
Journal of Geo-information Science >
Integration of Mixed Pooling and Label Information Optimization for Oilfield Land Cover Extraction Model
Received date: 2023-08-22
Revised date: 2023-10-25
Online published: 2024-03-31
Supported by
Sinopec Shengli Oilfield Branch Research Project(YKJ2210)
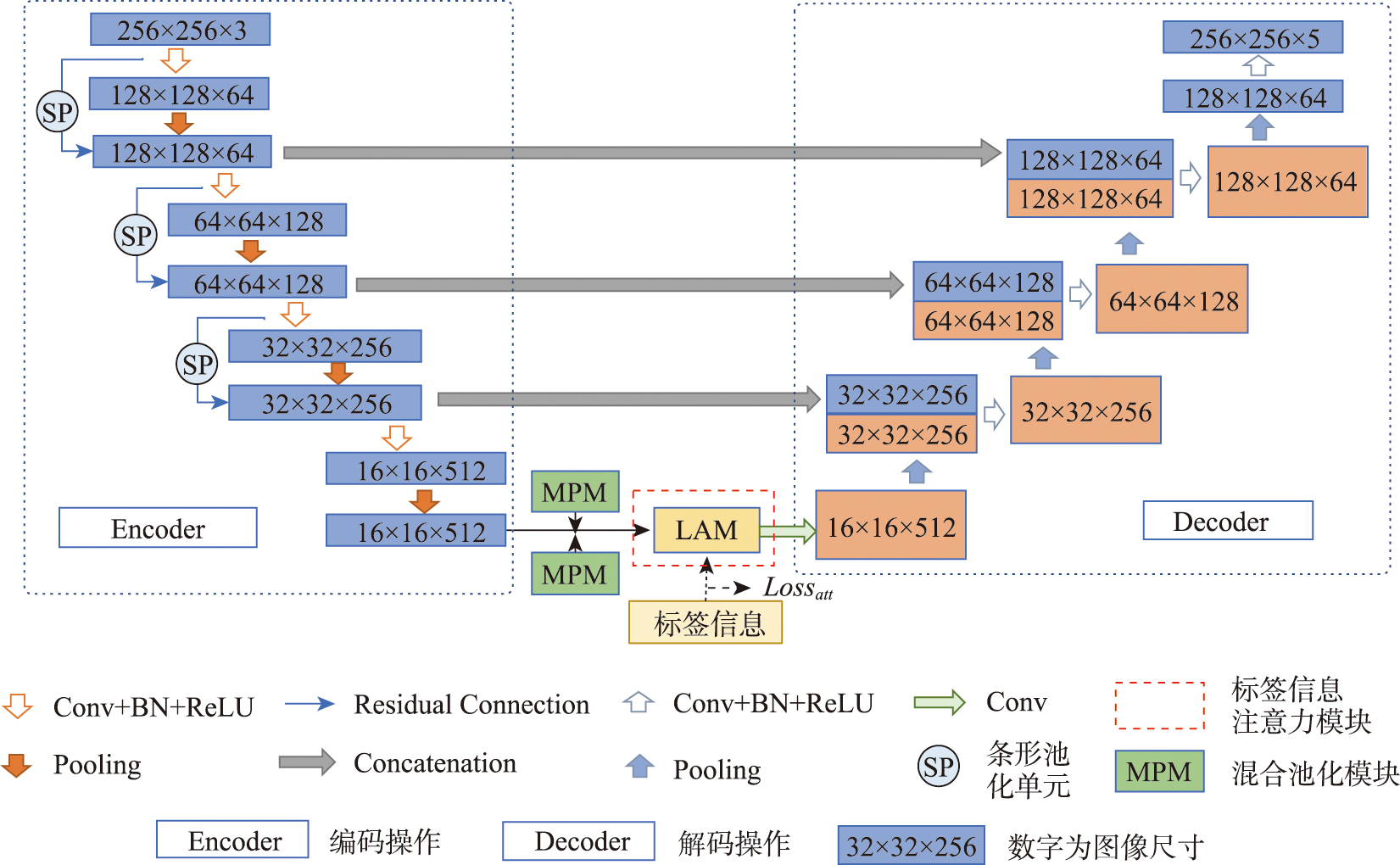
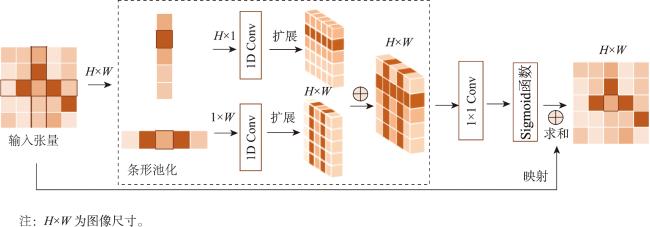
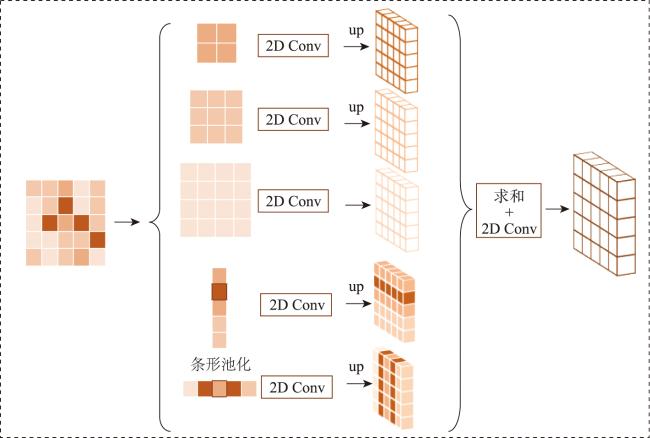
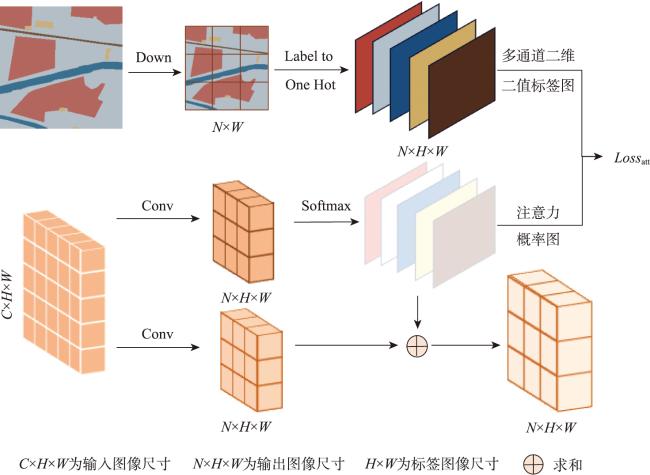
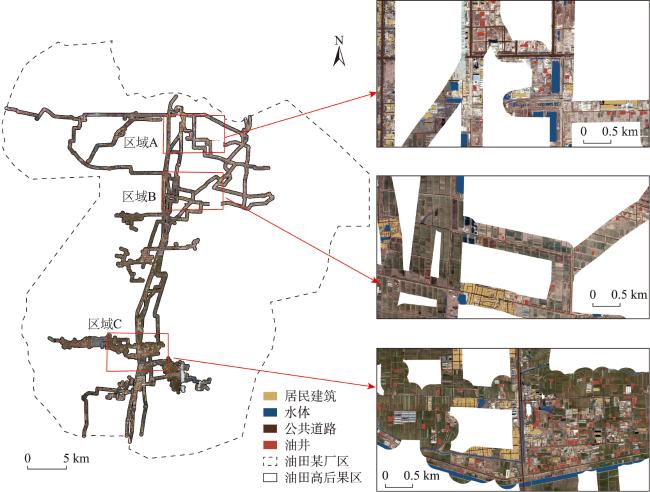
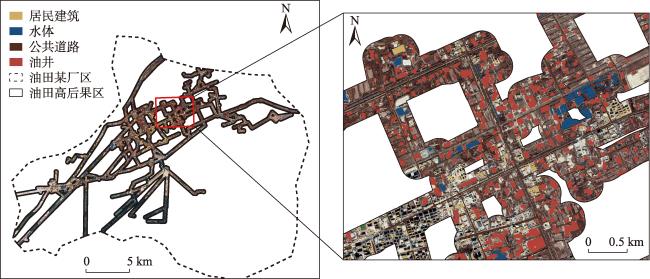
High consequence areas within oilfields are critical zones for the safety management of petroleum transport pipelines. Accurately and efficiently capturing the spatial distribution of key features in high-consequence areas of oilfields is essential for the smooth operation of petroleum safety production and the scientific management of oilfield regions. However, there are still challenges in extraction tasks of the high-consequence areas of oilfields, such as diverse ground object shapes, small spectral differences, and complex types, and the extraction results often include misclassification, omissions, and road discontinuities. To address these challenges, we propose an SML_ResUnet model for land cover extraction in high-consequence areas of oil fields based on ResUnet architecture. This model integrates Strip Pooling (SP) units in the pooling