
Journal of Geo-information Science >
Feature Analysis and Development Prospect of High Definition Maps for Autonomous Driving
Received date: 2024-01-01
Revised date: 2024-01-12
Online published: 2024-03-26
Supported by
National Natural Science Foundation of China(42071448)
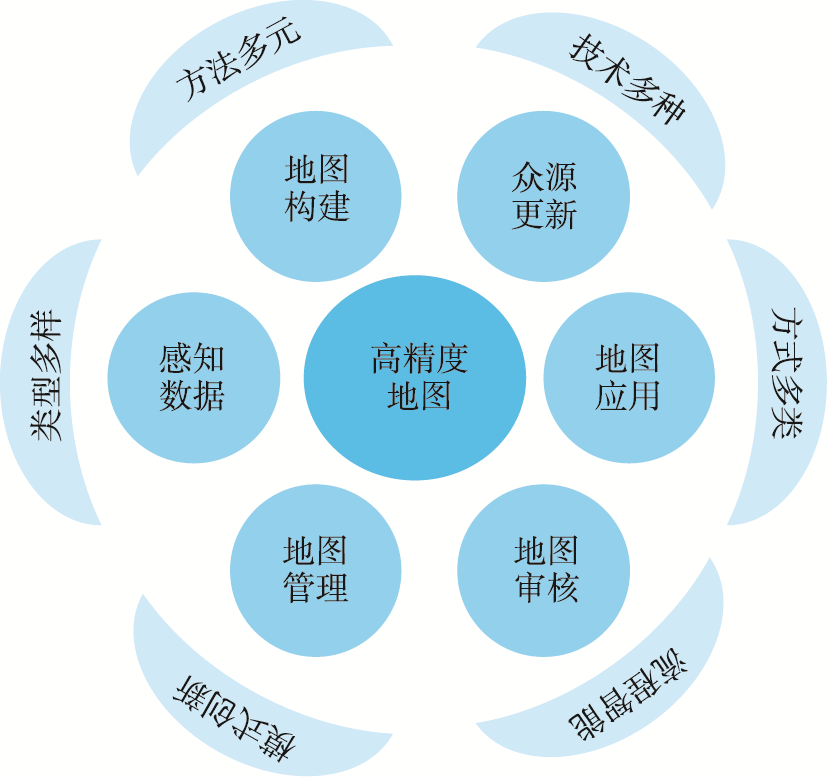
The advent of intelligent connected vehicles has seamlessly integrated into the fabric of contemporary intelligent transportation systems, emerging as an indispensable and transformative constituent. At the nucleus of this paradigm shift lies the autonomous driving high definition maps, assuming a pivotal role in propelling the evolution of intelligent transportation. The high definition maps, as a core element in intelligent connected vehicles, stand as a linchpin in advancing the development of intelligent transportation systems. Effectively establishing intricate connections among drivers, vehicles, road environments, driving conditions, significant landmarks, and the broader social environment, high definition maps act as a catalyst, propelling autonomous driving technology from Level 0 to Level 5. This article delves into the urgent imperatives steering the progression of intelligent connected vehicles and the critical role played by autonomous driving high definition maps. Beginning with an exploration of the essence, mainstream foundational data models, concepts, and characteristics of high definition maps, the discussion underscores their transformative role as a groundbreaking map data paradigm, crucial for realizing autonomous driving in intelligent connected vehicles. Subsequently, a nuanced analysis unfolds, dissecting the multifaceted characteristics woven into the entire lifecycle of high definition maps. This comprehensive examination spans diverse perceptual data types, encompassing multiple map construction methodologies, a variety of crowd-sourced updating techniques, various map application methods, the inherent intelligence embedded in map auditing processes, and innovative management modalities. Additionally, a prototypical route for high definition maps crowd-sourced updating technology is proposed, elucidating the dynamic landscape of map data refinement. Addressing the current challenges in high definition maps auditing, the study introduces an online intelligent map auditing methodology, providing a promising avenue to navigate the intricacies of the auditing process. This approach not only addresses key issues but also ensures the precision and reliability of map data. The practical application of these conceptual frameworks is exemplified through an extensive case study of the Shenzhen high definition maps pilot, offering valuable insights derived from practical experiences and explorations. In conclusion, this paper provides a forward-looking perspective on the developmental trajectory of high definition maps. It envisions their sustained significance and potential advancements, anticipating the continuous refinement and innovation in high definition maps. This ongoing evolution is expected to significantly contribute to the further enhancement of intelligent transportation systems and the maturation of autonomous driving technologies. The transformative impact of high definition maps is poised to usher in a new era of seamless and intelligent mobility, reshaping the landscape of contemporary transportation systems.
