
Journal of Geo-information Science >
Evaluation of Road Environment Safety Perception and Analysis of Influencing Factors Combining Street View Imagery and Machine Learning
Received date: 2022-12-01
Revised date: 2023-03-12
Online published: 2023-04-19
Supported by
The Industrial Support and Program Project of Universities in Gansu Province(2022CYZC-30)
The National Nature Science Foundation of China(41930101)
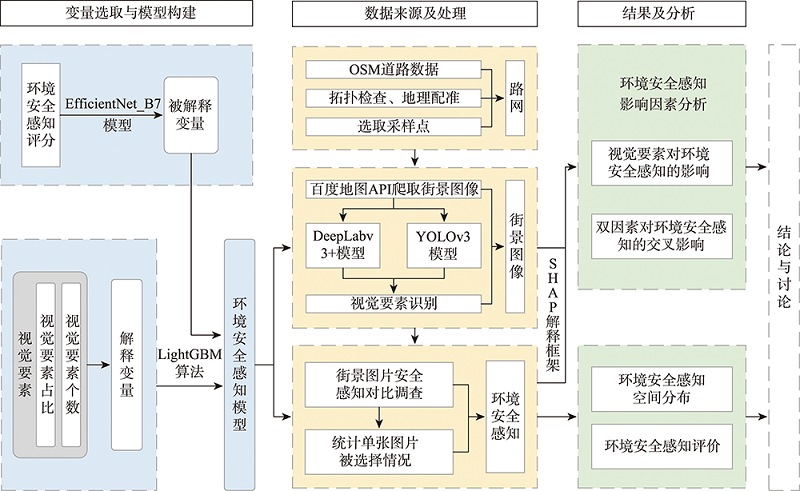
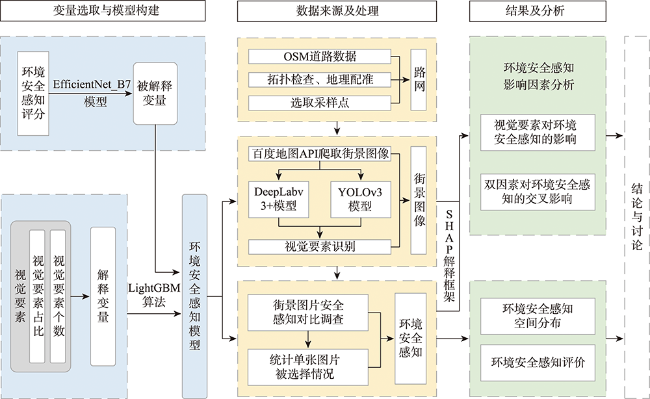
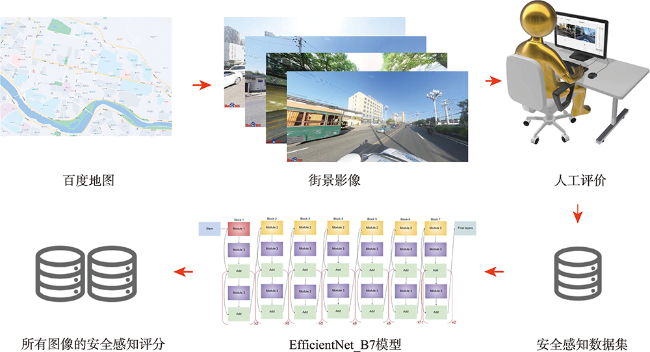
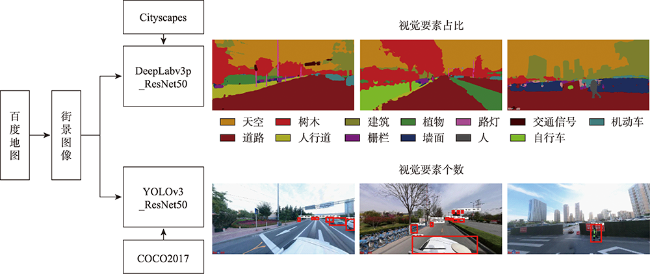
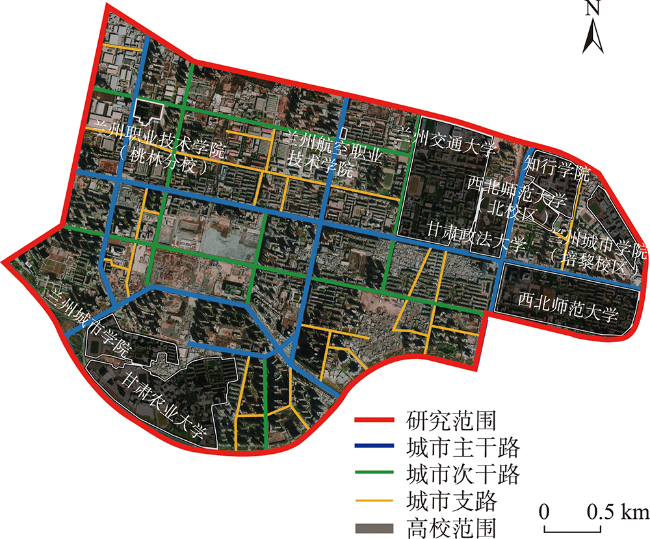
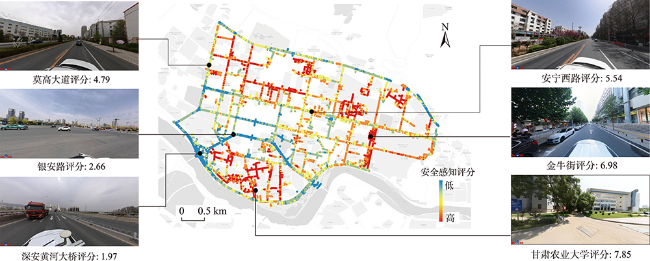
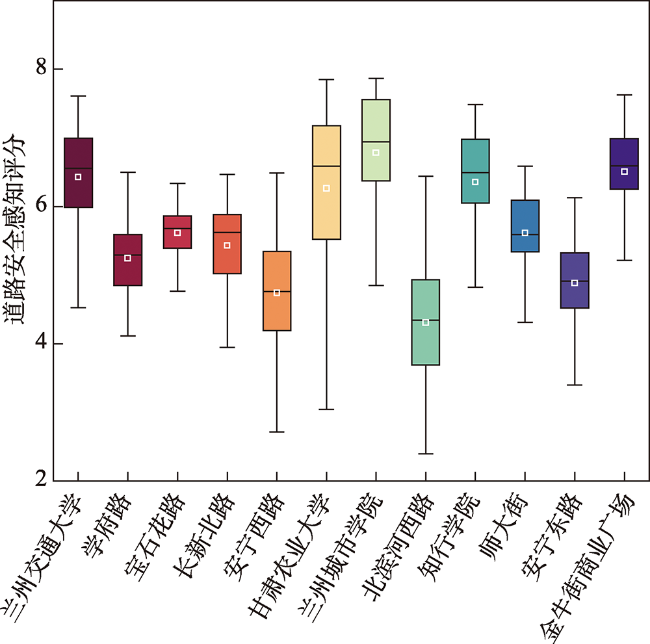
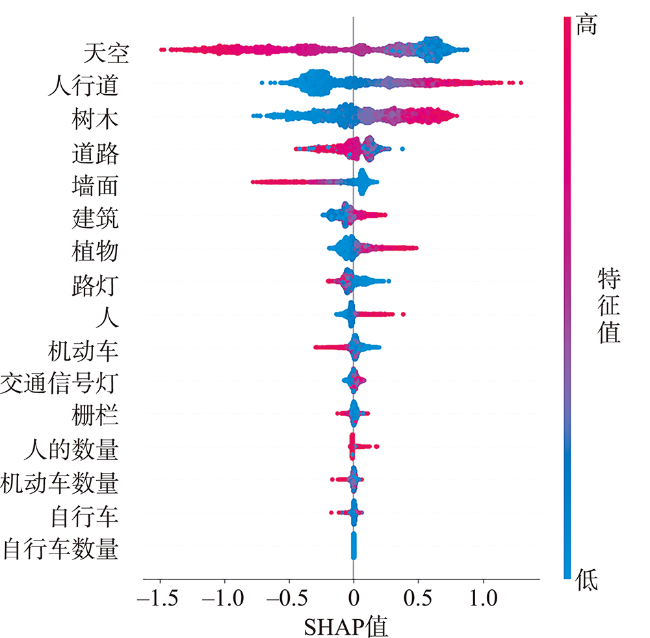
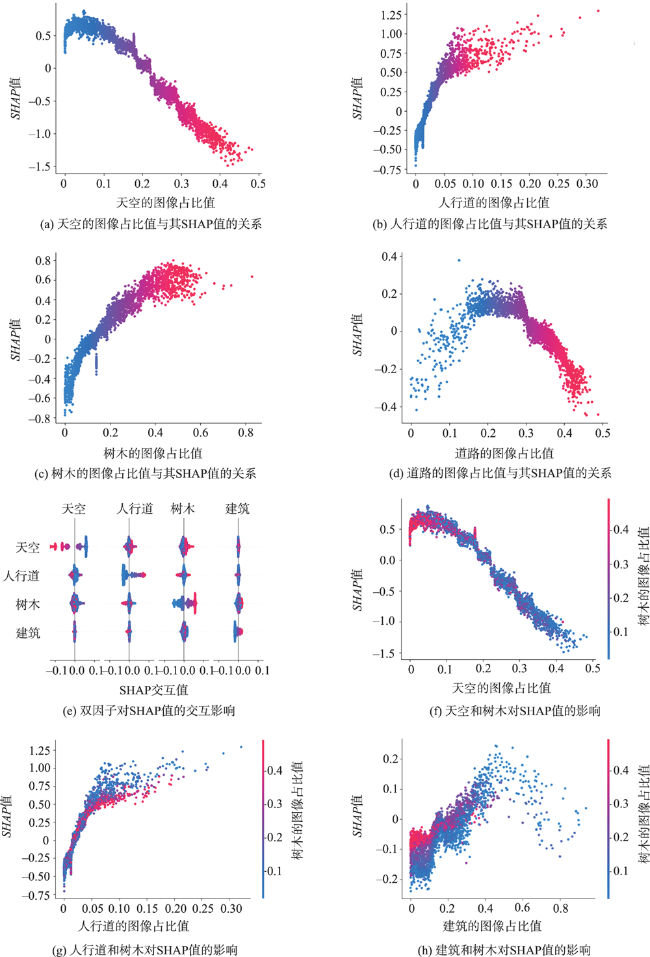
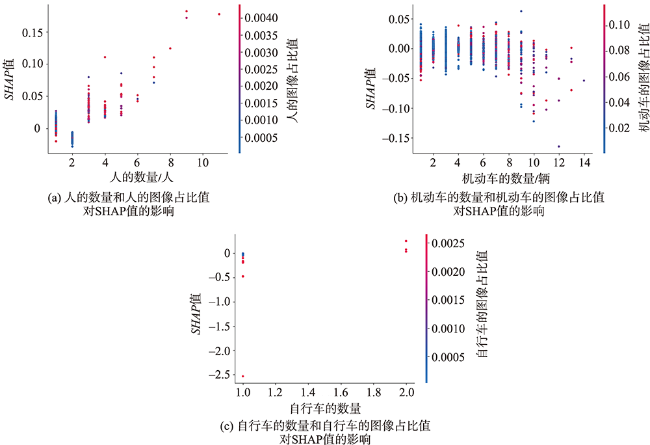
Accurate identification of visual factors affecting environmental safety perception provides important support for improving urban traffic environment and enhancing pedestrian travel safety. However, it is difficult to quantify environmental safety perception in complex scenes on a large scale in existing studies. Therefore, this study uses image semantic segmentation and object detection techniques to extract visual factors from streetscape images and constructs