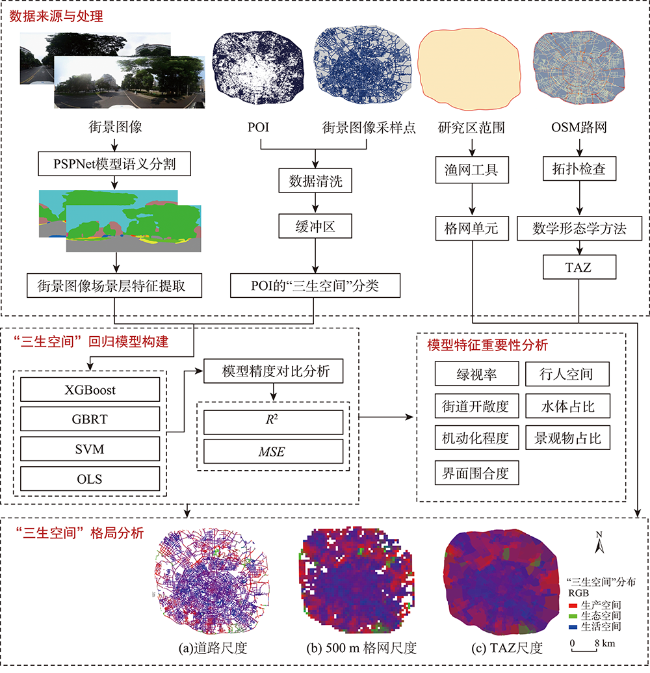
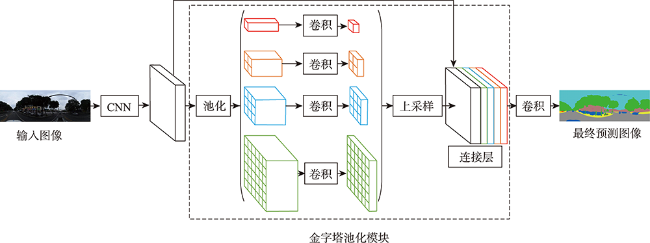
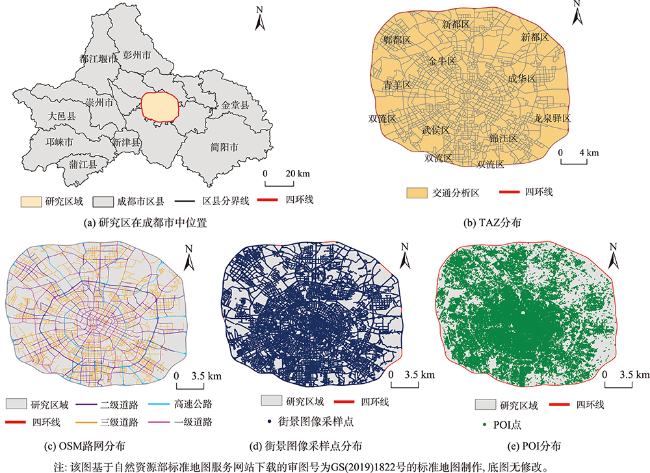
Understanding the urban spatial pattern from the perspective of the “Production-Living -Ecological” function not only paves the way to the optimization of land spatial structure, but also reflects the internal functional form and combination mode of urban land. However, in the past, the recognition of urban “Production-Living -Ecological Spaces” (PLES) mainly relied on remote sensing images, Point of Interest (POI), and land use data, and there was a lack of three-dimensional information within a city. Street View Images (SVI) can reflect the characteristics of the streets in the city and capture large-scale and high-resolution objective measurements of the physical environment within a street from a close-up view. Therefore, based on the semantic features of the scene extracted from the SVI, this paper proposes a method of identifying PLES in the central urban area and analyzing the importance of different features of the PLES. Taking the Fourth Ring Road of Chengdu as the study case, the classification system of PLES is constructed based on POI data, and the proportion of PLES is calculated at each SVI sampling point. The eXtreme Gradient Boosting (XGBoost) algorithm is used to identify the urban PLES, and a comparative test of model accuracy is also carried out. The spatial distribution of PLES in the study area is analyzed from three scales, i.e., road network, 500-m grid, and traffic analysis zone. The SHapley Additive exPlanation (SHAP) method is introduced to identify the important features that contribute to PLES. The results are as follows: (1) The proposed method of identifying PLES based on SVI in this paper has a high accuracy. The R2 of the model for identifying PLES reaches 0.6, indicating the feasibility of SVI for identifying PLES; (2) The spatial pattern of PLES reveals that the study area is dominated by production-living spaces, which are large in number and distributed in pieces in the study area. The number of units dominated by ecological space is small, and they are mainly distributed in large parks; (3) Among the semantic features of the seven types of scenes, street openness and motorization level have the greatest impact on the formation of the PLES. Based on PLES, this study uses SVI data to conduct a fine-scale analysis of land use in central urban areas and determine the types of urban land. This paper enriches the data and methods of PLES identification and provides a new tool for the optimization of urban spatial structure and development decision making.
