
Journal of Geo-information Science >
Points-of-Interest Tag Cloud Centered on the User's Geographic Location
Received date: 2023-02-15
Revised date: 2023-07-24
Online published: 2024-03-26
Supported by
Open Fund of Key Laboratory of Urban Land Resources Monitoring and Simulation, Ministry of Natural Resources(KF-2021-06-109)
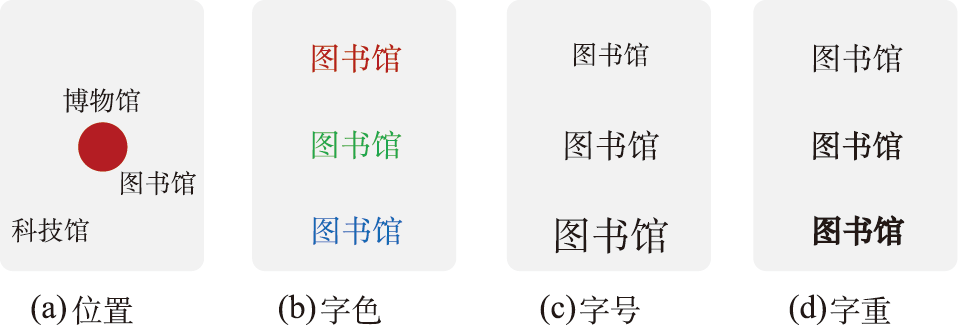
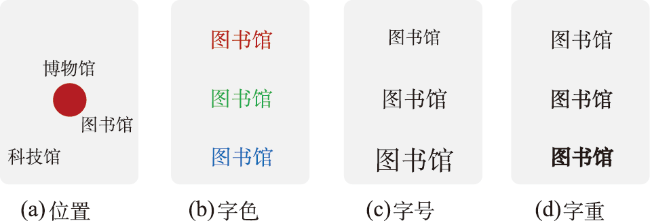
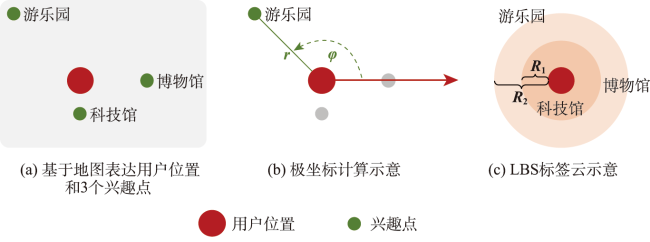
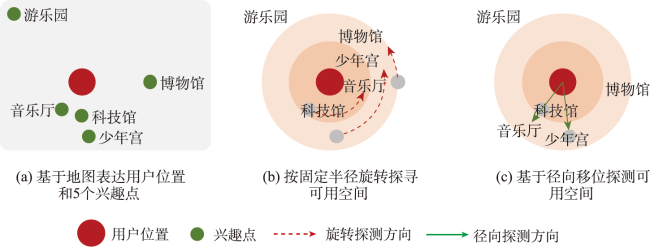
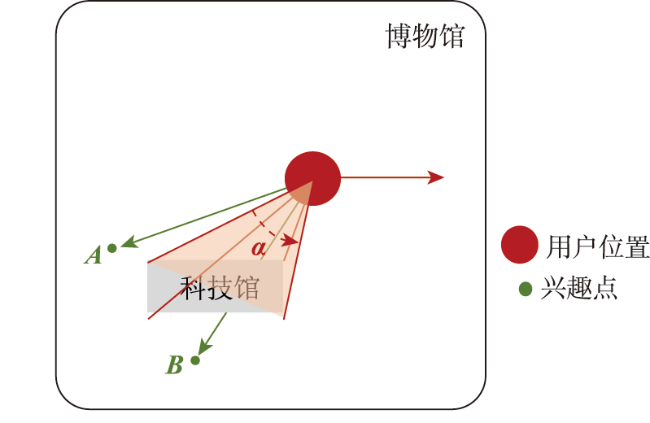
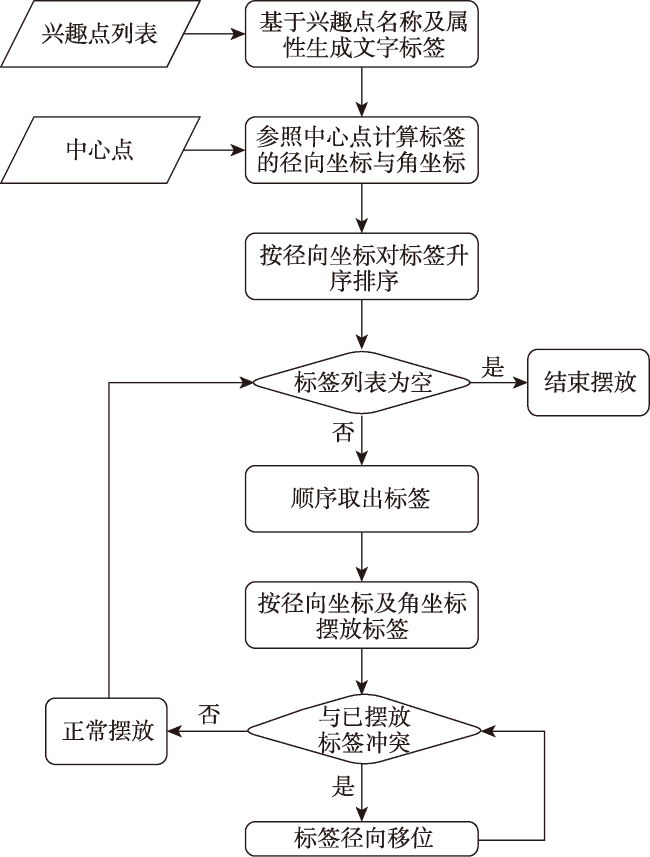
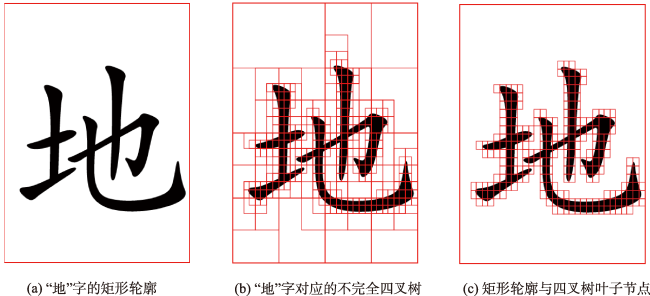
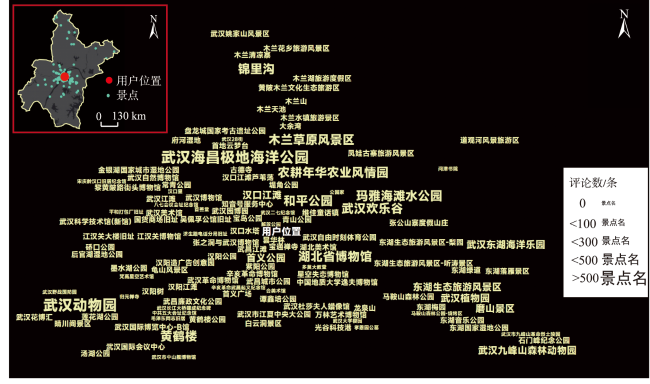
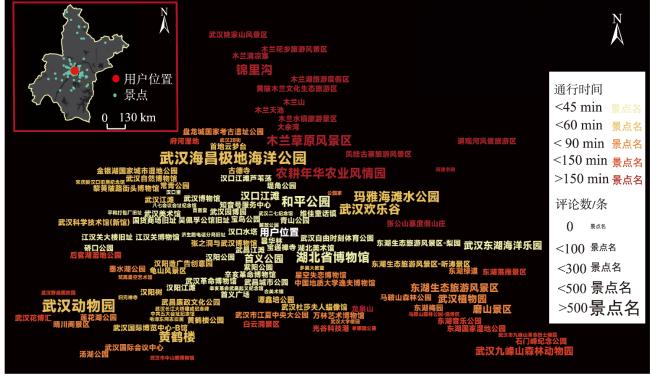
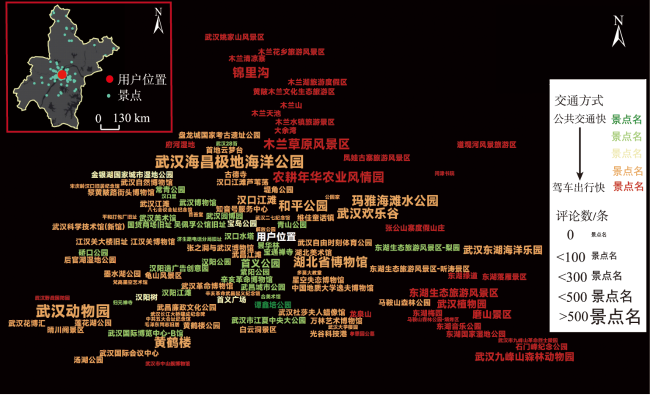
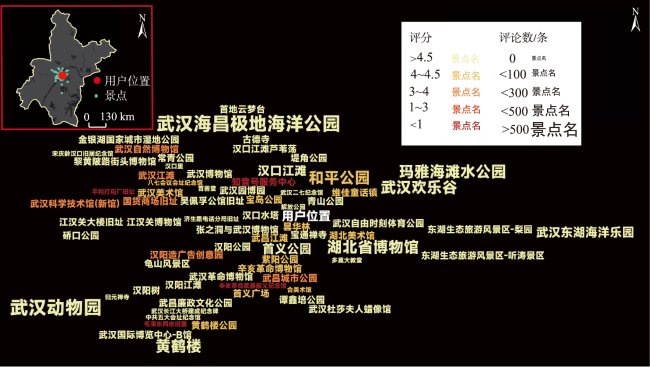
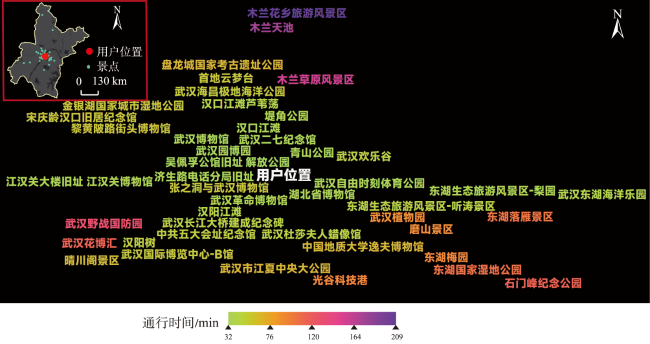
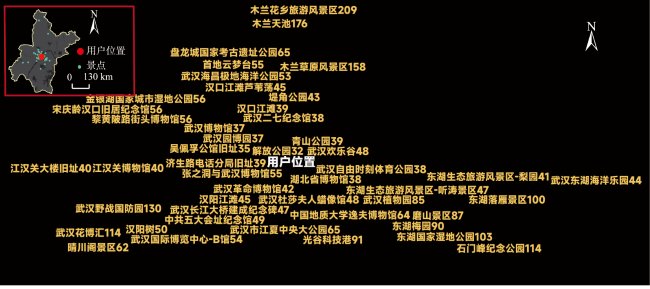
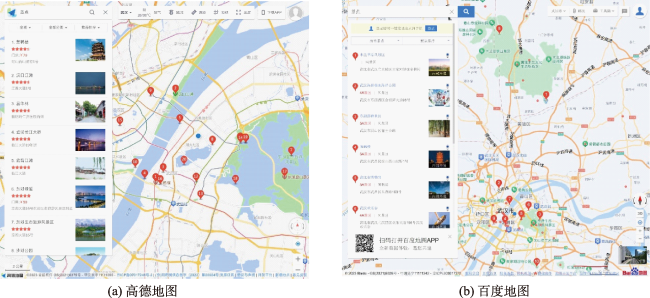
