
Journal of Geo-information Science >
Urban Road Boundary Extraction Method based on Local Feature Constraints of Scanline for Vehicle-borne LiDAR Point Cloud
Received date: 2022-10-15
Revised date: 2023-02-04
Online published: 2023-07-14
Supported by
National Natural Science Foundation of China(41871379)
Liaoning Revitalization Talents Program(XLYC2007026)
Liaoning Province Applied Basic Research Program(2022JH2/101300273)
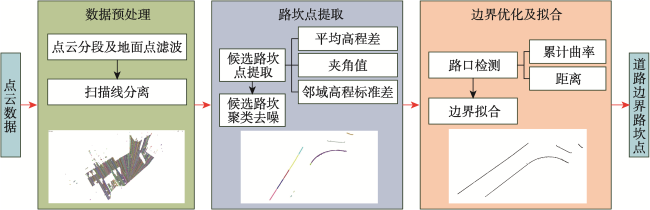
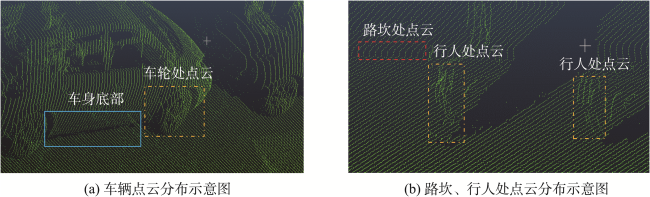
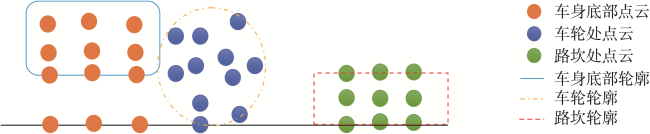
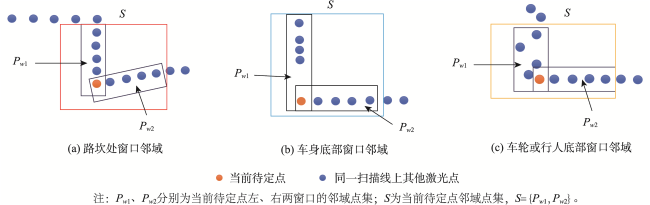
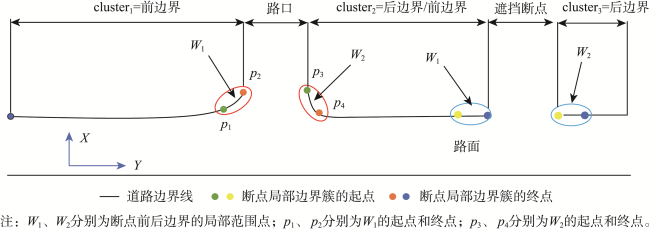
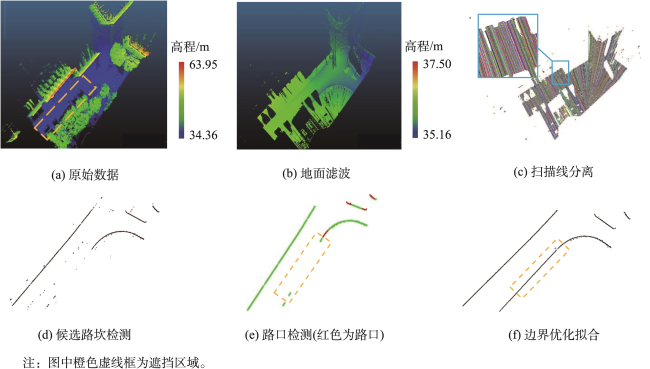
The road boundary extraction from the vehicle-borne LiDAR point cloud can be easily affected by the occlusion of vehicles and pedestrians in urban environment. These occlusion phenomena will cause two problems: one is the generation of pseudo-boundary points, and the other is the discontinuity of boundary lines. We find that the elevation standard deviation constraint can effectively deal with the problems caused by occlusion. First, data pre-processing is carried out, including point cloud subdivision, cloth simulation filtering, and scanline storage. Second, a continuous double window is established based on scanlines. The bidirectional moving window method is adopted to construct elevation difference constraint, angle value constraint, and elevation standard deviation constraint to obtain candidate road points. Then, based on the continuity of road boundary, the DBSCAN algorithm in density clustering is used to generate relatively continuous and accurate road boundary points. Finally, the cumulative curvature value and distance of the boundary breakpoint region are calculated to determine whether a location is a junction. The boundary breakpoint is not considered connected if it is a junction; otherwise, it is regarded as a breakpoint caused by vehicle or pedestrian occlusion. The quadratic polynomial curve is used to smooth the boundary points, and the mathematical parameter model of the boundary is obtained. The experimental results show that the accuracy of road boundary extraction can exceed 80% in an urban environment with more occlusion.

