
Journal of Geo-information Science >
A Spatio-Temporally Associated Vehicle Discovery Method for Group-Crime Based on ANPR Data
Received date: 2024-06-12
Revised date: 2024-09-14
Online published: 2024-11-28
Supported by
National Natural Science Foundation of China(41971367)
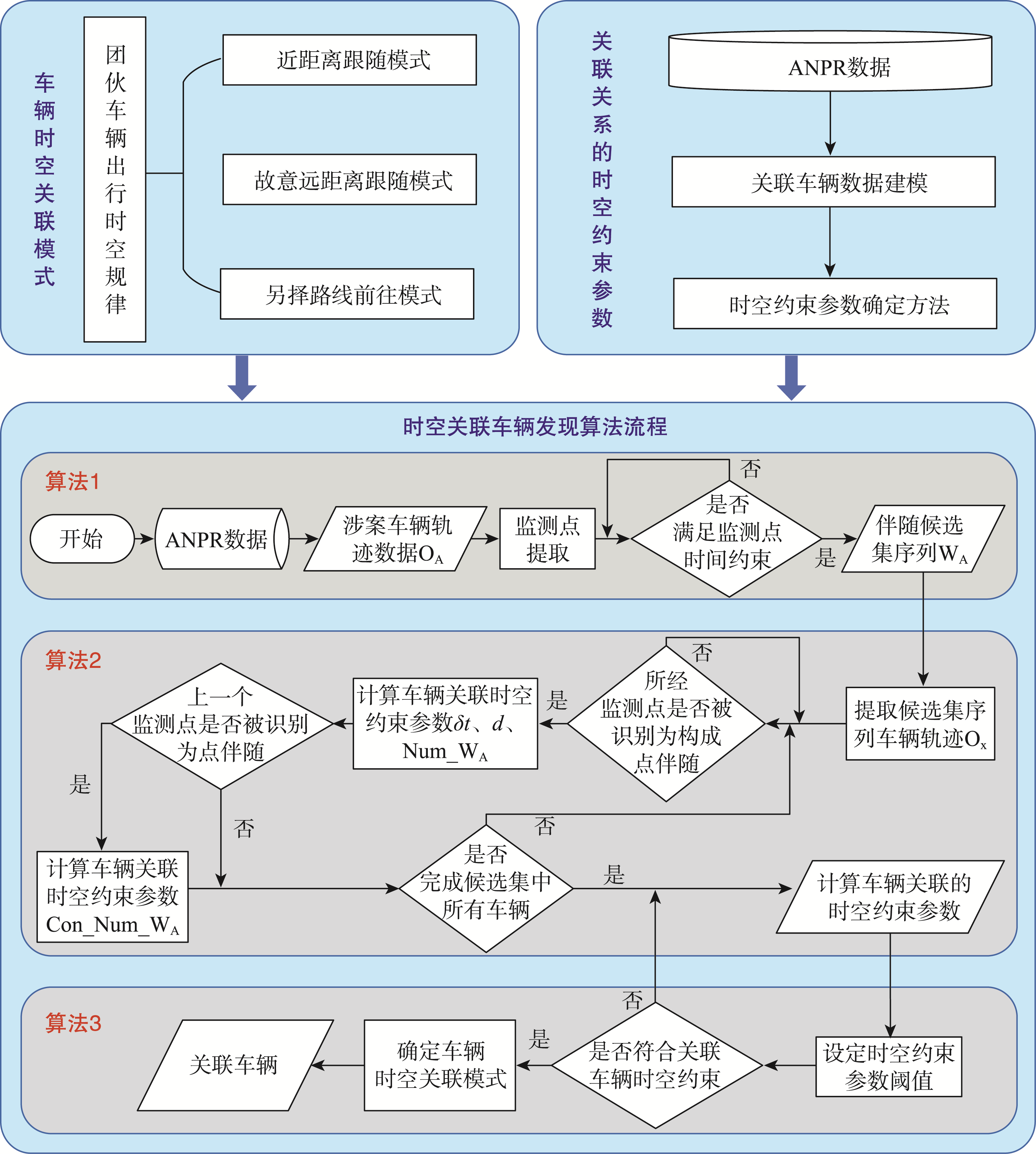
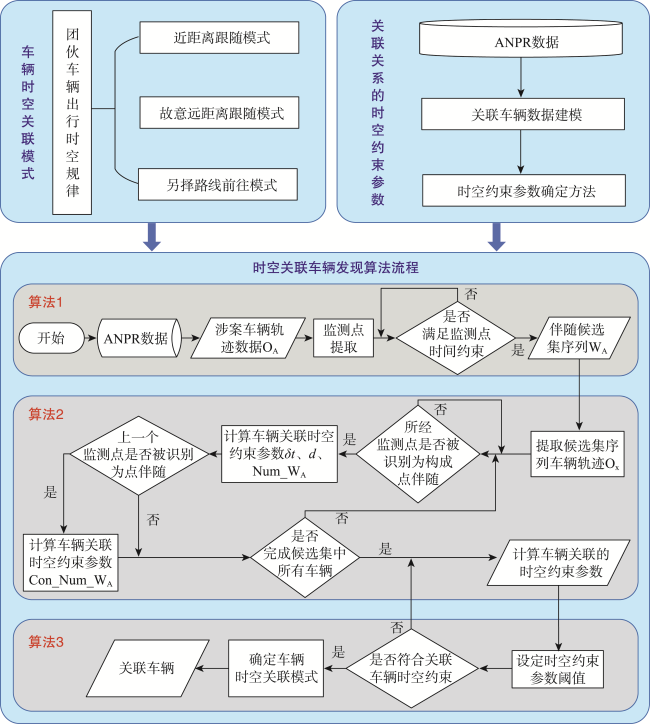
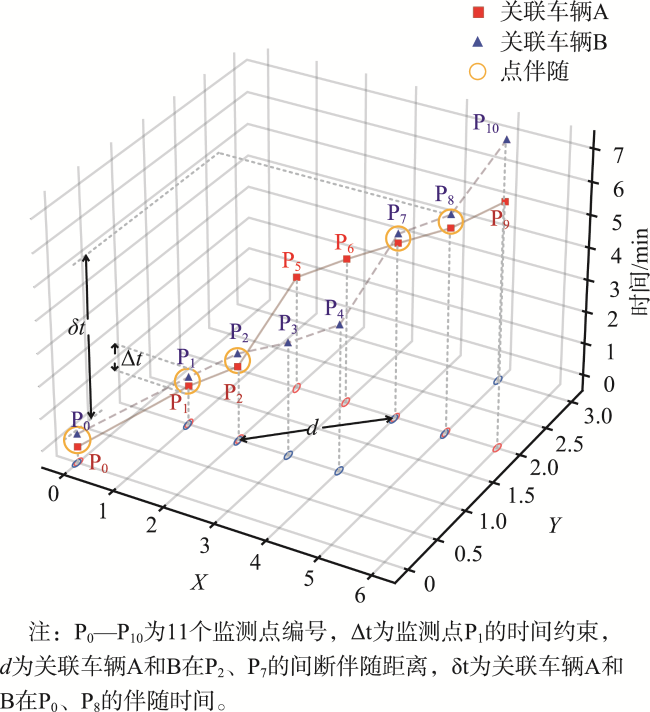
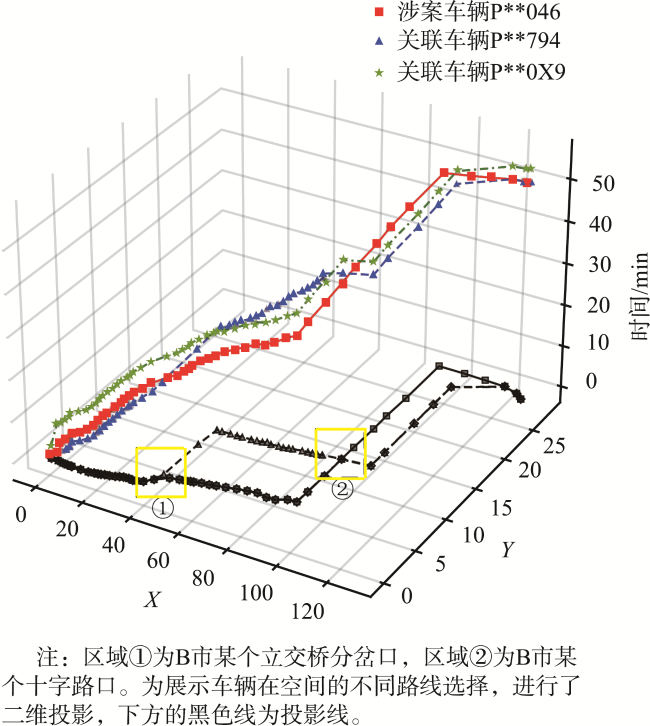
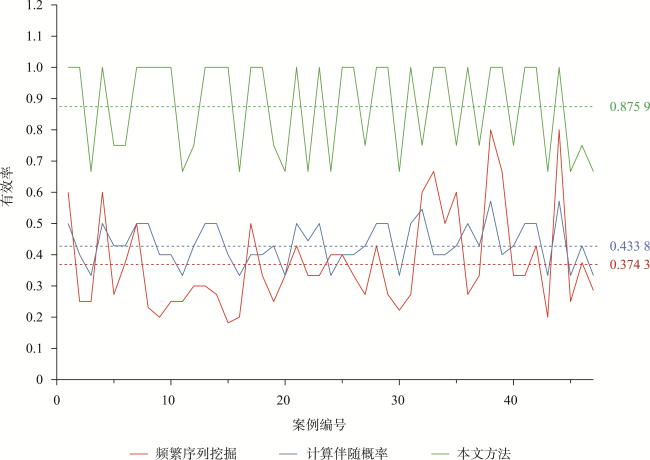
This paper addresses the challenge of discovering spatio-temporally associated vehicles involved in crimes using Automatic Number Plate Recognition (ANPR) data, which is a crucial resource in public security work for obtaining vehicle trajectories. The significance of identifying associated vehicles in the context of group-crime prevention and control is emphasized. Practical experiences reveal that criminal groups often adopt subjective strategies to avoid suspicion, leading to unique spatio-temporal association patterns such as intentional long-distance following, which differ from traditional accompanying relationships and are difficult to detect with existing methods. Oriented to the actual needs of public security work, from the perspective of group-crime, to tackle this issue, the paper first analyzes the travel