
Journal of Geo-information Science >
Construction of Ship Activity Knowledge Graph Using Trajectory Semantics
Received date: 2021-10-10
Revised date: 2021-12-17
Online published: 2023-06-02
Supported by
National Natural Science Foundation of China(41801313)
National Natural Science Foundation of China(41901397)
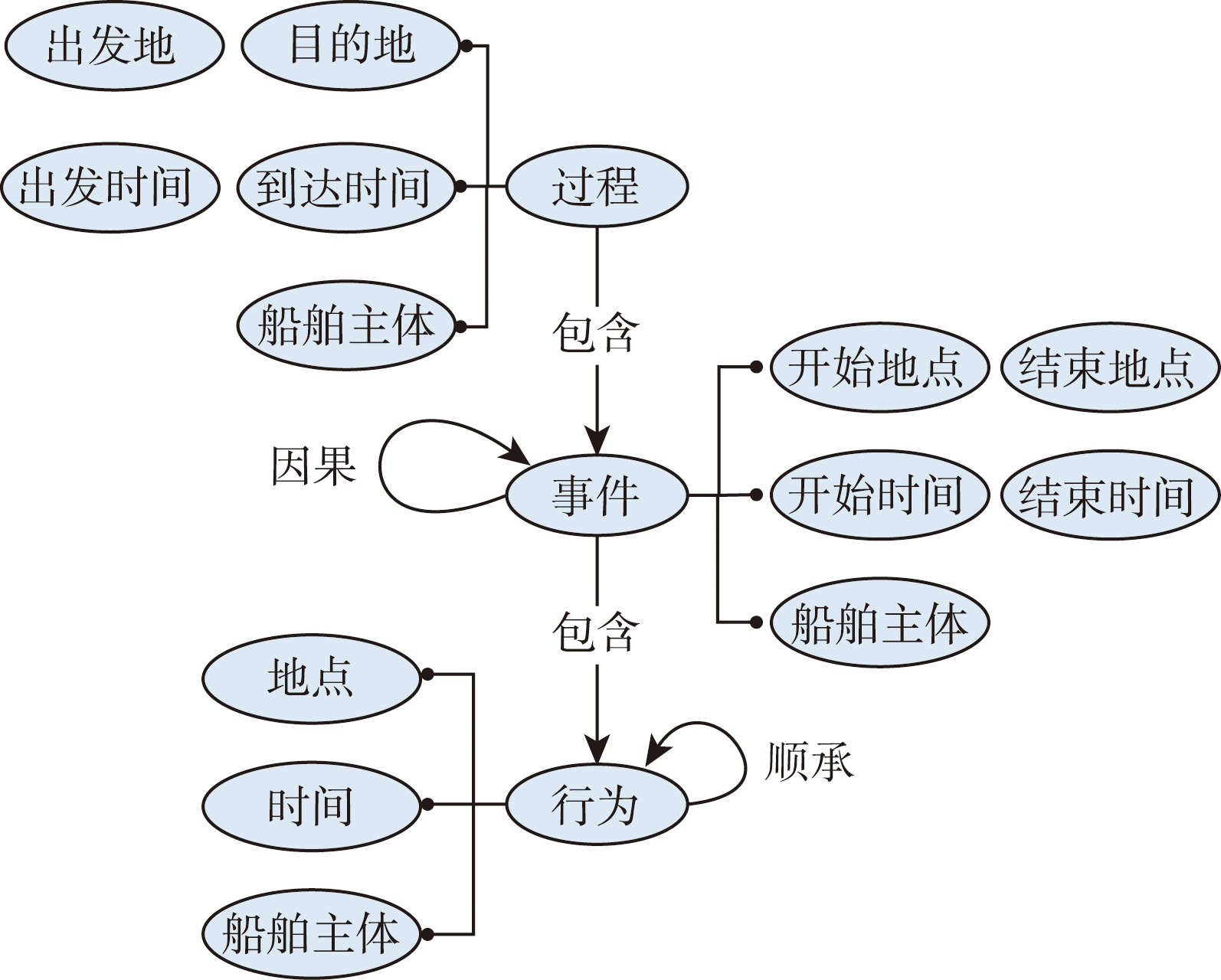
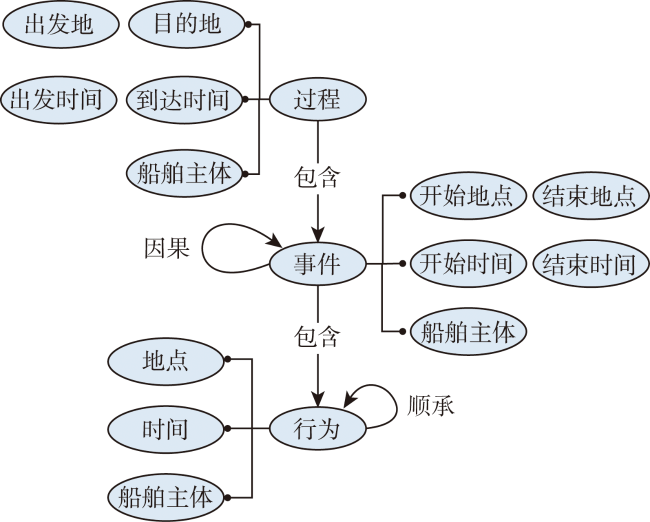
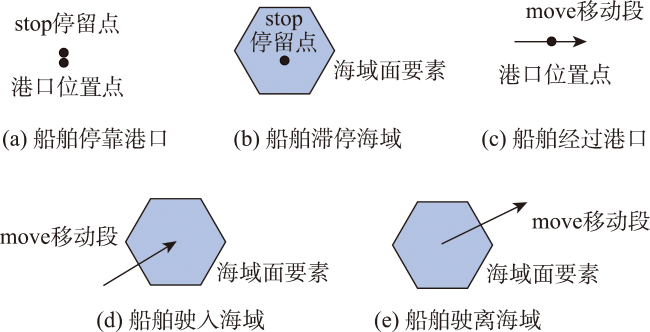
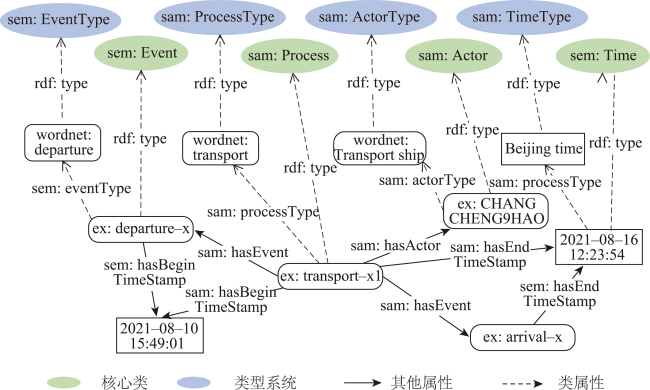
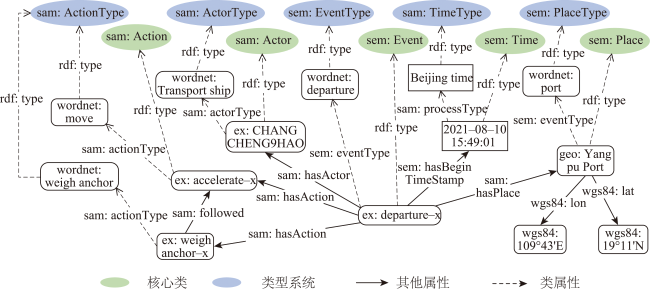
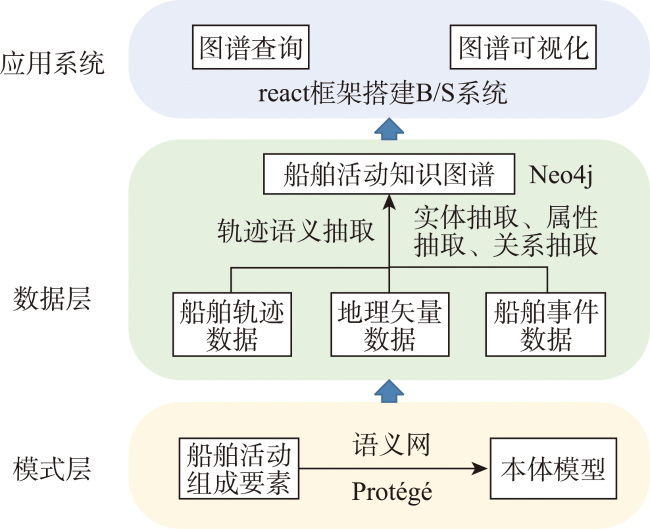
With the deepening of global economic integration, maritime traffic congestion and ship accidents occur frequently. In order to supervise and analyze the marine ship activities, the traditional methods mainly use the ship positioning data for data mining without combining other marine multi-source data for the analysis of ship spatiotemporal activity process and behavior pattern, and thus lack deep knowledge mining. Therefore, this paper makes comprehensive use of multi-source data and constructs the ship activity knowledge map based on extracting the semantic information of trajectory, which provides an effective way for the transformation of trajectory spatiotemporal point sequence with low knowledge