WAN Jiangqin , FEI Teng . "Production-Living-Ecological Spaces" Recognition Methods based on Street View Images[J]. Journal of Geo-information Science, 2023 , 25(4) : 838 -851 . DOI: 10.12082/dqxxkx.2023.220534
表1 街景图像场景层语义与像素层语义对应表Tab. 1 Correspondence table between scene layer semantics and pixel layer semantics of SVI |
| 序号 | 场景层语义 | 像素层语义 |
|---|---|---|
| 1 | 绿视率 | 树木、草、植物等 |
| 2 | 街道开敞度 | 天空 |
| 3 | 界面围合度 | 建筑、房屋、墙面、窗户、柱子等 |
| 4 | 机动化程度 | 机动化道路和各类机动车的总和 |
| 5 | 行人空间 | 行人、自行车和步行街道设施 |
| 6 | 水体占比 | 湖、河等 |
| 7 | 景观物占比 | 塔、雕塑、喷泉等 |
表2 基于“三生空间”的POI类型分类Tab. 2 Classification of POI types based on the “Production-Living-Ecological Spaces” (PLES) |
| 类型 | 大类 | 中类 | 对应POI类型 | 相关度α | 范围度β | 综合权重λ |
|---|---|---|---|---|---|---|
| 生产空间P | 生产性服务空间 | 公司企业P1 | 商业贸易、网络科技等 | 0.340 | 0.300 | 0.102 |
| 金融保险P2 | 银行、保险机构等 | 0.150 | 0.300 | 0.045 | ||
| 农业空间 | 农林基地P3 | 农林牧副渔等生产基地 | 0.240 | 0.600 | 0.144 | |
| 工业空间 | 工厂园区P4 | 工厂、产业园区等 | 0.370 | 0.700 | 0.259 | |
| 仓储物流P5 | 仓储基地、物流速递等 | 0.110 | 0.300 | 0.033 | ||
| 管理空间 | 政府机构P6 | 机关单位、行业协会等 | 0.060 | 0.300 | 0.018 | |
| 交通空间 | 交通设施P7 | 公交车站、停车场等 | 0.050 | 0.150 | 0.008 | |
| 生活空间L | 生活性服务空间 | 餐饮服务L1 | 中餐厅、冷饮店等 | 0.100 | 0.100 | 0.010 |
| 购物服务L2 | 超市、商场、便利店等 | 0.110 | 0.150 | 0.017 | ||
| 生活服务L3 | 美容美发、邮局、洗衣店等 | 0.110 | 0.100 | 0.011 | ||
| 医疗保健L4 | 医院、诊所、疗养院等 | 0.210 | 0.200 | 0.042 | ||
| 科教文化L5 | 学校、科研机构等 | 0.120 | 0.300 | 0.036 | ||
| 娱乐休闲L6 | 运动场所、游乐场等 | 0.070 | 0.100 | 0.007 | ||
| 住宿服务L7 | 酒店、宾馆等 | 0.140 | 0.100 | 0.014 | ||
| 居住空间 | 居住区L8 | 住宅、别墅等 | 0.550 | 0.500 | 0.275 | |
| 生态空间E | 绿地空间 | 公园绿地E1 | 公园广场、植物园等 | 0.600 | 0.900 | 0.540 |
| 风景名胜E2 | 旅游景点、宗教寺庙等 | 0.390 | 0.800 | 0.312 | ||
| 户外绿地E3 | 露营地、高尔夫球场等 | 0.270 | 0.450 | 0.122 |
表3 研究区POI数据示例Tab. 3 Examples of POI data in the study area |
| 名称 | 大类 | 中类 | 小类 | 地址 | 经度/°E | 纬度/°N |
|---|---|---|---|---|---|---|
| 好佰家超市 | 购物服务 | 超级市场 | 超市 | 金芙蓉大道北150 m | 104.05 | 30.74 |
| 泡桐树小学(天府校区) | 科教文化服务 | 学校 | 小学 | 锦尚西二路299号附1 | 104.05 | 30.58 |