patterns of criminal group vehicles and categorizes them into three main spatio-temporal association modes: close-following mode, intentional long-distance following mode, and alternative-route mode. These modes reflect the different strategies used by criminals to avoid detection, ranging from maintaining close proximity to the peer vehicle to deliberately choosing different routes. Based on these patterns, the paper develops a data model using ANPR data. The study introduces spatio-temporal constraint parameters to better capture the association relationships between vehicles. These parameters include the monitoring point time constraint (Δti), point accompanying number (Num_Wx), continuous point accompanying number (Con_Num_Wx), intermittent accompanying distance (d), and accompanying duration (δt).The proposed method for discovering spatio-temporally associated vehicles leverages these parameters to identify potential criminal associations. The methodology involves preprocessing ANPR data to obtain vehicle trajectories, extracting candidate accompanying vehicle sets, calculating spatio-temporal constraint parameters for each candidate vehicle, and setting thresholds for these parameters to discover associated vehicles containing different spatio-temporal patterns. Finally, taking city B as an example, the relevant ANPR data of group-crimes vehicles are used for test and analysis, and the spatio-temporal constraint parameter thresholds are quantitatively evaluated based on the historical data of group-crime cases, based on which the spatio-temporal correlation vehicle analysis of a typical case is conducted, and when comparing this paper's method with the two methods of frequent sequence mining and calculating the concomitant probability, the effectiveness of this paper's method can reach up to 87.59% on average, which is better than the the comparison methods. The results show that the method can effectively identify vehicles engaged in long-distance following and alternative-route strategies, which are often missed by traditional methods. As a result, it is able to quickly target those involved in the crime and further narrow the scope of investigation. In conclusion, the paper presents a comprehensive method for discovering spatio-temporally associated vehicles using ANPR data, significantly enhancing the ability to detect vehicles with complex association patterns. This method not only broadens the application scope of spatio-temporal association discovery but also provides new insights and technical support for public security departments in addressing group-crimes.