density to high-order semantic knowledge. Specifically, firstly, by analyzing the characteristics and constituent elements of ship activities, the ontology layer of ship activity knowledge map is designed based on the core idea of "process-event-behavior"; Then, the track semantic information is extracted by Stop/Move model, and the ship emergencies are extracted by DMCNN model to complete the filling of instance layer; Finally, the above model and method are verified by constructing a prototype system. The results show that the ship activity knowledge map constructed in this paper can support the knowledge representation of ship routine activities and emergencies, and realize spatiotemporal activity query and backtracking, so as to achieve the effect of semantic enhancement, which has a certain application value.
LIU Jianxiang , CHEN Xiaohui , LIU Haiyan , ZHANG Bing , XU Li , LIU Tao , FU Yumeng . Construction of Ship Activity Knowledge Graph Using Trajectory Semantics[J]. Journal of Geo-information Science, 2023 , 25(6) : 1252 -1266 . DOI: 10.12082/dqxxkx.2023.210631
表1 船舶活动语义关联关系Tab. 1 Semantic association of ship activities |
| 语义关系 | SAM表达 | 主体 | 客体 |
|---|---|---|---|
| 包含关系 | sam:hasAction | 事件 | 行为 |
| sam:hasEvent | 过程 | 事件 | |
| 因果关系 | sam:cause | 事件 | 事件 |
| 顺承关系 | sam:followed | 行为 | 行为 |
| 算法1:AE (S,P) |
|---|
| 1 A = {},W = {}, 2 if Distance(s1,P) < y1 then |
| 3 A1,W1 |
| 4 A1.Time = s1.Time_start |
| 5 W1.Time = s1.Time_end 6 A1.Actor = W1.Actor = s1. Actor 7 A1.Place = W1. Place = s1.Place 8 return A1,W1 9 end |
| 算法2:EE (W2, Ac2) |
|---|
| 1 D = {} 2 if | W2.Time, Ac2.Time | < y2 then |
| 3 D2 |
| 4 D2.Time = W2.Time |
| 5 D2.Place = W2. Place 6 D2.Actor = W2.Actor = Ac2. Actor 7 return D2 8 end |
| 算法3:PE (D3,Ar) |
|---|
| 1 Pr = {}2 if Ar3.Time - D3.Time is MIN and |
| 3 Ar3.Actor = D3. Actor then Pr3 |
| 4 Pr3.Time_start = D3.Time |
| 5 Pr3.Place_start = D3. Place6 Pr3.Time_end = Ar3.Time7 Pr3.Place_end = Ar3. Place8 return Pr39 end |
表2 事件抽取指标Tab. 2 Event extraction index |
| 参数 | DMCNN |
|---|---|
| trigger_p | 0.866 688 610 928 241 9 |
| trigger_r | 0.856 752 432 155 657 7 |
| trigger_f | 0.857 154 804 574 158 9 |
| [1] |
|
| [2] |
|
| [3] |
船讯网.[DB/OL].[2021-10-10]. http://www.shipxy.com/
[ Ship information network.[DB/OL]. [2021-10-10]. http://www.shipxy.com/ ]
|
| [4] |
沸腾环贸.[DB/OL].[2021-10-10]. http://www.gogotrade.info/
[Boiling ring trade.[DB/OL]. [2021-10-10]. http://www.gogotrade.info/ ]
|
| [5] |
赵斌, 韩晶晶, 史覃覃, 等. 语义轨迹建模与挖掘研究进展[J]. 地球信息科学学报, 2020, 22(4):842-856.
