
Journal of Geo-information Science >
Extracting Canopy Four Geometric-optical Components by Incorporating Illumination Information into a Multi-scale K-means Cluster Method
Received date: 2022-06-28
Revised date: 2022-08-17
Online published: 2023-04-27
Supported by
National Natural Science Foundation of China(42192580)
National Natural Science Foundation of China(42192581)
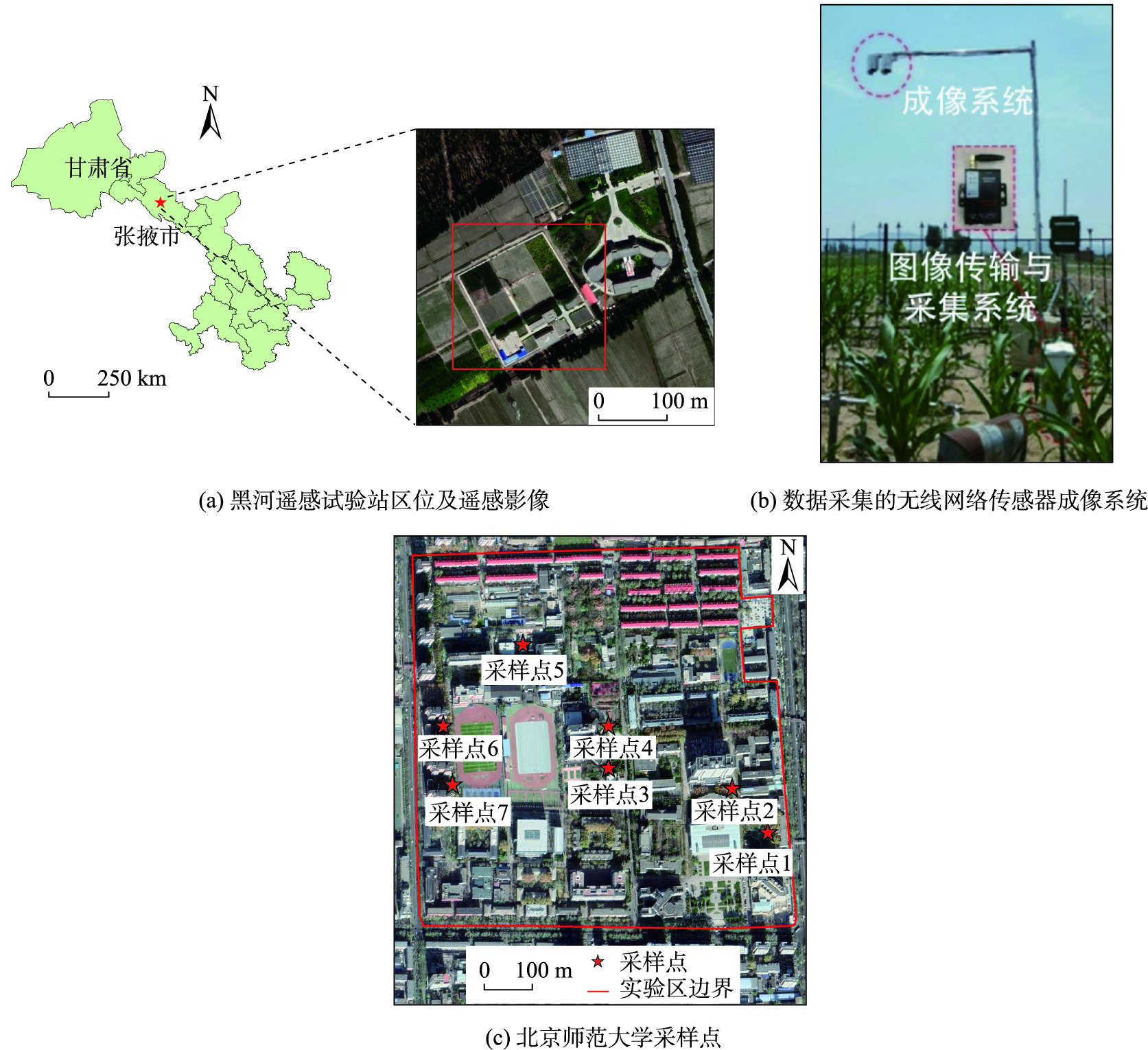
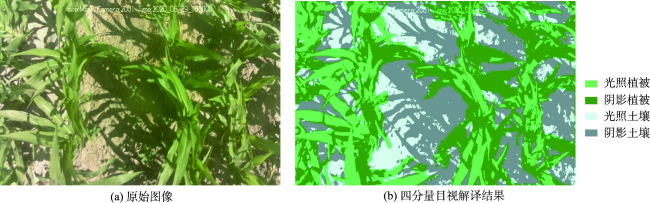
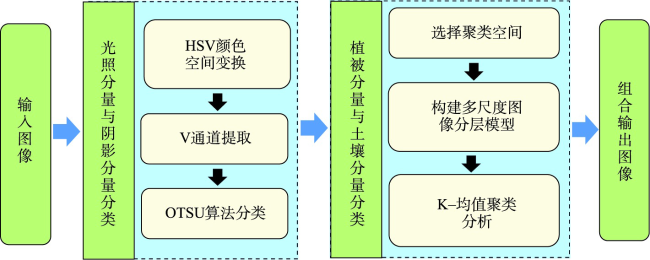
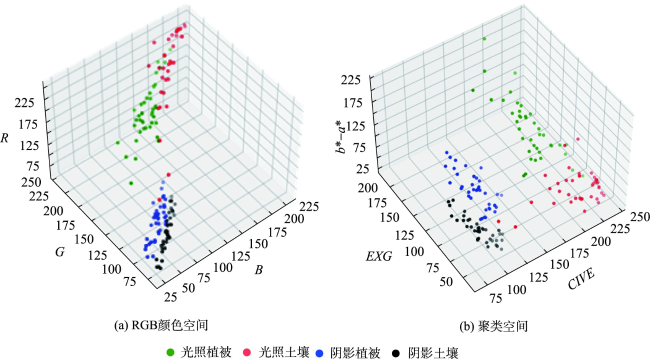
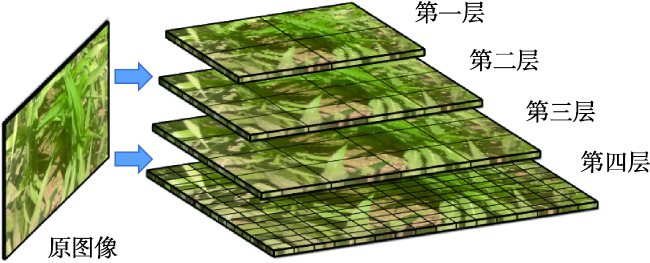
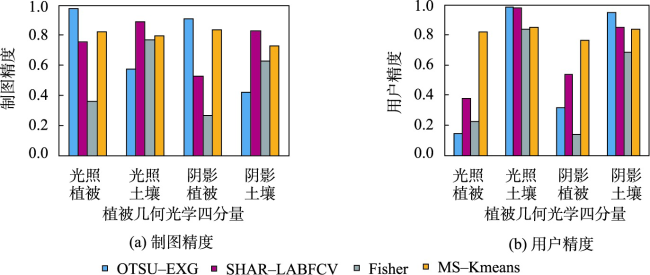
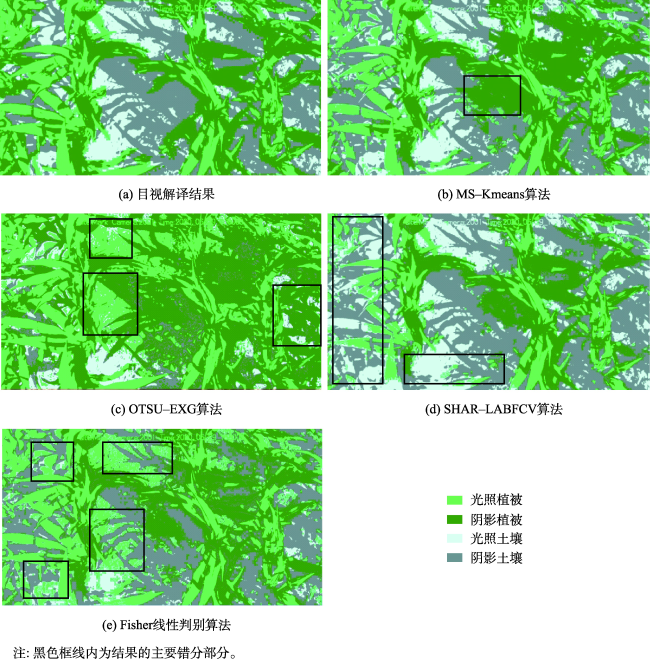
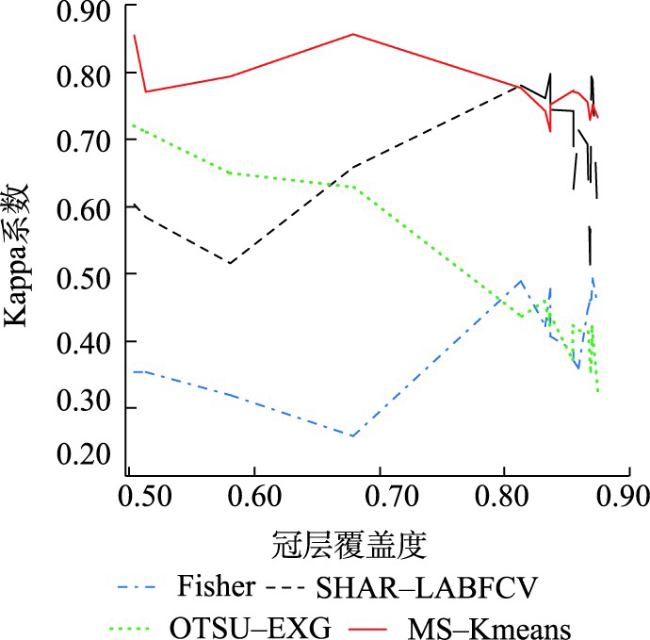
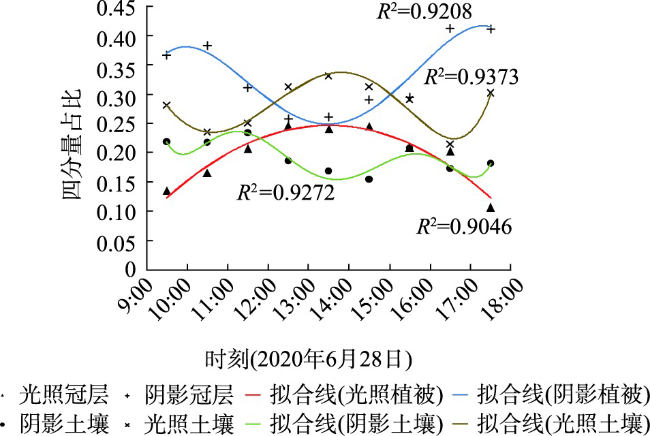
The vegetation and soil fraction in the sensor's field of viewing will be varied with different light and observation geometry, and such variation can be used by the remote sensing geometric-optical model to simulate canopy multi-angle reflectance. As a result, the