
Journal of Geo-information Science >
Travel Time Estimation Method based on Dual Graph Convolutional Networks via Joint Modeling of Road Segments and Intersections
Received date: 2022-10-10
Revised date: 2023-01-05
Online published: 2023-06-30
Supported by
National Natural Science Foundation of China(62073333)
National Natural Science Foundation of China(72201029)
National Natural Science Foundation of China(72288101)
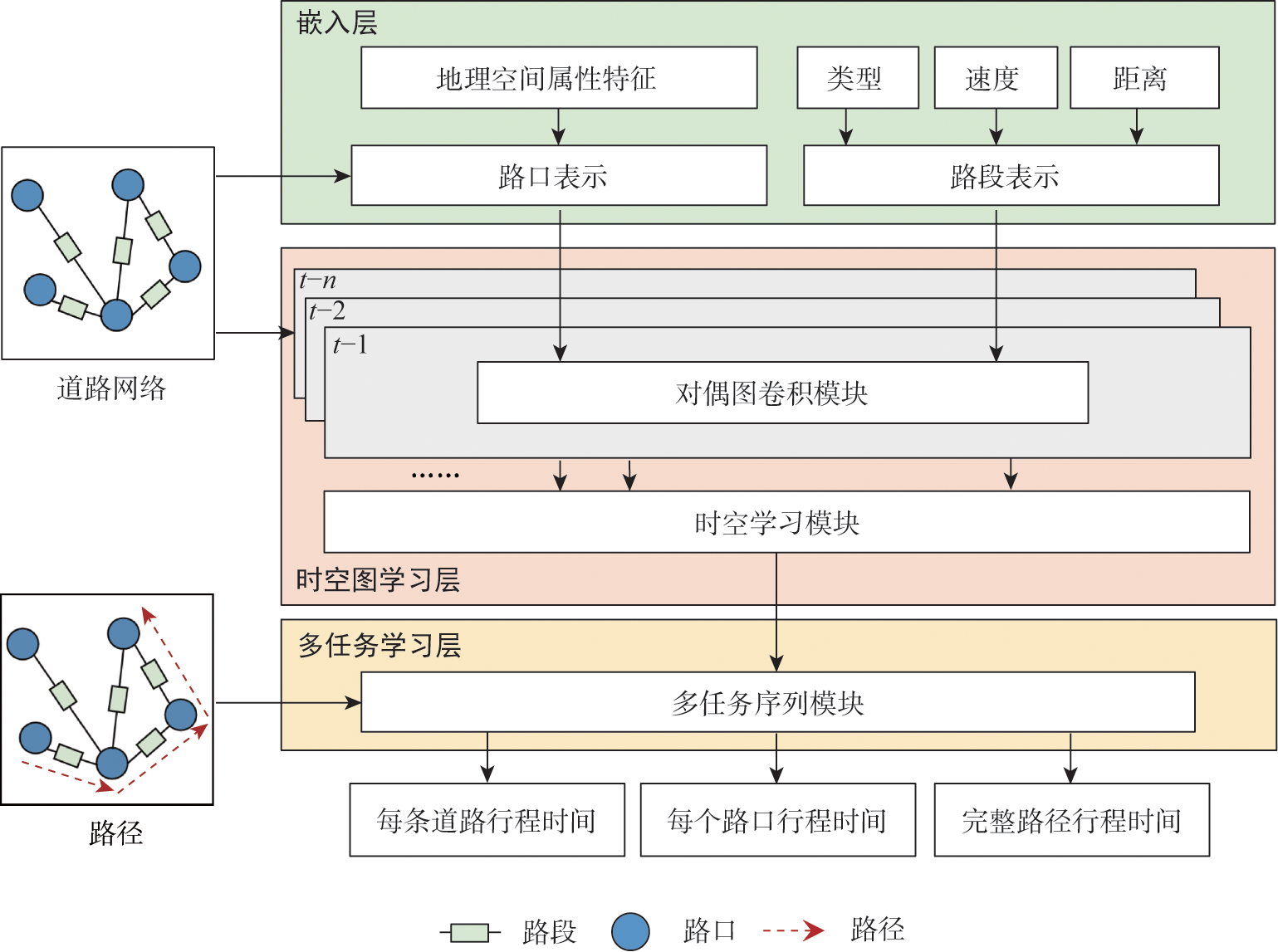
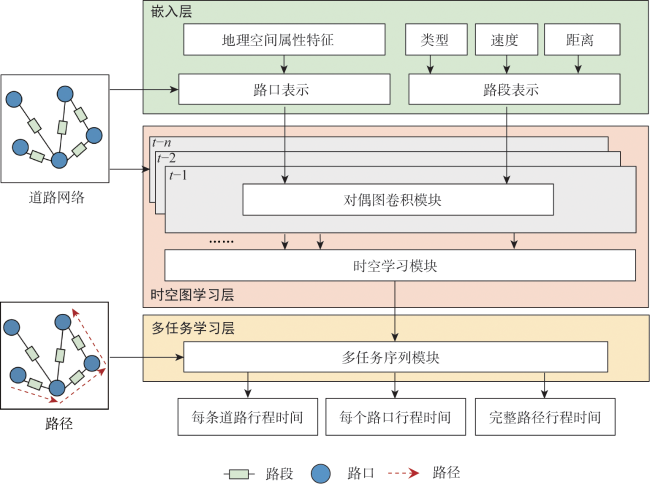
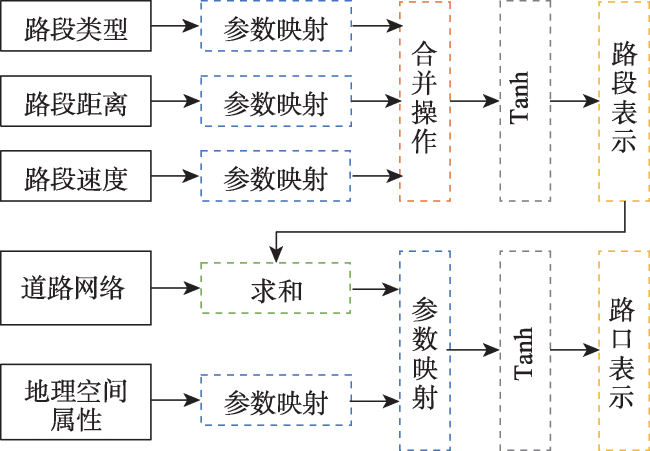
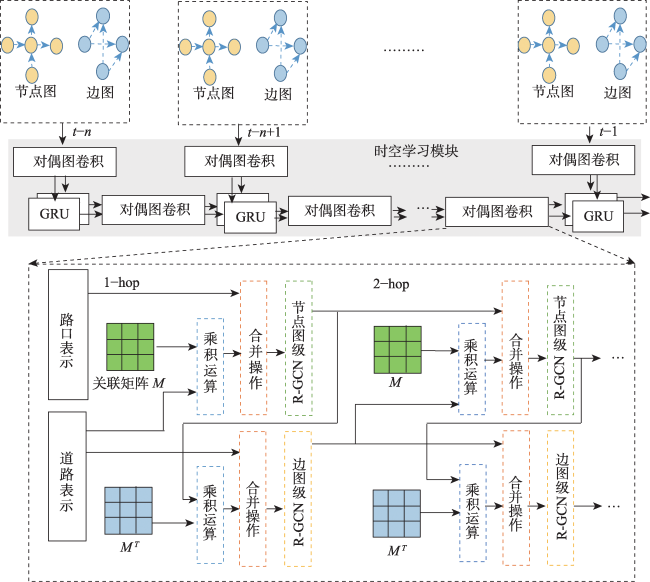
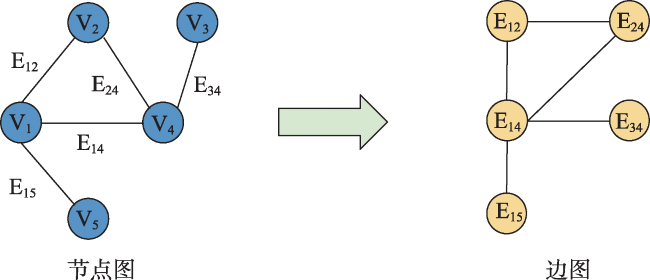
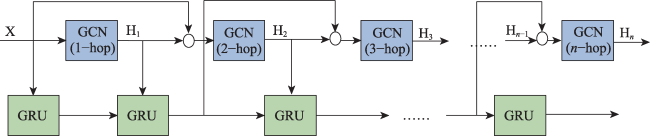
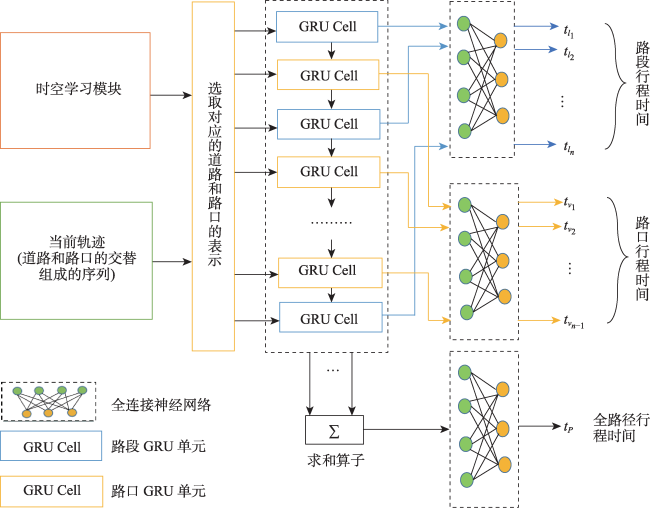
Estimating travel time for a given route plays an important role in many urban transportation systems, such as navigation and route planning. However, most of the existing works focus on modeling road segments or intersections individually, which cannot accurately estimate travel time, because intersections and road segments, as the basic elements of paths, not only contain diverse spatial attributes and temporal dynamics, but also have strong coupling correlation between them. To address the above problems, this paper proposes a novel end-to-end deep learning framework, Dual Graph Convolutional Network for Travel Time Estimation (DGCN-TTE), to jointly model intersections and road segments. Specifically, we adopt a dual graph convolution method to capture the complex relationship between intersections and road segments, in which a node-wise graph is constructed to characterize the correlation between intersections, and an edge-wise graph is constructed to