
Journal of Geo-information Science >
Ship Route Extraction Methods and Traffic Flow Analysis
Received date: 2023-02-11
Revised date: 2023-08-22
Online published: 2023-11-02
Supported by
National Natural Science Foundation of China(42201451)
China Postdoctoral Science Foundation(2022M723379)
Jiangsu Province Double Innovation Doctoral Program(JSSCBS20221523)
Open Research Fund of Jiangsu Key Laboratory of Coal-based Greenhouse Gas Control and Utilization(2022KF05)
Fundamental Research Funds for the Central Universities(2022QN1058)
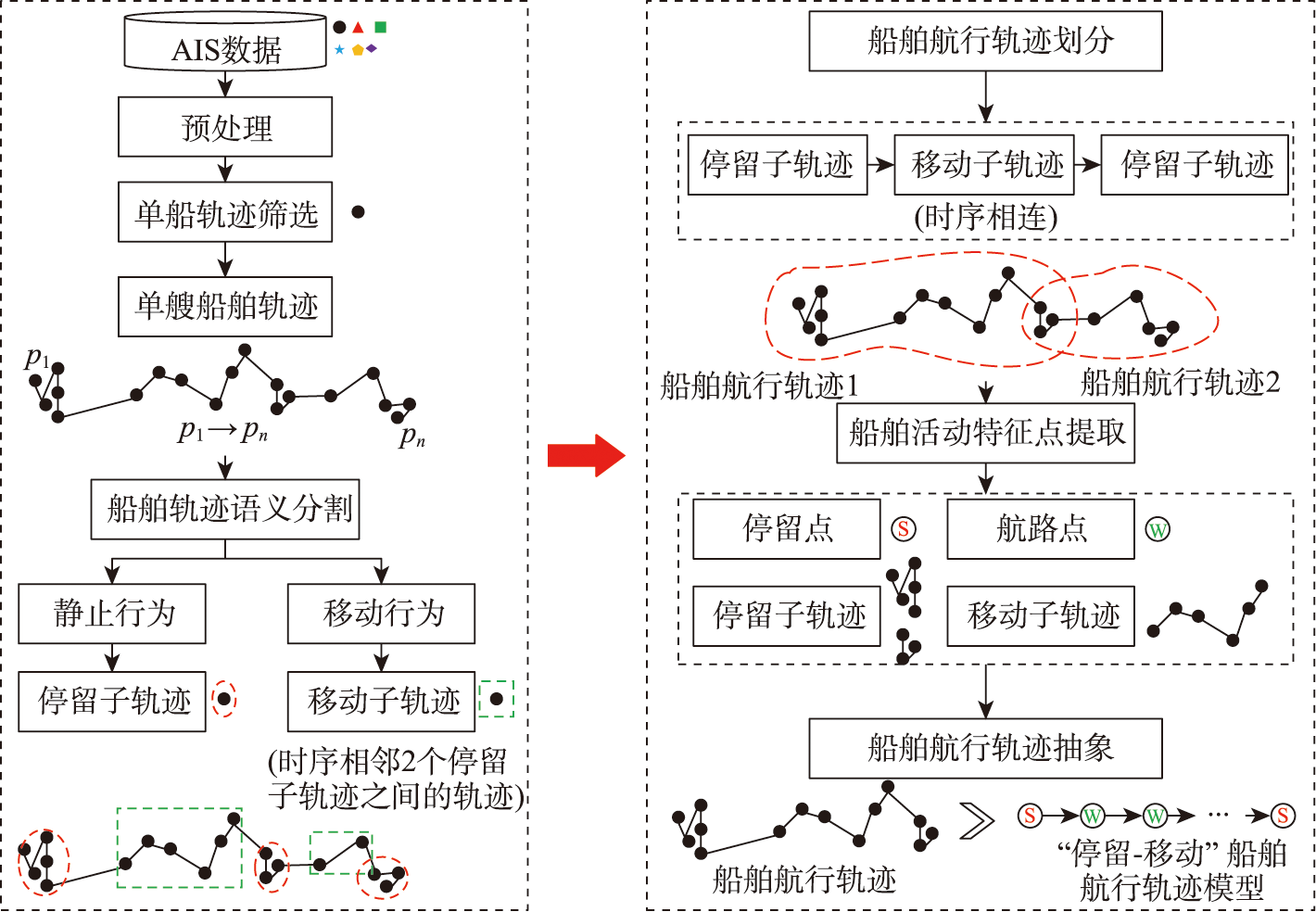
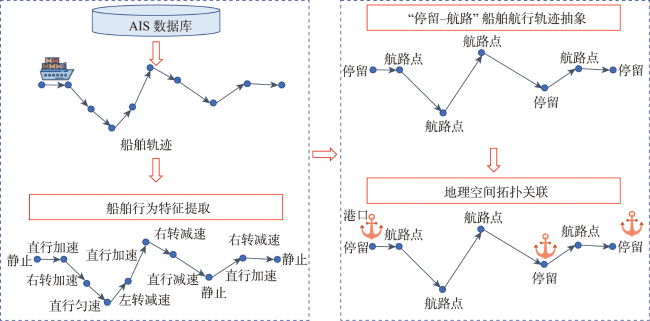
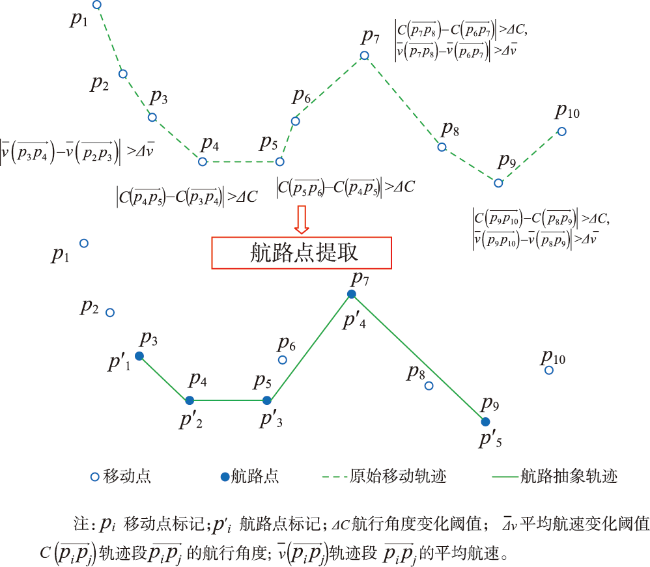
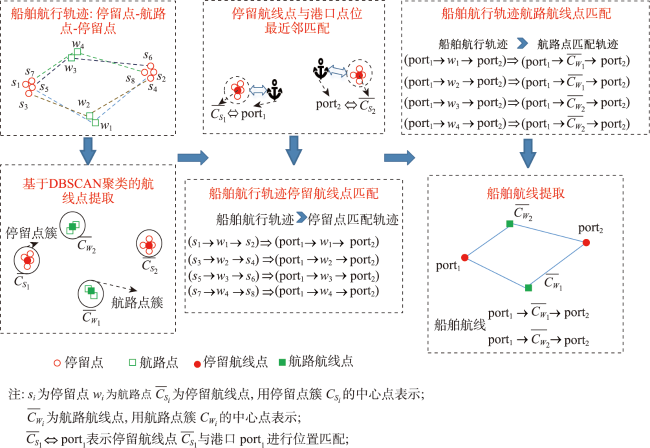
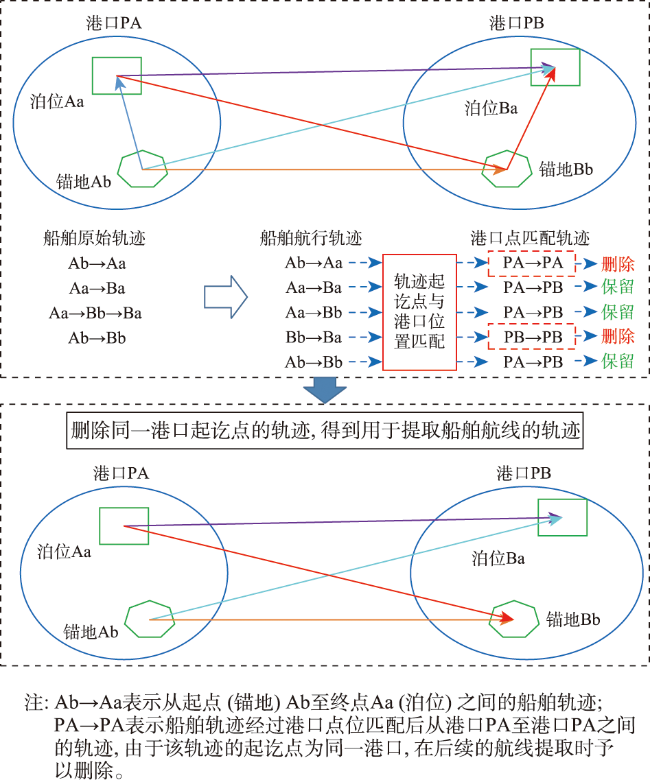
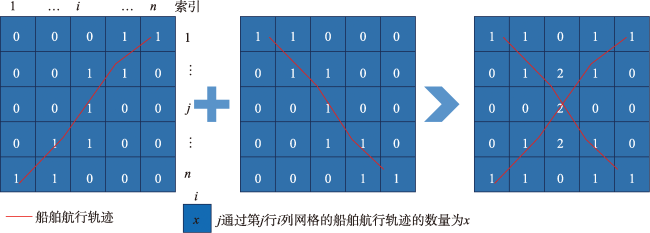
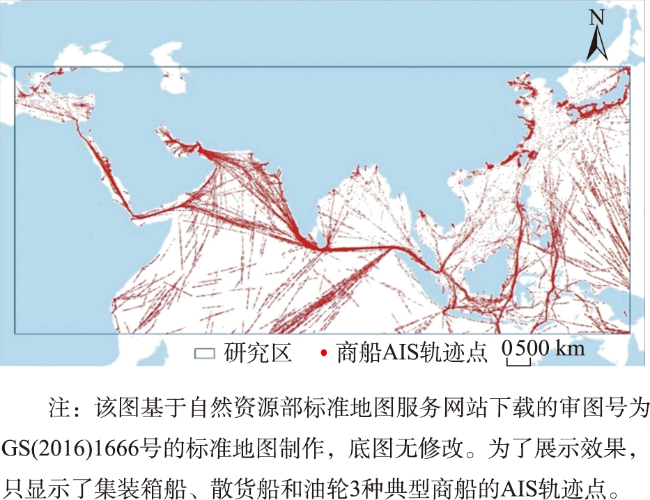
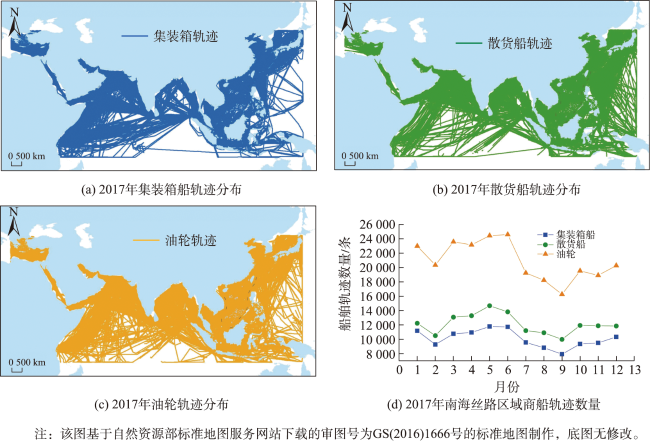
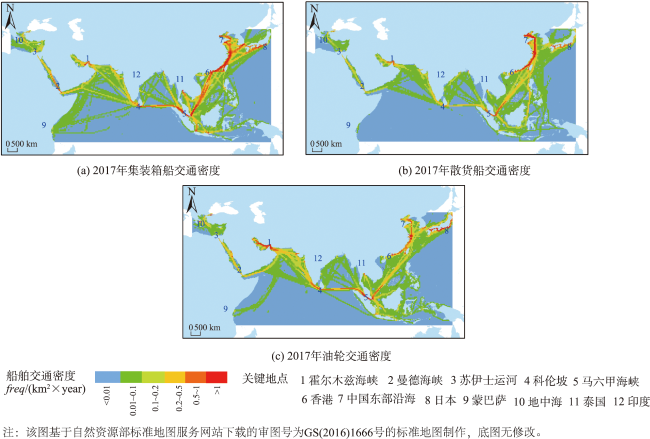
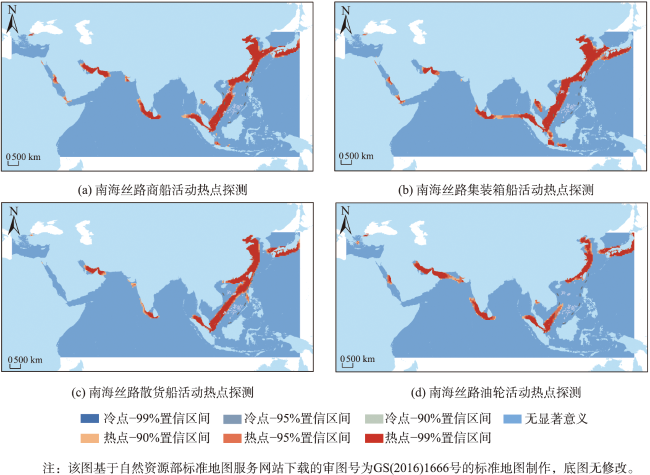
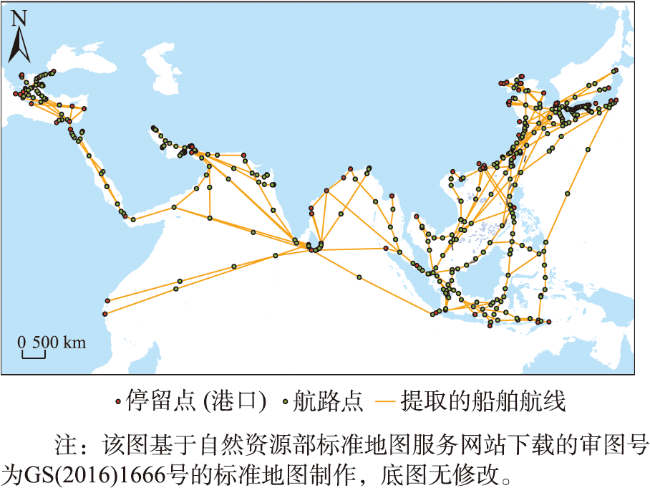
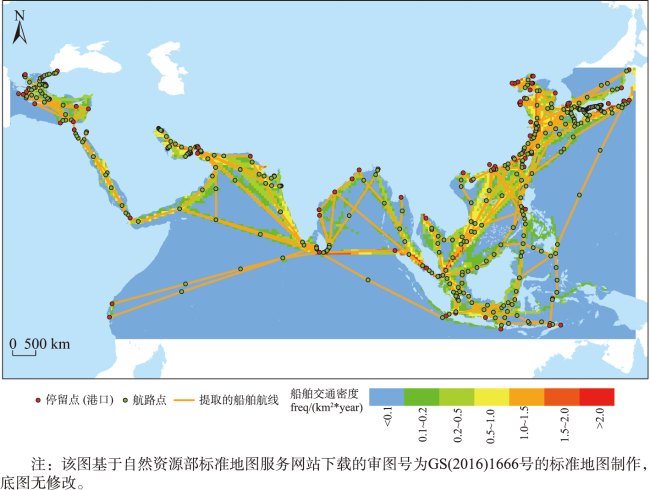
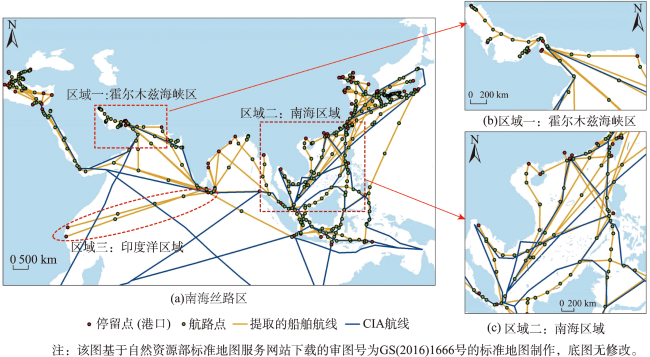
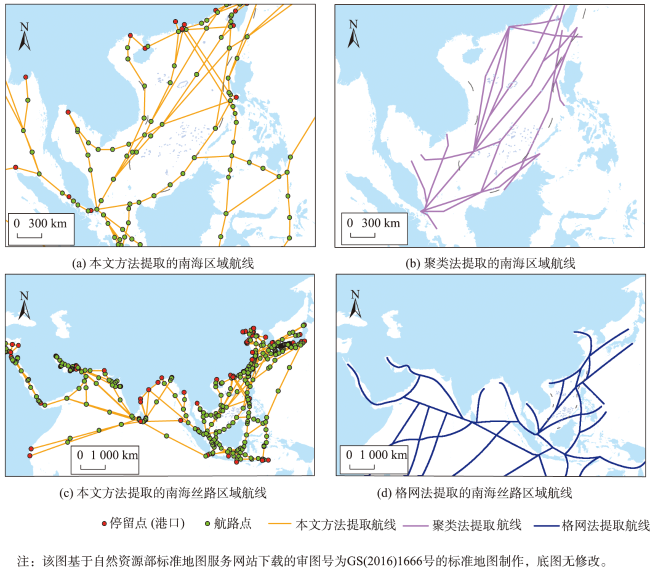