DONG Xiao , WANG Jingxue , ZHANG Chenglong . Urban Road Boundary Extraction Method based on Local Feature Constraints of Scanline for Vehicle-borne LiDAR Point Cloud[J]. Journal of Geo-information Science, 2023 , 25(8) : 1546 -1558 . DOI: 10.12082/dqxxkx.2023.220792
表1 不同方法处理遮挡问题的特点Tab. 1 Characteristics of different methods to deal with occlusion problems |
| 优点 | 缺点 | |
|---|---|---|
| 点云栅格化方法 | 能够结合图像处理技术 | 受网格大小影响、对于遮挡格网无法有效确定格网属性 |
| 聚类分析方法 | 抗噪性强 | 计算量大、聚类效果难以控制 |
| 机器学习方法 | 适应性、自动 性强 | 需要具有完备的样本数据 |
| 扫描线方法 | 无遮挡的情况提取精度高 | 遮挡情况下,道路边界提取精度低 |
表2 算法参数设置Tab. 2 Parameter setting |
| 参数 | 参数数值 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 路段1 | 路段2 | 路段3 | 路段4 | ||||||||
| 密度聚类点个数阈值Minpts | 8 | 8 | 8 | 8 | 8 | 15 | 10 | 15 | 15 | 8 | 8 |
| 距离阈值Th_dist/m | 3 | 3 | 10 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |
| 曲率阈值Th_kappa | 1 | 1 | 10 | 1 | 10 | 2 | 5 | 8 | 10 | 2 | 2 |
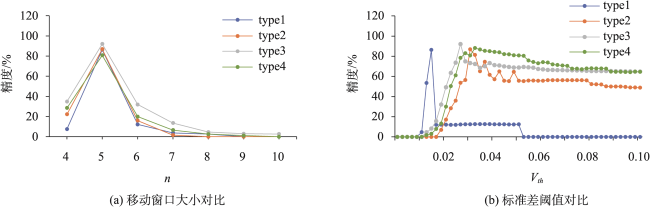
| 高程标准差阈值Vth | 0.030 | 0.030 | 0.014 | 0.023 | 0.023 | 0.016 | 0.030 | 0.020 | 0.030 | 0.030 | 0.023 |
| CSF布料分辨率/m | 1 | ||||||||||
| CSF最大迭代次数 | 500 | ||||||||||
| CSF分类阈值 | 0.5 | ||||||||||
| 扫描线分离距离dth/m | 5 | ||||||||||
| 移动窗口大小n | 5 | ||||||||||
| 平均高程差阈值Δh1、Δh2/m | 0.01、0.03 | ||||||||||
| 夹角阈值Δθ/° | 140 | ||||||||||
| 曲率窗口大小Th_size | 50 | ||||||||||
| 密度聚类Epx/m | 0.4 | ||||||||||
表3 路坎点提取结果Tab. 3 The results of curb points extraction (m) |
| 数据 | LTS | LS | RS | WS | LTD | LD | RD | WD |
|---|---|---|---|---|---|---|---|---|
| 路段1 | 1 012.93 | 504.24 | 508.69 | 6.31 | 977.14 | 485.71 | 491.43 | 6.29 |
| 路段2 | 605.45 | 318.33 | 287.12 | 7.43 | 561.27 | 290.42 | 270.85 | 7.43 |
| 路段3 | 868.98 | 329.55 | 539.43 | 8.73 | 785.12 | 304.22 | 480.90 | 8.67 |
| 路段4 | 866.43 | 430.04 | 436.39 | 7.09 | 764.40 | 381.30 | 383.10 | 6.98 |
表4 精度评定Tab. 4 Accuracy evaluation |
| 数据 | TP/m | FP/m | FN/m | p/% | r/% | q/% |
|---|---|---|---|---|---|---|
| 路段1 | 977.14 | 22.99 | 35.79 | 97.70 | 96.47 | 94.33 |
| 路段2 | 561.27 | 20.66 | 44.18 | 96.45 | 92.70 | 89.64 |
| 路段3 | 785.12 | 28.90 | 83.86 | 96.45 | 90.35 | 87.44 |
| 路段4 | 764.40 | 26.51 | 102.03 | 96.65 | 88.22 | 85.60 |
表5 对比实验参数设置Tab. 5 Comparison of experimental Parameter setting |
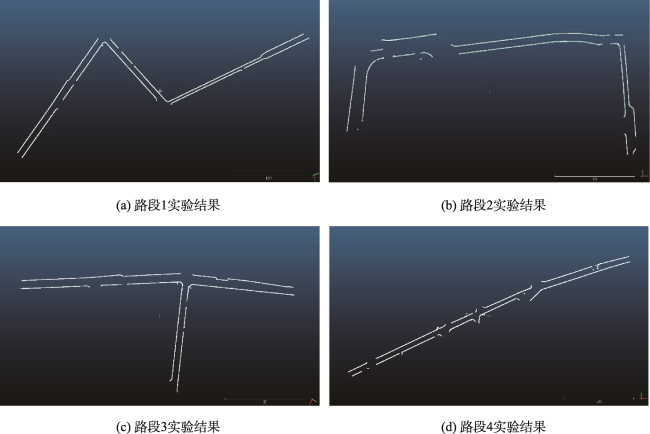
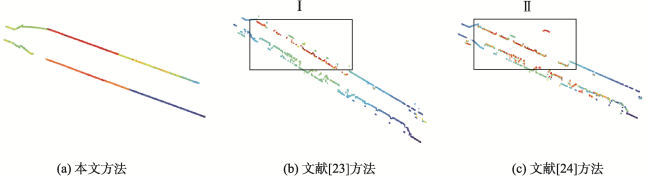