| 小陈串串香(青森街) | 餐饮服务 | 中餐厅 | 火锅店 | 苏坡街道青森北路苏坡立交青森街一号附45 | 103.99 | 30.67 |
表4 不同模型参数设置Tab. 4 Parameter settings of different models |
| 模型 | 参数 | 取值 | 模型 | 参数 | 取值 |
|---|---|---|---|---|---|
| OLS | missing | none | OLS | hasconst | None |
| SVM | kernel | rbf | SVM | gamma | auto |
| C | 1000 | cache_size | 200 | ||
| GBRT | n_estimators | 300 | GBRT | max_features | None |
| loss | ls | max_depth | 5 | ||
| subsample | 0.8 | min_samples_split | 50 | ||
| learning_rate | 0.1 | min_samples_leaf | 30 | ||
| XGBoost | n_estimators | 300 | XGBoost | eta | 0.3 |
| min_child_weight | 3 | max_depth | 7 | ||
| subsample | 0.8 | gamma | 0.2 | ||
| learning_rate | 0.1 | colsample_bytree | 0.8 |
表5 基于不同模型的对中心城区“三生空间”识别结果准确性评价Tab. 5 Accuracy evaluation of the results of the identification of the PLES in the central urban area based on different models |
| “三生空间”类型 | R2 | MSE | |||||||
|---|---|---|---|---|---|---|---|---|---|
| OLS | SVM | GBRT | XGBoost | OLS | SVM | GBRT | XGBoost | ||
| 生产空间 | 0.12 | 0.23 | 0.49 | 0.61 | 0.05 | 0.04 | 0.03 | 0.02 | |
| 生活空间 | 0.19 | 0.32 | 0.55 | 0.65 | 0.04 | 0.03 | 0.02 | 0.02 | |
| 生态空间 | 0.10 | 0.21 | 0.57 | 0.62 | 0.01 | 0.01 | 0.01 | 0.01 | |
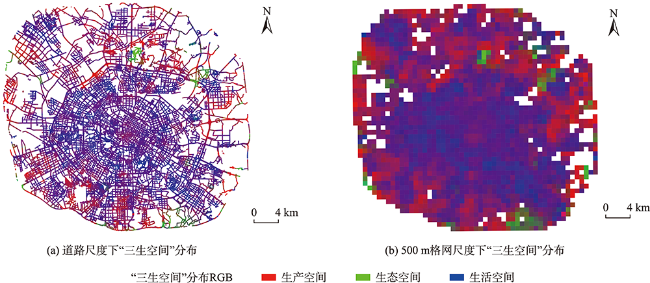
图4 道路和500m格网尺度下基于颜色合成的“三生空间”分布可视化Fig. 4 Visualization of PLES distribution based on color synthesis at road network and 500m grid scale |
表6 基于MDI和PI的XGBoost模型特征重要性Tab. 6 Feature importance table of XGBoost model based on MDI and PI |
| 特征 | MDI | PI | ||||
|---|---|---|---|---|---|---|
| 生产空间 | 生活空间 | 生态空间 | 生产空间 | 生活空间 | 生态空间 | |
| 绿视率 | 0.13 | 0.12 | 0.14 | 0.19 | 0.16 | 0.28 |
| 街道开敞度 | 0.22 | 0.26 | 0.15 | 0.43 | 0.51 | 0.32 |
| 界面围合度 | 0.13 | 0.13 | 0.19 | 0.18 | 0.17 | 0.41 |
| 机动化程度 | 0.14 | 0.16 | 0.14 | 0.24 | 0.28 | 0.23 |
| 行人空间 | 0.11 | 0.10 | 0.13 | 0.21 | 0.19 | 0.13 |
| 水体占比 | 0.14 | 0.12 | 0.13 | 0.26 | 0.23 | 0.15 |
| 景观物占比 | 0.14 | 0.12 | 0.14 | 0.24 | 0.21 | 0.18 |
注:表中绿-黄-红色阶表征不同特征重要性程度由小至大的排序情况。 |
| [1] |
习近平. 关于《中共中央关于全面深化改革若干重大问题的决定》的说明[J]. 求是, 2013(22):19-27.