ZHAO Xingyue , LIN Yan , DING Zhengyan . A Spatio-Temporally Associated Vehicle Discovery Method for Group-Crime Based on ANPR Data[J]. Journal of Geo-information Science, 2024 , 26(12) : 2701 -2711 . DOI: 10.12082/dqxxkx.2024.240338
| 算法1 提取伴随候选集序列 |
|---|
| 输入 涉案车辆轨迹数据OA,监测点时间阈值Δt |
| 输出 涉案车辆轨迹的伴随候选集序列WA。 |
| for i in OA |
| for Pi in OA |
| WAi ={ x | tAi ≤ txi ≤ tAi + Δt} |
| WA add.(WAi) |
| return WA |
| 算法2 计算车辆关联的时空约束参数 |
|---|
| 输入 涉案车辆轨迹的伴随候选集序列WA |
| 输出 车辆关联的时空约束参数 |
| for x in WAi |
| for Oxi in Ox |
| if Pxi ⊂ OA & tAi ≤ txi ≤ tAi + Δt |
| δt = max(txi)-min(txi) |
| d = max|Pxi - Pxj| |
| Num_WA.add(1) if Px(i-1) ⊂ OA Con_Num_WA.add(1) |
| return x, δt, d, Num_WA, Con_Num_WA |
| 算法3 发现关联车辆及其所含时空关联模式 |
|---|
| 输入 伴随最大时间阈值α、间断伴随最大间距阈值β、点伴随 次数阈值ε、持续点伴随最大数量阈值λ |
| 输出 涉案车辆的关联车辆及其所含时空关联模式 |
| Linked Vehicle(α, β, γ, λ) for x in algorithm2.output |
| if Num_WA > ε ∩ Con_Num_WA > λ linked vehicle.add(x) type = Close-Following pattern if δt > α∪d > β |
| linked vehicle.add(x) type = Alternative-Route or Long-Range-Following pattern return linked vehicle, type |
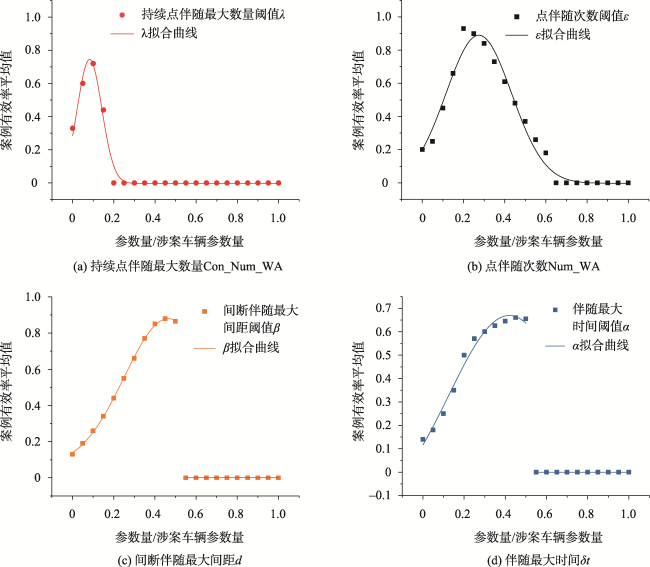
图3 时空约束参数阈值定量分析Fig. 3 Quantitative analysis of spatio-temporal constraint parameter thresholds |
表1 参数量与涉案车辆参数量对应表Tab. 1 Correspondence between parameters and parameter values of vehicles involved |
| 时空约束参数 | 参数量 | 涉案车辆参数量 |
|---|---|---|
| 持续点伴随最大数量Con_Num_WA | 持续点伴随最大数量阈值λ | 涉案车辆所经监测点数量 |
| 点伴随次数Num_WA | 点伴随次数阈值ε | 涉案车辆所经监测点数量 |
| 间断伴随最大间距d | 间断伴随最大间距阈值β | 涉案车辆轨迹起终点距离 |
| 伴随最大时间δt | 伴随最大时间阈值α | 涉案车辆行驶时间 |
表2 频繁序列挖掘方法的结果Tab. 2 Results of frequent sequence mining methods |
| 编号 | 车辆id | 支持度 |
|---|---|---|
| 1 | G***37V | 0.88 |
| 2 | D**3D1 | 0.86 |
| 3 | P**0X9 | 0.86 |
| 4 | G**8T3 | 0.83 |
| 5 | B***105 | 0.78 |
| 6 | G**985 | 0.66 |
| 7 | B***H46 | 0.48 |
| 8 | P**794 | 0.46 |
表3 基于点伴随关联图计算伴随概率方法的结果Tab. 3 Results of the method for calculating associated probabilities |
| 编号 | 车辆id | 伴随概率/% |
|---|---|---|
| 1 | H***998 | 22 |
| 2 | B***H46 | 22 |
| 3 | G**985 | 18 |
| 4 | B**2H0 | 18 |
| 5 | K***766 | 16 |
| 6 | P**794 | 16 |
| 7 | P**0X9 | 8 |
表4 不同方法在时空关联模式发现中的有效性Tab. 4 Effectiveness of different methods in spatio-temporal associated pattern discovery |
| 方法 | 近距离伴 随模式 | 故意远距离 跟随模式 | 另择路线 前往模式 |
|---|---|---|---|
| 频繁序列挖掘 | √ | √ | × |
| 计算伴随概率 | √ | × | × |
| 本文方法 | √ | √ | √ |
| [1] |
|
| [2] |
|
| [3] |
林艳, 贺日兴, 陈军, 等. 顾及时空“点-线”关联特征的出行轨迹描述模型[J]. 测绘学报, 2022, 51(8):1807-1816.