characterize the interaction features between road segments. To capture the joint relationship of spatial and temporal features, we also introduce a spatiotemporal learning module that integrates multi-scale spatial relationships from multiple neighborhood scales while capturing temporal dependencies. This paper evaluates the proposed DGCN-TTE model through experiments on three real-world trajectory datasets, the results show that the proposed model significantly outperforms existing methods, and the evaluation metrics can achieve more than 10% improvement compared with the suboptimal method.
JIN Guangyin , SHA Hengyu , ZHANG Jinlei , HUANG Jincai . Travel Time Estimation Method based on Dual Graph Convolutional Networks via Joint Modeling of Road Segments and Intersections[J]. Journal of Geo-information Science, 2023 , 25(7) : 1500 -1513 . DOI: 10.12082/dqxxkx.2023.220768
表1 实验数据集的基本信息Tab. 1 Basic information of the experimental dataset |
| 数据集 | 成都 | 波尔图 | 北京 |
|---|---|---|---|
| 轨迹数量/条 | 15 303 | 12 683 | 346 96 |
| 路段数量/条 | 873 | 544 | 714 |
| 路口数量/个 | 807 | 450 | 320 |
| 平均行程时间/s | 246.54 | 248.49 | 343.3 |
| 平均移动距离/m | 1435.34 | 1394.82 | 3929.7 |
表2 成都数据集在郊区、高峰和非高峰3个场景下的数值统计Tab. 2 Numerical statistics of Chengdu dataset in suburban, peak and off-peak scenarios |
| 场景 | 郊区 | 高峰时间 | 非高峰时间 |
|---|---|---|---|
| 轨迹数量/条 | 8 156 | 2 867 | 12 436 |
| 路段数量/条 | 639 | 873 | 873 |
| 路口数量/个 | 291 | 807 | 807 |
| 平均行程时间/s | 242.42 | 249.81 | 243.57 |
| 平均移动距离/m | 1 105.42 | 1 435.47 | 1 435.31 |
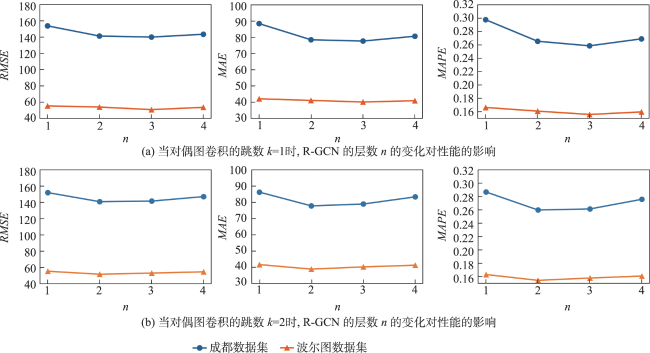
图7 模型在不同参数组合下的性能变化Fig. 7 The performance of the model under different parameter combinations |