four components, i.e., lit and shaded vegetation, as well as lit and shaded soil are important input parameters for the geometric-optical model. In this paper, an algorithm for extracting the four geometric-optical components with the combination of solar illumination information and multi-scale clusters derived from a k-means process was proposed. Firstly, the clustering space was formed by synthesizing a new color index, then the multi-scale image hierarchical model was constructed by using the lit and shaded component in the subgraphs of the images respectively, and then the k-means clustering was performed in the multi-scale image hierarchical model to obtain the vegetation component and soil component results. Finally, the obtained results in the above subgraphs were combined as the output to achieve the extraction of four geometric-optical components. Validation on the proposed method was conducted on fifty-two vegetation canopy images which were acquired under natural lighting conditions. We compared our results with those of OTSU threshold on ultra-green index, Fisher linear algorithm, and SHAR-LABFVC algorithm. The results showed that the proposed algorithm performed well in mapping accuracy and user accuracy in the classification of shaded components, and the highest Kappa coefficient (0.82) was achieved. Good and stable classification results were observed under the conditions of continuous changing canopy cover and solar altitude angle, and this promising result suggests that the proposed method has the potential in long-term vegetation monitoring as well as measuring vegetation four-component changes even in a single day. The advantages of this algorithm are to improve the classification accuracy of the shadow component and to solve the extraction problem of the four components under high vegetation coverage. However, reducing computational cost and thus to improve the applicability of this algorithm in complex scenes will need further efforts in the future work.