Taking Location-Based Services (LBS) as the study context, to address the limitation of visualizing Points of Interest (POI) on conventional maps, a novel tag cloud called “LBS tag cloud” is proposed, and a corresponding generation method based on tag radial displacement is designed in this study. The main innovation of the LBS tag cloud is the incorporation of a layout center into the regular tag cloud and determination of the placement of the tags according to the spatial relationship between the tags and the center. The generation method designed in this paper is outlined as follows: first, the geographical location of the LBS user is used as the layout center; then, the text tag is generated based on the name of the POI, and visual variables such as font size and color of the tag are determined according to the attributes of the POI; and finally, the initial placement position of the tag is calculated according to the relationship between the tag and the center, and the tag is then displaced radially from the initial placement position to a position where there is no overlap with other tags. During the displacement, the order of near and far is ensured based on the angular adjacent relationship. The tag collision detection efficiency is improved by using a quadtree to approximate the glyph outline. Taking the POI of scenic spots as an example, we discuss the usability and scalability of the LBS tag cloud in three scenarios. The results show that compared with conventional maps, the LBS tag cloud can display more POI and effectively highlight the information that users care about, such as the popularity, rating, and travel time of POI. Although the LBS tag cloud contains a certain distance deformation, the synergy of multiple visual variables effectively alleviates the cognitive error caused by the distance deformation. In summary, the LBS tag cloud can completely and intuitively represent the spatial distribution, multi-dimensional attributes of POI, and their relationship with the user's location. It is a new visualization form suitable for users to recognize the surrounding environment efficiently.