图13 存在车辆遮挡的城区道路(type1)边界点提取结果Fig. 13 The results of curb points extraction in urban roads with vehicle occlusion(type1) |
图14 “T”型交通岗位置(type2)边界点提取结果Fig. 14 The results of curb points extraction in the T-shape intersection(type2) |
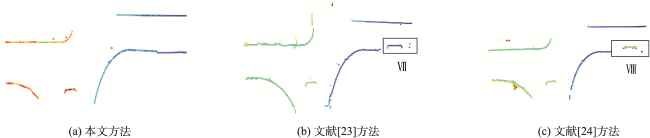
图15 “Y”型交通岗位置(type3)边界点提取结果Fig. 15 The results of curb points extraction in the Y-shape intersection(type3) |
图16 “十”型交通岗位置(type4)边界点提取结果Fig. 16 The results of curb points extraction in the cross-shape intersection(type4) |
表6 对比实验结果评估Tab. 6 Comparison of experimental results |
| 评定准则 | 方法 | 存在车辆遮挡的城区道路 | “T”型交通岗 | “Y”型交通岗 | “十”型交通岗 |
|---|---|---|---|---|---|
| (type1) | (type2) | (type3) | (type4) | ||
| 准确度p /% | 文献[23]方法 | 46.18 | 76.71 | 61.03 | 89.70 |
| 文献[24]方法 | 46.13 | 87.28 | 77.30 | 91.53 | |
| 本文方法 | 95.12 | 94.54 | 99.52 | 96.63 | |
| 完整度r /% | 文献[23]方法 | 40.21 | 82.93 | 76.23 | 87.66 |
| 文献[24]方法 | 44.14 | 80.40 | 77.54 | 83.34 | |
| 本文方法 | 90.32 | 91.49 | 92.46 | 83.10 | |
| 精度q /% | 文献[23]方法 | 27.38 | 66.25 | 51.27 | 79.65 |
| 文献[24]方法 | 29.13 | 71.97 | 63.15 | 77.38 | |
| 本文方法 | 86.32 | 86.90 | 92.05 | 80.76 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
马新江, 刘如飞, 蔡永宁, 等. 一种基于路缘特征的点云道路边界提取方法[J]. 遥感信息, 2019, 34(02):80-85.
[
|
| [5] |
刘如飞, 马新江, 卢秀山, 等. 利用多元LBP特征自动提取城市道路边界[J]. 遥感学报, 2022, 26(3):541-554.
[
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
罗海峰, 方莉娜, 陈崇成. 车载激光扫描数据路坎点云提取方法[J]. 地球信息科学学报, 2017, 19(7):861-871.
[
|
| [11] |
|
| [12] |
|
| [13] |
Balado, Martínez-Sánchez, Arias, et al. Road environment semantic segmentation with deep learning from MLS point cloud data[J]. Sensors, 2019, 19(16):3466. DOI:10.3390/s19163466
|
| [14] |
方莉娜, 杨必胜. 车载激光扫描数据的结构化道路自动提取方法[J]. 测绘学报, 2013, 42(2):260-267.
[
|
| [15] |
续东, 柳景斌, 花向红, 等. 道路空间特征与测量距离相结合的LiDAR道路边界点提取算法[J]. 测绘学报, 2021, 50(11):1534-1545.
[
|
| [16] |
|
| [17] |
|
| [18] |
熊伟成, 杨必胜, 董震. 面向车载激光扫描数据的道路目标精细化鲁棒提取[J]. 地球信息科学学报, 2016, 18(3):376-385.
[
|
| [19] |
李会宾, 史云, 张文利, 等. 基于车载LiDAR的道路边界检测[J]. 测绘工程, 2018, 27(12):37-43.
[
|
| [20] |
|
| [21] |
中华人民共和国住房和城乡建设部. 城市道路工程设计规范: CJJ 37—2012[S]. 北京: 中国建筑工业出版社, 2012.
|
| [22] |
方莉娜, 王康. 基于车载激光点云的道路交叉口检测与识别[J]. 南京信息工程大学学报(自然科学版), 2021, 13(6):635-644.
[
|
| [23] |
马茜芮, 沈月千, 黄腾. 顾及相邻点序号差的路面点云自动提取方法研究[J]. 南京信息工程大学学报(自然科学版), 2021, 13(6):661-668.
[
|
| [24] |
赵焱. 基于车载LiDAR数据的高精地图道路要素提取[D]. 武汉: 武汉大学, 2020.
[
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}