a road safety perception dataset by manual scoring in combination with deep learning methods. The influencing factors of environmental safety perception are also identified based on light gradient boosting machine algorithm and SHAP interpretation framework. In our study, the Anning District college cluster in Lanzhou City, a canyon city with a special road environment, is selected for the empirical study. Results show that: (1) The safety perception scores of colleges and commercial streets are high, while those of urban roads are generally low; (2) The image ratios of sky, sidewalk, road, and tree are the four factors that have the greatest influence on environmental safety perception, among which the image ratio of sky is linear, the image ratios of sidewalk and tree are similar to a logarithmic function, and the image ratio of road is similar to a quadratic function; (3) The proportion and number of visual factors have an interactive effect. A reasonable distribution of visual factors helps to create good spatial sightlines and suitable behavioral spaces, thus enhancing the perception of environmental safety.
LI Xinyu , YAN Haowen , WANG Zhuo , WANG Bingxuan . Evaluation of Road Environment Safety Perception and Analysis of Influencing Factors Combining Street View Imagery and Machine Learning[J]. Journal of Geo-information Science, 2023 , 25(4) : 852 -865 . DOI: 10.12082/dqxxkx.2023.220941
| [1] |
寇世浩, 姚尧, 郑泓, 等. 基于路网数据和复杂图论的中国城市交通布局评价[J]. 地球信息科学学报, 2021, 23(5):812-824.
[
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
安莉娟, 丛中. 安全感研究述评[J]. 中国行为医学科学, 2003, 12(6):698-699.
[
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
刘智谦, 吕建军, 姚尧, 等. 基于街景图像的可解释性城市感知模型研究方法[J]. 地球信息科学学报, 2022, 24(10):2045-2057.
[
|
| [22] |
张丽英, 裴韬, 陈宜金, 等. 基于街景图像的城市环境评价研究综述[J]. 地球信息科学学报, 2019, 21(1):46-58.
[
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
杨灿灿, 许芳年, 江岭, 等. 基于街景影像的城市道路空间舒适度研究[J]. 地球信息科学学报, 2021, 23(5): 785-801.
[
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
林玉莲, 胡正凡. 环境心理学[M]. 北京: 中国建筑工业出版社, 2000.
[
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
兰州市统计局. 2021年兰州市国民经济和社会发展统计公报[EB/OL]. http://tjj.lanzhou.gov.cn/art/2022/4/13/art_4850_1110642.html.
[Lanzhou Municipal Bureau of Statistics. Statistical Bulletin of National Economic and Social Development of Lanzhou in 2021[EB/OL]. http://tjj.lanzhou.gov.cn/art/2022/4/13/art_4850_1110642.html.
|
| [57] |
Hall E T. The hidden dimension[M]. [1st ed.]. Garden City, N.Y.: Doubleday, 1966
|
| [58] |
|
| [59] |
|
| [60] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}