Extraction of ship routes and analysis of traffic flow are the basis of route design, maritime management, and trade analysis. Based on the massive ship trajectory data, existing ship route extraction methods still have limitations in terms of adaptability to large sea areas, model complexity, and consistency with real maritime traffic routes. In this study, we propose a ship trajectory extraction model and traffic flow analysis based on massive ship Automatic Identification System (AIS) data. Firstly, the ship's navigation trajectory is abstracted as the combination of a ship's stay points (stop points) and movement points (waypoints). Stop points represent the characteristic of a ship's stop trajectory at the port, and the waypoint represents the ship's moving trajectory characteristic, e.g., the sailing speed or sailing angle changes significantly. The navigation trajectory abstraction model denoted as "departure port (stop point)→movement (waypoint)→destination port (stop point)" of a ship is constructed, enabling the division of ship navigation trajectory. Secondly, based on the abstract model of ship navigation trajectory, further clustering of stop points and waypoints of the massive ship navigation trajectory based on graph theory is implemented to extract route points (stop points and waypoints) of ships. Finally, a route point connection matrix is established to realize ship route extraction in the form of ship traffic map, which provides a new method for ship route extraction and traffic flow analysis. Taking the Silk Road area in the South China Sea as the study area, the historical AIS data for the entire year of 2017 are used to analyze the traffic flow characteristics and ship routes of typical merchant ships (i.e., container ships, bulk carriers, and oil tankers). The results show that the extracted ship routes are highly consistent with the maritime traffic in high-density areas and can reflect the real maritime traffic routes. Compared with the existing shipping route data, the details of extracted routes are enriched, and the structure is more comprehensive. In addition, compared with the existing shipping route extraction