[
|
| [2] |
|
| [3] |
|
| [4] |
武占云. “三生”空间优化及京津冀生态环境保护[J]. 城市, 2014(12):26-29.
[
|
| [5] |
|
| [6] |
刘继来, 刘彦随, 李裕瑞. 中国“三生空间”分类评价与时空格局分析[J]. 地理学报, 2017, 72(7):1290-1304.
[
|
| [7] |
李广东, 方创琳. 城市生态—生产—生活空间功能定量识别与分析[J]. 地理学报, 2016, 71(1):49-65.
[
|
| [8] |
黄金川, 林浩曦, 漆潇潇. 面向国土空间优化的三生空间研究进展[J]. 地理科学进展, 2017, 36(3):378-391.
[
|
| [9] |
刘春芳, 王奕璇, 何瑞东, 等. 基于居民行为的三生空间识别与优化分析框架[J]. 自然资源学报, 2019, 34(10):2113-2122.
[
|
| [10] |
张红旗, 许尔琪, 朱会义. 中国“三生用地”分类及其空间格局[J]. 资源科学, 2015, 37(7):1332-1338.
[
|
| [11] |
|
| [12] |
逯承鹏, 纪薇, 刘志良, 等. 黄河流域甘肃段县域“三生”功能空间时空格局及影响因素识别[J]. 地理科学, 2022, 42(4):579-588.
[
|
| [13] |
王成, 唐宁. 重庆市乡村三生空间功能耦合协调的时空特征与格局演化[J]. 地理研究, 2018, 37(6):1100-1114.
[
|
| [14] |
冀正欣, 刘超, 许月卿, 等. 基于土地利用功能测度的“三生”空间识别与优化调控[J]. 农业工程学报, 2020, 36(18):222-231.
[
|
| [15] |
赵宏波, 魏甲晨, 孙东琪, 等. 基于随机森林模型的“生产-生活-生态”空间识别及时空演变分析——以郑州市为例[J]. 地理研究, 2021, 40(4):945-957.
[
|
| [16] |
曹根榕, 顾朝林, 张乔扬. 基于POI数据的中心城区“三生空间”识别及格局分析——以上海市中心城区为例[J]. 城市规划学刊, 2019(2):44-53.
[
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
张帆, 刘瑜. 街景影像——基于人工智能的方法与应用[J]. 遥感学报, 2021, 25(5):1043-1054.
[
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
李建春, 起晓星, 袁文华. 基于POI数据的建设用地多功能混合利用空间分异研究[J]. 地理科学进展, 2022, 41(2):239-250.
[
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
成都市人民政府. 成都概况[EB/OL]. http://www.che ngdu.gov.cn/chengdu/rscd/index.shtml, n.d, 2022-07-15.
[The official website of Chengdu Municipal People’s Government. Chengdu overview[EB/OL]. http://www.chengdu.gov.cn/chengdu/rscd/index.shtml, n.d, 2022-07-15.]
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}