CHENG Xiaoqiang , LIU Zhongyu , WU Huayi , TANG Lingjun . Points-of-Interest Tag Cloud Centered on the User's Geographic Location[J]. Journal of Geo-information Science, 2024 , 26(1) : 85 -98 . DOI: 10.12082/dqxxkx.2024.230069
表1 LBS标签云与已有方法的对比Tab. 1 LBS tag cloud versus existing methods |
| 编号 | 可视化能力 | LBS标签云 | Web地图 | Zoomless Map | Focus+ Context |
|---|---|---|---|---|---|
| 1 | 完整显示所有兴趣点的名称 | 可以 | 无法显示 | 无法显示 | 无法显示 |
| 2 | 直观表达兴趣点的多维属性 | 可以 | 列表展示 | 可以 | 无法表达 |
| 3 | 根据需求灵活组合视觉变量 | 可以 | 可以 | 无法组合 | 无法组合 |
| 4 | 精确表达兴趣点的地理位置 | 无法表达 | 可以 | 可以 | 无法表达 |
| 5 | 直观表达与用户位置的关系 | 可以 | 列表展示 | 无法表达 | 无法表达 |
| 6 | 基础要素提供的地理参考 | 无 | 有 | 有 | 有 |
| 7 | 可清晰表达的兴趣点数量 | 约100个 | 约20个 | 不详 | 不详 |
| 8 | 兼顾宏观分布与局部细节 | 可以 | 无法兼顾 | 无法兼顾 | 可以 |
| 9 | 基础要素干扰 | 无 | 有 | 有 | 有 |
| 10 | 支持的用户交互 | 简单交互 | 丰富的用户交互 | 丰富的用户交互 | 简单交互 |
| [1] |
周傲英, 杨彬, 金澈清, 等. 基于位置的服务:架构与进展[J]. 计算机学报, 2011, 34(7):1155-1171.
[
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
禹文豪, 艾廷华, 刘鹏程, 等. 设施POI分布热点分析的网络核密度估计方法[J]. 测绘学报, 2015, 44(12):1378-1383,1400.
[
|
| [9] |
何亚坤, 艾廷华, 禹文豪. 等时线模型支持下的路网可达性分析[J]. 测绘学报, 2014, 43(11):1190-1196.
[
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
杨敏, 艾廷华, 卢威, 等. 自发地理信息兴趣点数据在线综合与多尺度可视化方法[J]. 测绘学报, 2015, 44(2):228-234.
[
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
杨乃, 吴国佳, 杨春成. 文本地图可视化综述[J]. 测绘地理信息, 2021, 46(1):48-52.
[
|
| [26] |
华一新, 李响, 赵军喜, 等. 一种基于标签云的位置关联文本信息可视化方法[J]. 武汉大学学报·信息科学版, 2015, 40(8):1080-1087.
[
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
杨乃, 庞旭静, 奚大平, 等. 用于内置式标签地图权重表达的等差字大策略评估[J]. 武汉大学学报·信息科学版, 2022, 47(12):2134-2142.
[
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
王丽娜, 李响, 江南, 等. 中心型时间地图的构建方法与实现[J]. 测绘学报, 2018, 47(1):123-132.
[
|
| [39] |
魏智威, 刘远刚, 许文嘉, 等. 利用Snake移位模型构建中心型地图[J]. 武汉大学学报·信息科学版, 2022, 47(12):2105-2112,2122.
[
|
| [40] |
王圣音, 高勇, 陆锋, 等. 场所模型及大数据支持下的场所感知[J]. 武汉大学学报·信息科学版, 2020, 45(12):1930-1941.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}