methods, the proposed method has two following advantages. First, the shipping routes extracted by the proposed method have greater richness. The proposed method not only extracts the shipping routes but also identifies the characteristic points during ship navigation, i.e., the stopping points and the waypoints of the ship route, which provides important knowledge support for route design and navigation safety. Second, the extracted routes can be easily applied to analyze the maritime traffic network. Since the extracted routes are in the form of point-to-point starting from the port, it is easy to construct a maritime traffic network, allowing for potential transportation network analysis. This study contributes decision-making support for ship route planning, traffic flow analysis, navigation safety, etc.
YAN Zhaojin , YANG Hui , CI Hui , WANG Ran . Ship Route Extraction Methods and Traffic Flow Analysis[J]. Journal of Geo-information Science, 2023 , 25(11) : 2134 -2149 . DOI: 10.12082/dqxxkx.2023.230059
| [1] |
梅强, 吴琳, 彭澎, 等. 南海区域商船典型空间分布及贸易流向研究[J]. 地球信息科学学报, 2018, 20(5):632-639.
|
| [2] |
|
| [3] |
闫兆进, 杨慧. 基于多源数据和船舶停留轨迹语义建模的港口目标识别[J]. 地球信息科学学报, 2022, 24(9):1662-1675.
|
| [4] |
|
| [5] |
王加胜, 刘永学, 杨昆, 等. 基于空间聚类分析的南海主要航线提取方法[J]. 交通运输工程学报, 2016, 16(6):91-98.
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
陈金海, 陆锋, 彭国均, 等. 船舶轨迹数据的Geodatabase管理方法[J]. 地球信息科学学报, 2012, 14(6):728-735.
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
柳林, 陈德宝, 徐冲, 等. 入室盗窃临近重复案件与孤立案件分布的影响因素对比研究[J]. 地理科学, 2021, 41(9):1625-1633.
|
| [15] |
张远强, 史国友, 李松. 基于在线有向无环图的船舶轨迹压缩算法[J]. 交通运输工程学报, 2020, 20(4):227-236.
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
万刚, 曹雪峰. 地理空间信息网格的历史演变与思考[J]. 测绘学报, 2016, 45(S1):15-22.
|
| [21] |
|
| [22] |
吴迪, 王诺, 于安琪, 等. “丝路”海运网络的脆弱性及风险控制研究[J]. 地理学报, 2018, 73(6):1133-1148.
|
| [23] |
王成, 王茂军, 王艺. 中国嵌入“21世纪海上丝绸之路”航运网络的关键节点识别[J]. 地理科学进展, 2018, 37(11):1485-1498.
|
| [24] |
刘卫东. “一带一路”战略的科学内涵与科学问题[J]. 地理科学进展, 2015, 34(5):538-544.
|
| [25] |
CIA, Map of the world oceans[OL], January 2015. < https://legacy.lib.utexas.edu/maps/world_maps/world_oceans_2015.pdf>(accessed March 2018).2015.
|
| [26] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}