stages and incorporates Mixed Pooling Modules (MPM) and Label Attention Modules (LAM) between the encoding and decoding processes. The SP units are designed to capture elongated and isolated features, excluding information from other irrelevant areas, while the MPM combines the advantages of standard pooling and strip pooling, effectively preserving feature information across different spatial positions. The label attention module introduces label information to optimize the attention probability maps generated within the attention module, further enhancing the extraction results. We applied the proposed model on a high-resolution dataset of a high-consequence area of an oilfield. The results of the ablation experiments indicated that the proposed SML_ResUnet network achieved the optimal extraction results. The metrics of Overall Accuracy (OA), Mean Intersection over Union (MIoU), and F1-score reached 97.24%, 84.23%, and 91.26%, respectively. Compared to the classical ResUnet model, improvements are observed in all evaluation metrics of the proposed model, with OA, MIoU, and F1-score increasing by 0.48%, 2.49%, and 1.55%, respectively. For a land cover extraction task within a high consequence area of an oilfield in Shandong Province, the OA of the extraction results averaged at 97.66%. We then extended the model in other high-consequence areas of oilfields in Shandong Province and achieved an Overall Accuracy (OA) of 95.63%. Our results meet the accuracy requirements for rapid acquisition of surface information in large-scale high-consequence areas of oilfields and demonstrate that the SML_ResUnet model is particularly suitable for large-scale land cover extraction tasks within oilfields characterized by diverse and complex terrain types.
GAO Chen , CHEN Yunzhi , DONG Yan , LIU Lei , Guo Jun . Integration of Mixed Pooling and Label Information Optimization for Oilfield Land Cover Extraction Model[J]. Journal of Geo-information Science, 2024 , 26(3) : 753 -763 . DOI: 10.12082/dqxxkx.2024.230491
表1 基底模型选取实验的精度对比Tab. 1 Accuracy comparison of baseline model selection experiments (%) |
| 模型 | OA | MIou | Recall | Precision | F1-Score |
|---|---|---|---|---|---|
| Unet | 95.70 | 76.36 | 83.69 | 88.92 | 86.16 |
| DeepLabv3_plus | 96.18 | 78.86 | 86.30 | 89.45 | 87.81 |
| ResUnet | 96.72 | 81.74 | 88.37 | 91.14 | 89.71 |
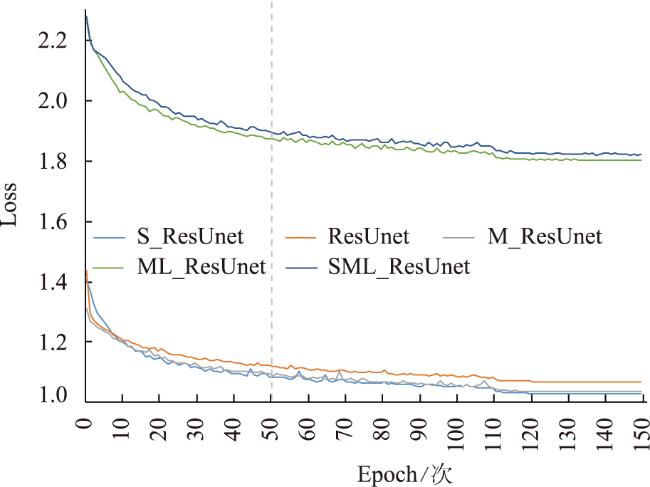
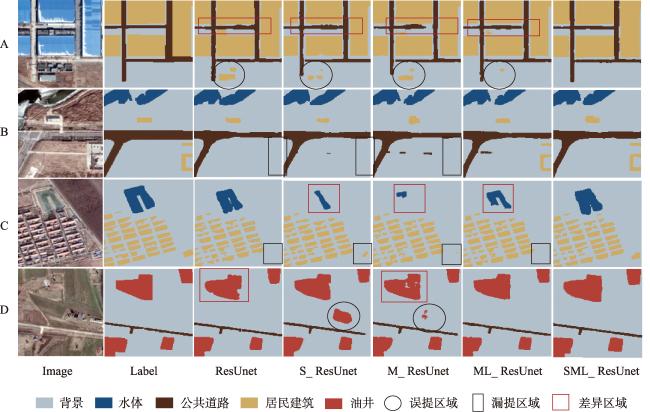
表2 各模块在基底模型为ResUnet精度对比Tab. 2 Accuracy comparison of different modules on baseline model ResUnet (%) |
| 模型 | OA | MIou | Recall | Precision | F1-Score |
|---|---|---|---|---|---|
| ResUnet | 96.72 | 81.74 | 88.37 | 91.14 | 89.71 |
| S_ResUnet | 96.18 | 76.08 | 88.55 | 84.80 | 87.81 |
| M_ResUnet | 96.74 | 81.57 | 87.85 | 91.49 | 89.59 |