表3 DGCN-TTE及其变体在2个数据集上估计路径行程时间的性能Tab. 3 Performance of DGCN-TTE under different combinations of k and n |
| 参数组合 | 成都数据集 | 波尔图数据集 | |||||
|---|---|---|---|---|---|---|---|
| RMSE | MAE | MAPE | RMSE | MAE | MAPE | ||
| (1,1) | 154.11 | 88.34 | 0.297 5 | 55.52 | 42.03 | 0.166 3 | |
| (1,2) | 141.60 | 78.39 | 0.265 3 | 54.12 | 41.03 | 0.160 8 | |
| (1,3) | 140.30 | 77.60 | 0.258 5 | 50.95 | 40.06 | 0.155 8 | |
| (1,4) | 143.78 | 80.55 | 0.268 9 | 53.76 | 40.83 | 0.159 6 | |
| (2,1) | 151.67 | 86.23 | 0.286 5 | 54.84 | 41.62 | 0.163 1 | |
| (2,2) | 140.52 | 77.78 | 0.259 6 | 51.17 | 38.83 | 0.154 4 | |
| (2.3) | 141.22 | 78.92 | 0.261 2 | 52.59 | 40.20 | 0.157 9 | |
| (2,4) | 146.75 | 83.32 | 0.275 6 | 54.12 | 41.24 | 0.160 8 | |
注:表中加粗数字表示评估指标的最佳性能。 |
表4 DGCN-TTE 和其他方法在3个数据集上估计路径行程时间的性能Tab. 4 Performance of DGCN-TTE and other methods for estimating travel time on three datasets |
| 算法 | 成都数据集 | 波尔图数据集 | 北京数据集 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | MAE | MAPE | RMSE | MAE | MAPE | RMSE | MAE | MAPE | |||
| AVG | 202.43 | 132.86 | 0.640 4 | 111.67 | 88.75 | 0.4509 | 338.43 | 264.55 | 0.736 7 | ||
| TEMP | 167.41 | 108.50 | 0.553 8 | 98.01 | 78.12 | 0.4127 | 342.08 | 272.46 | 1.642 5 | ||
| GBDT | 165.03 | 101.68 | 0.542 8 | 91.24 | 71.79 | 0.3914 | 372.87 | 262.49 | 0.685 4 | ||
| MlpTTE | 150.67 | 87.32 | 0.307 6 | 59.46 | 44.49 | 0.1783 | 124.92 | 79.75 | 0.253 2 | ||
| RnnTTE | 155.16 | 89.37 | 0.301 1 | 56.45 | 43.32 | 0.1702 | 127.80 | 86.59 | 0.292 4 | ||
| DeepTTE | 148.30* | 86.40 | 0.298 4 | 57.32 | 43.54 | 0.1686 | 147.60 | 92.64 | 0.250 0 | ||
| T-GCN | 153.49 | 87.71 | 0.291 8 | 56.35 | 43.28 | 0.1678 | 129.56 | 85.66 | 0.275 8 | ||