DU Qingyun , KUANG Lulu , REN Fu , LIU Jiangtao , FENG Chang , CHEN Zhuoning , ZHANG Bocong , ZHENG Kang , LI Zhicheng . Feature Analysis and Development Prospect of High Definition Maps for Autonomous Driving[J]. Journal of Geo-information Science, 2024 , 26(1) : 15 -24 . DOI: 10.12082/dqxxkx.2024.240054
表1 高精度地图数据集使用的传感器和特点Tab. 1 Sensors used and features in high definition maps datasets |
| 数据集 | 主要传感器 | 特点 |
|---|---|---|
| KITTI | 灰度/彩色相机、激光雷达、GPS、IMU | 包含市区、乡村和高速公路等场景 |
| Cityscape | 双目相机 | 包含50个城市,春、秋、夏3个季节的街区场景 |
| Mapillary Vistas | 彩色相机 | 覆盖北美和南美,欧洲,非洲,亚洲和大洋洲 |
| Waymo Open | 彩色相机、激光雷达 | 覆盖25个城市,包含城市、郊区、白天/黑夜、黎明/黄昏、晴天和雨天 |
| nuScenes | 彩色相机、激光雷达、毫米波雷达、GPS、IMU | 覆盖城市、住宅区、郊区、工业区等场景,涵盖白天、黑夜、晴天、雨天、多云等天气 |
| ApolloScape | 激光扫描器、摄像头、IMU/GNSS | 使用专业采集车,激光雷达点云密度高,相机方位姿态准确度高 |
| Argoverse | 彩色相机、双目相机、激光雷达 | 包含290 km的带有几何形状和语义信息的高精度地图数据 |
| CADC | 彩色相机、激光雷达 | 全球首个针对寒冷环境的数据集 |
| CULane | 彩色相机 | 覆盖10个城市的公路、城市和乡村场景 |
表2 高精度地图模块化和端到端应用方式的差异Tab. 2 Differences between modular and end-to-end application approachesto high definition maps |
| 应用方式 | 感知 | 定位 | 预测 | 规划、决策 | 控制 |
|---|---|---|---|---|---|
| 模块化应用 | 丰富先验信息 | 厘米级精度 | 动态信息 | 道路网络信息 | 曲率及坡度 |
| 高精度地图 | |||||
| 更全面 | 更精准 | 更安全 | 更合理 | 更平稳 | |
| 端到端应用 | 地图+传感器 | 地图+传感器 | 传感器 | 地图+传感器 | 传感器 |
| 导航电子地图/高级辅助驾驶地图、动态感知数据 | |||||
| 实时动态、云端仿真测评性能强、在线计算效率高、无需人工标注数据 | |||||
| [1] |
李克强. 智能网联汽车的发展现状与对策建议[J]. 机器人产业, 2020(6):28-35.
[
|
| [2] |
李克强. 中国智能网联汽车产业化过程中的挑战及发展对策[J]. 机器人产业, 2019(6):54-57.
[
|
| [3] |
张攀, 刘经南. 通用化高精地图数据模型[J]. 测绘学报, 2021, 50(11):1432-1446.
[
|
| [4] |
孟立秋. 自主导航地图的昨天、今天和明天[J]. 测绘学报, 2022, 51(6):1029-1039.
[
|
| [5] |
陈龙, 刘坤华, 周宝定, 等. 多智能体协同高精地图构建关键技术研究[J]. 测绘学报, 2021, 50(11):1447-1456.