FENG Yaowei , QU Yonghua . Extracting Canopy Four Geometric-optical Components by Incorporating Illumination Information into a Multi-scale K-means Cluster Method[J]. Journal of Geo-information Science, 2023 , 25(5) : 1037 -1049 . DOI: 10.12082/dqxxkx.2023.220452
表1 4种分类方法的分类结果精度评价Tab. 1 Accuracy assessment of four classification results |
| 制图精度 | 用户精度 | 综合评价指标 | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| lv | STD | ls | STD | dv | STD | ds | STD | lv | sTD | ls | sTD | dv | sTD | ds | sTD | Kappa系数 | STD | |||
| OTSU-EXG | 0.98 | 0.03 | 0.58 | 0.05 | 0.91 | 0.07 | 0.42 | 0.11 | 0.15 | 0.23 | 0.99 | 0.02 | 0.32 | 0.16 | 0.95 | 0.03 | 0.53 | 0.12 | ||
| SHAR-LABFVC | 0.76 | 0.22 | 0.89 | 0.07 | 0.53 | 0.23 | 0.83 | 0.13 | 0.38 | 0.27 | 0.98 | 0.11 | 0.54 | 0.17 | 0.85 | 0.12 | 0.70 | 0.10 | ||
| Fishcr | 0.36 | 0.15 | 0.77 | 0.08 | 0.27 | 0.22 | 0.63 | 0.15 | 0.23 | 0.23 | 0.84 | 0.16 | 0.14 | 0.06 | 0.69 | 0.12 | 0.48 | 0.07 | ||
| MSI-Kmeans | 0.82 | 0.2 | 0.8 | 0.06 | 0.84 | 0.11 | 0.73 | 0.04 | 0.82 | 0.11 | 0.85 | 0.04 | 0.77 | 0.05 | 0.84 | 0.07 | 0.82 | 0.08 | ||
注:lv、ls、dv、ds分别为光照植被、光照土壤、阴影植被、阴影土壤; STD为标准偏差。 |
| [1] |
|
| [2] |
|
| [3] |
王聪, 杜华强, 周国模, 等. 基于几何光学模型的毛竹林郁闭度无人机遥感定量反演[J]. 应用生态学报, 2015, 26(5):1501-1509.
[
|
| [4] |
|
| [5] |
高泽宾, 屈永华. 自然光照条件下植被几何光学四分量的提取算法[J]. 中国图象图形学报, 2019, 24(10):1790-1800.
[
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
李凯, 张建华, 冯全, 等. 复杂背景与天气条件下的棉花叶片图像分割方法[J]. 中国农业大学学报. 2018, 23(2):88-98.
[
|
| [11] |
|
| [12] |
中国科学院西北生态环境资源研究院. 中国科学院黑河遥感试验研究站[J]. 中国科学院院刊, 2020, 35(11):1424-1426.
[Northwest Institute of Eco-Environment and Resources, CAS. Heihe remote sensing experimental research station[J]. Bulletin of Chinese Academy of Sciences, 2020, 35(11):1424-1426,1429. ]
|
| [13] |
孙赛钰, 王维真, 徐菲楠. 黑河流域中上游水热通量足迹模型的对比分析[J]. 遥感技术与应用, 2021, 36(4):887-897.
[
|
| [14] |
黄巧义, 樊小林, 张木, 等. 水稻冠层图像分割方法对比研究[J]. 中国生态农业学报, 2018, 26(5):710-718.
[
|
| [15] |
周俊, 王明军, 邵乔林. 农田图像绿色植物自适应分割方法[J]. 农业工程学报, 2013, 29(18):163-170.
[
|
| [16] |
张智韬, 于广多, 吴天奎, 等. 基于无人机遥感影像的玉米冠层温度提取及作物水分胁迫监测[J]. 农业工程学报, 2021, 37(23):82-89.
[
|
| [17] |
曾艳阳, 谢高森, 张建春. 基于截距直方图和Otsu融合的弱光图像分割[J]. 激光与光电子学进展, 2021, 58(20):219-227.
[
|
| [18] |
韩青松, 贾振红, 杨杰, 等. 基于改进的Otsu算法的遥感图像阈值分割[J]. 激光杂志, 2010, 31(6):33-34.
[
|
| [19] |
赵博, 宋正河, 毛文华, 等. 基于PSO与K-均值算法的农业超绿图像分割方法[J]. 农业机械学报, 2009, 40(8):166-169.
[
|
| [20] |
|
| [21] |
张志斌, 罗锡文, 臧英, 等. 基于颜色特征的绿色作物图像分割算法[J]. 农业工程学报, 2011, 27(7):183-189.
[
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
张敏, 袁辉. 拉依达(PauTa)准则与异常值剔除[J]. 郑州工业大学学报. 1997, 18(1):87-91.
[
|
| [26] |
|
| [27] |
|
| [28] |
周力凯, 江雨洋, 冯亚春, 等. 基于多尺度区域与类不确定性理论的局部阈值分割方法[J]. 计算机应用, 2020, 40(S2):66-72.
[
|
| [29] |
|
| [30] |
|
| [31] |
杨晓倩, 贾振红, 杨杰, 等. 基于小波变换和Retinex结合的遥感图像的薄云去除[J]. 激光杂志, 2019, 40(10):77-80.
[
|
| [32] |
张淑芳, 刘孟娅, 韩泽欣, 等. 基于Retinex增强的单幅LDR图像生成HDR图像方法[J]. 计算机辅助设计与图形学学报, 2018, 30(6):1015-1022.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}