| DRCNN | 151.59 | 86.14* | 0.288 4 | 54.73* | 41.81* | 0.1673* | 116.30 | 76.71 | 0.256 1 | ||
| ConSTGAT | 152.23 | 87.10 | 0.284 5* | 56.67 | 43.22 | 0.1684 | 107.58* | 69.90* | 0.228 8* | ||
| GCNAttTTE | 152.95 | 87.41 | 0.289 8 | 55.88 | 42.79 | 0.1654 | 112.88 | 73.82 | 0.237 2 | ||
| DGCN-TTE | 140.30 | 77.60 | 0.258 5 | 50.95 | 40.06 | 0.1558 | 96.27 | 63.02 | 0.214 5 | ||
| 提升比例/% | 5.39 | 9.91 | 9.14 | 6.90 | 4.19 | 4.83 | 10.51 | 9.84 | 6.25 | ||
注:表中加粗数字表示评估指标的最佳性能。 |
表5 DGCN-TTE 和其他方法在3个数据集上估计路径行程时间的性能Tab. 5 Performance of DGCN-TTE and other graph learning-based methods for estimating road segment travel time on three datasets |
| 算法 | 成都数据集 | 波尔图数据集 | 北京数据集 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | MAE | MAPE | RMSE | MAE | MAPE | RMSE | MAE | MAPE | |||
| T-GCN | 57.84 | 24.85 | 0.553 7 | 22.48 | 13.03 | 0.552 1 | 47.06/- | 23.87/- | 0.588 6/- | ||
| DRCNN | 57.82 | 24.76 | 0.551 3 | 20.59 | 11.68 | 0.460 5 | 49.14/- | 26.23/- | 0.630 6/- | ||
| ConSTGAT | 58.17 | 24.55 | 0.550 3 | 21.76 | 12.23 | 0.486 5 | 47.26/- | 21.64/- | 0.507 4/- | ||
| GCNAttTTE | 58.26 | 24.79 | 0.551 2 | 19.89 | 10.95 | 0.432 3 | 45.31/22.88 | 21.50/10.12 | 0.488 4/0.466 5 | ||
| DGCN-TTE | 55.91 | 22.88 | 0.512 2 | 15.81 | 8.06 | 0.301 6 | 41.34/20.60 | 18.87/8.04 | 0.441 4/0.370 7 | ||
注:表中加粗数字表示评估指标的最佳性能。 |
表6 DGCN-TTE和其他方法在3种场景下估计路径行程时间的性能Tab. 6 Performance of DGCN-TTE and other methods for estimating travel time in three scenarios |
| 算法 | 郊区 | 高峰时段 | 非高峰时段 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | MAE | MAPE | RMSE | MAE | MAPE | RMSE | MAE | MAPE | |||
| AVG | 159.14 | 110.85 | 0.517 7 | 177.83 | 137.24 | 0.688 7 | 159.25 | 122.93 | 0.630 7 | ||