[
|
| [6] |
刘经南, 詹骄, 郭迟, 等. 智能高精地图数据逻辑结构与关键技术[J]. 测绘学报, 2019, 48(8):939-953.
[
|
| [7] |
徐红. 探寻最优解, 推动智能汽车基础地图安全应用——访自然资源部地理信息管理司副司长吴剑锋[J]. 中国测绘, 2022(6):12-15.
[
|
| [8] |
刘经南, 吴杭彬, 郭迟, 等. 高精度道路导航地图的进展与思考[J]. 中国工程科学, 2018, 20(2):99-105.
[
|
| [9] |
|
| [10] |
应申, 蒋跃文, 顾江岩, 等. 面向自动驾驶的高精地图模型及关键技术[J/OL]. 武汉大学学报(信息科学版):1-12[2023-08-15].
[
|
| [11] |
尹彤, 黄鹤, 郭迟, 等. 面向自动驾驶的高精地图生产技术及数据模型标准化探讨[J]. 中国标准化, 2021(4):33-37.
[
|
| [12] |
李必军, 郭圆, 周剑, 等. 智能驾驶高精地图发展与展望[J/OL]. 武汉大学学报(信息科学版):1-18[2023-08-07].
[
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
齐如煜, 尹章才, 顾江岩, 等. 高精地图的知识图谱表达[J/OL]. 武汉大学学报(信息科学版):1-14. [2023-10-19].
[
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
蒋秉川, 万刚, 许剑, 等. 多源异构数据的大规模地理知识图谱构建[J]. 测绘学报, 2018, 47(8):1051-1061.
[
|
| [28] |
杨蒙蒙, 江昆, 温拓朴, 等. 自动驾驶高精度地图众源更新技术现状与挑战[J]. 中国公路学报, 2023, 36(5):244-259.
[
|
| [29] |
李月华. 基于自动驾驶众包地图更新技术方法[J]. 北京测绘, 2022, 36(5):629-635.
[
|
| [30] |
李德仁, 洪勇, 王密, 等. 测绘遥感能为智能驾驶做什么?[J]. 测绘学报, 2021, 50(11):1421-1431.
[
|
| [31] |
陈欣, 向隆刚, 焦凤伟. 基于众源轨迹的OSM路网转向信息增强[J]. 地球信息科学学报, 2023, 25(10):1954-1967.
[
|
| [32] |
冯昶, 杜清运, 范晓宇, 等. 高精动态地图基础平台众源更新技术路线研究[J]. 测绘地理信息, 2023, 48(1):10-15.
[
|
| [33] |
李升波, 刘畅, 殷玉明, 等. 汽车端到端自动驾驶系统的关键技术与发展趋势[J]. 人工智能, 2023(5):1-16.
[
|
| [34] |
陈会仙, 章炜, 杨蒙蒙, 等. 面向无人驾驶的高精地图公开应用趋势研究[J/OL]. 武汉大学学报(信息科学版):1-16[2024-01-16].
[
|
| [35] |
段续庭, 周宇康, 田大新, 等. 深度学习在自动驾驶领域应用综述[J]. 无人系统技术, 2021, 4(6):1-27.
[
|
| [36] |
刘经南, 董杨, 詹骄, 等. 自动驾驶地图有关政策的思考和建议[J]. 中国工程科学, 2019, 21(3):92-97.
[
|
| [37] |
刘万增, 陈军, 任加新, 等. 基于混合智能的地图自动审核技术框架[J]. 武汉大学学报(信息科学版), 2022, 47(12):2038-2046.
[
|
| [38] |
自然资源部. 智能汽车基础地图标准体系建设指南(2023版)[EB/OL].(2023-03-03)[2023-07-09]. http://gi.mnr.gov.cn/202303/t20230306_2777534.html
|
| [39] |
深圳市人民代表大会常务委员会. 深圳经济特区智能网联汽车管理条例[EB/OL]. (2022-07-18)[2023-06-02].http://www.sz.gov.cn/zfgb/2022/gb1250/content/post_9967816.html
|
/
| 〈 |
|
〉 |







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}