[
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
李俊豪. 基于交通轨迹大数据的伴随车辆发现算法与研究[D]. 重庆: 重庆邮电大学, 2022.
[
|
| [13] |
Wikipedia. AutomaticNumberPlateRecognition[EB/OL]. http://en.wikipedia.org/wiki/Automatic_number-plate_recognition.
|
| [14] |
董劲恒. 基于Spark的并行化FP-Growth优化算法研究与伴随车辆检测方法应用[D]. 西安: 西安电子科技大学, 2021.
[
|
| [15] |
李亮. 基于优化关联规则的车辆轨迹分析研究[D]. 济南: 山东大学, 2020.
[
|
| [16] |
刘惠惠, 张祖平, 龙哲. 基于Spark的FP-Growth伴随车辆发现与应用[J]. 计算机工程与应用, 2018, 54(8):7-13,35.
[
|
| [17] |
程一民. 基于改进的Apriori算法在车辆轨迹分析中的应用研究[D]. 抚州: 东华理工大学, 2020.
[
|
| [18] |
曹波, 韩燕波, 王桂玲. 基于车牌识别大数据的伴随车辆组发现方法[J]. 计算机应用, 2015, 35(11):3203-3207.
[
|
| [19] |
王路辉, 王桂玲. 基于车牌识别流数据的伴随车辆发现算法[J]. 计算机工程, 2017, 43(8):193-199.
[
|
| [20] |
陶虹妃. 基于时空轨迹的伴随车发现方法研究与实现[D]. 重庆: 重庆邮电大学, 2020.
[
|
| [21] |
方炜, 李万清, 俞东进, 等. 时空大数据的伴随车高效挖掘算法研究[J]. 工业控制计算机, 2016, 29(3):18-20.
[
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
王保全, 蒋同海, 周喜, 等. 类自动车牌识别轨迹数据的伴随车辆组挖掘[J]. 计算机应用, 2017, 37(11):3064-3068,3094.
[
|
| [30] |
胡玉玲. 基于卡口监控数据的车辆轨迹判定系统的设计与实现[D]. 武汉: 华中科技大学, 2017.
[
|
| [31] |
赵卓峰, 卢帅, 韩燕波. 基于海量车牌识别数据的相似轨迹查询方法[J]. 清华大学学报(自然科学版), 2017, 57(2):220-224.
[
|
| [32] |
朱美玲, 王雄斌, 张守利, 等. 基于大规模流式车牌识别数据的即时伴随车辆发现[J]. 中国科学技术大学学报, 2016, 46(1):47-55.
[
|
| [33] |
朱美玲, 刘晨, 王雄斌, 等. 基于车牌识别流数据的车辆伴随模式发现方法[J]. 软件学报, 2017, 28(6):1498-1515.
[
|
| [34] |
方艾芬, 李先通, 蔄世明, 等. 基于关联规则挖掘的伴随车辆发现算法[J]. 计算机应用与软件, 2012, 29(2):94-96,144.
[
|
| [35] |
中华人民共和国住房和城乡建设部. 城市道路工程设计规范:CJJ 37-2012(2016)[S]. 北京: 中国标准出版社, 2016.
[Ministry of Housing and Urban-Rural Development. Code for design of urban road engineering:CJJ 37-2012(2016)[S]. BeiJing: Standards Press of China, 2016.]
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}