| TEMP | 148.26 | 101.43 | 0.458 9 | 156.97 | 112.18 | 0.512 0 | 150.12 | 115.24 | 0.493 6 | ||
| GBDT | 136.19 | 83.77 | 0.373 9 | 142.58 | 91.48 | 0.397 5 | 138.75 | 82.15 | 0.356 8 | ||
| MlpTTE | 125.49 | 78.48 | 0.293 8 | 131.78 | 87.64 | 0.311 5 | 127.11 | 79.67 | 0.311 9 | ||
| RnnTTE | 121.75 | 76.64 | 0.281 7 | 126.43 | 84.87 | 0.296 8 | 122.50 | 83.69 | 0.302 0 | ||
| DeepTTE | 114.47 | 72.55 | 0.287 9 | 129.45 | 87.67 | 0.312 1 | 123.36 | 83.97 | 0.296 8 | ||
| T-GCN | 121.58 | 76.38 | 0.277 5 | 132.05 | 89.74 | 0.303 9 | 121.21 | 83.17 | 0.290 5 | ||
| DRCNN | 120.34 | 75.40 | 0.274 8 | 131.22 | 89.10 | 0.297 6 | 120.76 | 82.78 | 0.285 3 | ||
| ConSTGAT | 118.89 | 72.12 | 0.264 8 | 128.79 | 88.06 | 0.293 0 | 118.64 | 81.89 | 0.282 1 | ||
| GCNAttTTE | 111.87 | 68.63 | 0.242 1 | 117.13 | 78.45 | 0.272 9 | 105.81 | 71.05 | 0.257 9 | ||
| DGCN-TTE | 159.14 | 110.85 | 0.517 7 | 177.83 | 137.24 | 0.688 7 | 159.25 | 122.93 | 0.630 7 | ||
注:表中加粗数字表示评估指标的最佳性能。 |
表7 DGCN-TTE及其变体在2个数据集上估计路径行程时间的性能Tab. 7 Performance of DGCN-TTE and its variants in estimating travel time on two datasets |
| 变体模型 | 成都数据集 | 波尔图数据集 | |||||
|---|---|---|---|---|---|---|---|
| RMSE | MAE | MAPE | RMSE | MAE | MAPE | ||
| DGCN-TTE w/o R-GCN | 146.78 | 82.03 | 0.273 2 | 51.64 | 40.82 | 0.158 8 | |
| DGCN-TTE w/o RNN | 147.48 | 83.46 | 0.276 4 | 54.07 | 41.13 | 0.162 6 | |
| DGCN-TTE w/o Intersection | 143.82 | 79.59 | 0.264 2 | 53.96 | 41.02 | 0.161 0 | |
| DGCN-TTE Simple GCN | 144.56 | 80.21 | 0.270 9 | 53.87 | 40.95 | 0.162 2 | |
| DGCN-TTE | 140.30 | 77.60 | 0.258 5 | 50.95 | 40.06 | 0.155 8 | |
注:表中加粗数字表示评估指标的最佳性能。 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}