| ML_ResUnet | 97.19 | 84.06 | 89.98 | 92.39 | 91.15 |
| SML_ResUnet | 97.24 | 84.23 | 90.16 | 92.43 | 91.26 |
注:表中加粗数值表示最高精度。 |
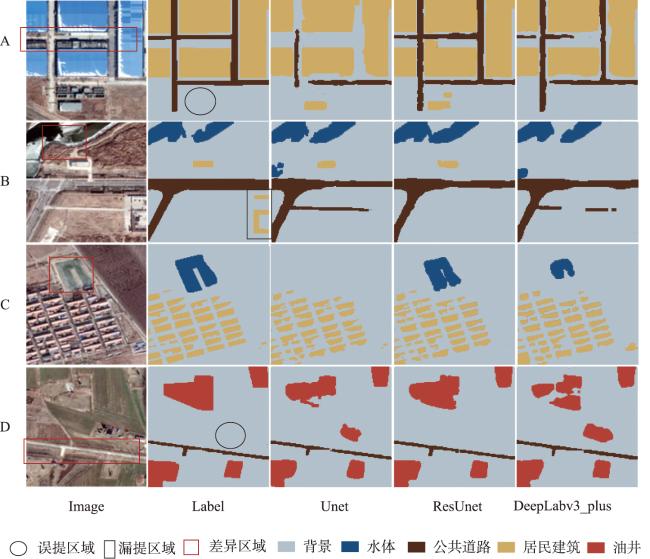
表3 各类地物的提取结果精度对比Tab. 3 Accuracy comparison of land cover extraction results for different categories (%) |
| 模型 | 各地物F1-Score | 平均 F1-Score | |||
|---|---|---|---|---|---|
| 居民建筑 | 水体 | 公共道路 | 油井 | ||
| ResUnet | 85.69 | 93.05 | 84.53 | 87.16 | 89.71 |
| S_ResUnet | 83.70 | 92.38 | 81.07 | 84.13 | 87.81 |
| M_ResUnet | 86.21 | 93.32 | 84.13 | 86.17 | 89.59 |
| ML_ResUnet | 87.43 | 94.45 | 87.01 | 88.44 | 91.15 |
| SML_ResUnet | 88.20 | 94.12 | 87.60 | 87.99 | 91.26 |
注:表中加粗数值表示最高精度。 |
表4 不同区域的精度指标Tab. 4 Accuracy metrics for different regions (%) |
| 区域 | OA | MIou | Recall | Precision | F1-Score |
|---|---|---|---|---|---|
| A | 96.91 | 86.27 | 94.92 | 90.18 | 92.46 |
| B | 98.15 | 85.49 | 94.50 | 89.73 | 91.92 |
| C | 97.93 | 88.05 | 97.59 | 89.88 | 93.44 |
| [1] |
孙龙德, 陈艳鹏, 葛稚新, 等. 论中国油气行业上游绿色低碳转型与创新[J]. 国际石油经济, 2022, 30(10):1-9.
[
|
| [2] |
|
| [3] |
蔡祥, 李琦, 罗言, 等. 面向对象结合深度学习方法的矿区地物提取[J]. 国土资源遥感, 2021, 33(1):63-71.
[
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
徐佳伟, 刘伟, 单浩宇, 等. 基于PRCUnet的高分遥感影像建筑物提取[J]. 地球信息科学学报, 2021, 23(10):1838-1849.
[
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
范天航. 基于高分遥感影像数据的油田地区建筑物信息提取方法研究[D]. 长春: 吉林大学, 2016.
[
|
| [23] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}