[
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
龚健雅. GIS中面向对象时空数据模型[J]. 测绘学报, 1997(4):10-19.
[
|
| [11] |
舒红, 陈军, 杜道生, 等. 面向对象的时空数据模型[J]. 武汉大学学报·信息科学版, 1997, 22(3):229-233.
[
|
| [12] |
宋玮, 王家耀, 郭金华. 面向对象时空数据模型的研究[J]. 测绘科学技术学报, 2006, 23(4):235-238.
[
|
| [13] |
卢华兴, 刘学军, 任政, 等. 一种面向对象的GIS时空数据模型[J]. 辽宁工程技术大学学报(自然科学版), 2008, 27(3):346-349.
[
|
| [14] |
|
| [15] |
程昌秀, 周成虎, 陆锋. 对象关系型GIS中改进基态修正时空数据模型的实现[J]. 中国图象图形学报, 2003, 8(6):697-702.
[
|
| [16] |
余志文, 张利田, 邬永宏. 基态修正时空数据模型的进一步扩展[J]. 中山大学学报(自然科学版), 2003, 42(1):100-103.
[
|
| [17] |
|
| [18] |
薛存金, 周成虎, 苏奋振, 等. 面向过程的时空数据模型研究[J]. 测绘学报, 2010, 39(1):95-101.
[
|
| [19] |
|
| [20] |
陈新保,
[
|
| [21] |
尹章才, 李霖, 艾自兴. 基于图论的时空数据模型研究[J]. 测绘学报, 2003, 32(2):168-172.
[
|
| [22] |
黄照强, 冯学智. 基于PETRI网的土地变更时空过程建模[J]. 测绘学报, 2005, 34(3):239-245.
[
|
| [23] |
尹章才, 李霖. 基于Petri网的时空数据模型研究[J]. 武汉大学学报·信息科学版, 2004, 29(8):740-743.
[
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
杜志强, 李钰, 张叶廷, 等. 自然灾害应急知识图谱构建方法研究[J]. 武汉大学学报·信息科学版, 2020, 45(9):1344-1355.
[
|
| [30] |
高嘉良, 仇培元, 余丽, 等. 基于旅游知识图谱的可解释景点推荐[J]. 中国科学:信息科学, 2020(7):1055-1068.
[
|
| [31] |
林珲, 游兰, 胡传博, 等. 时空大数据时代的地理知识工程展望[J]. 武汉大学学报·信息科学版, 2018, 43(12):452-458.
[
|
| [32] |
陆锋, 余丽, 仇培元. 论地理知识图谱[J]. 地球信息科学学报, 2017, 19(6):723-734.
[
|
| [33] |
许珺, 裴韬, 姚永慧. 地学知识图谱的定义,内涵和表达方式的探讨[J]. 地球信息科学学报, 2010, 12(4):496-502,509.
[
|
| [34] |
张洪岩, 周成虎, 闾国年, 等. 试论地学信息图谱思想的内涵与传承[J]. 地球信息科学学报, 2020, 22(4):653-661.
[
|
| [35] |
周成虎, 孙九林, 苏奋振, 等. 地理信息科学发展与技术应用[J]. 地理学报, 2020, 75(12):2593-2609.
[
|
| [36] |
张雪英, 张春菊, 吴明光, 等. 顾及时空特征的地理知识图谱构建方法[J]. 中国科学:信息科学, 2020, 50(7):1019-1032.
[
|
| [37] |
陈晓慧, 刘俊楠, 徐立, 等. COVID-19病例活动知识图谱构建——以郑州市为例[J]. 武汉大学学报·信息科学版, 2020, 45(6):816-825.
[
|
| [38] |
|
| [39] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}