
Journal of Geo-information Science >
Outdoor Hiking Navigation Road Network Map Construction Using Crowd-Source Trajectory Data
Received date: 2024-08-29
Revised date: 2024-11-25
Online published: 2025-01-23
Supported by
National Natural Science Foundation of China(42271462)
National Natural Science Foundation of China(42171441)
National Key Research and Development Program of China(2022YFB3904203)
Hunan Provincial Natural Science Foundation of China(2022JJ30703)
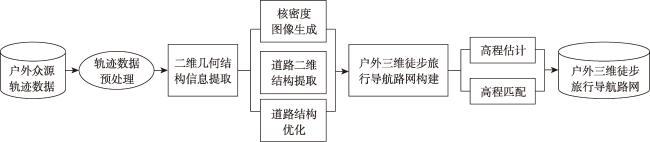
[Objectives] The outdoor pedestrian navigation road network is a vital component of maps and a crucial basis for outdoor activity route planning and navigation. It plays a significant role in promoting outdoor travel development and ensuring safety management. However, existing research on road network generation mainly focuses on the construction of urban vehicular navigation networks, with relatively less emphasis on hiking navigation road networks in complex outdoor environments. Moreover, existing methods primarily emphasize the extraction of two-dimensional geometric information of roads, while the reconstruction of real three-dimensional geometric and topological structures remains underdeveloped. [Methods] To address these limitations, this study proposes a method for constructing the three-dimensional outdoor pedestrian navigation road network maps using crowdsourced trajectory data. This approach leverages a road network generation layer and an elevation extraction layer to extract the two-dimensional structure and three-dimensional elevation information of the road network. In the road network generation layer, a trajectory density stratification strategy is adopted to construct the two-dimensional vector road network. In the elevation extraction layer, elevation estimation and optimization are performed to generate an elevation grid raster map, which is then matched with the two-dimensional road network to produce the three-dimensional hiking navigation road network. [Results] To demonstrate the effectiveness of the proposed approach, experiments were conducted using 1 170 outdoor trajectories collected in 2021 from Yuelu Mountain Scenic Area in Changsha through an online outdoor website. The constructed outdoor three-dimensional hiking road network map achieved an average positional offset of 4.201 meters in two-dimensional space and an average elevation estimation error of 7.656 meters. The results demonstrate that the proposed method effectively handles outdoor trajectory data with high noise and varied trajectory density distribution differences, generating high-quality three-dimensional hiking road network maps. [Conclusions] Compared to traditional outdoor two-dimensional road networks, the three-dimensional navigation road networks constructed this study provide more comprehensive and accurate map information, facilitating improved pedestrian path planning and navigation services in complex outdoor environments.
TANG Jianbo , XIA Heyan , PENG Ju , HU Zhiyuan , DING Junjie , ZHANG Yuyu . Outdoor Hiking Navigation Road Network Map Construction Using Crowd-Source Trajectory Data[J]. Journal of Geo-information Science, 2025 , 27(1) : 151 -166 . DOI: 10.12082/dqxxkx.2025.240479
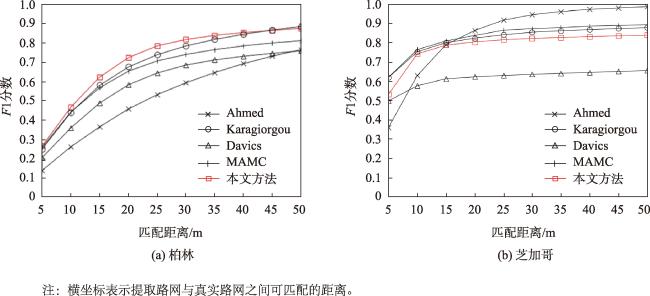
图7 柏林和芝加哥路网提取F1分数评价结果Fig. 7 The evaluation of the road network extraction results on the Berlin and Chicago datasets using F1-score |
利益冲突:Conflicts of Interest 所有作者声明不存在利益冲突。
All authors disclose no relevant conflicts of interest.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
陆川伟, 孙群, 陈冰, 等. 车辆轨迹数据的道路学习提取法[J]. 测绘学报, 2020, 49(6):692-702.
[
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
范红超, 孔格菲, 杨岸然, 等. 众源地理信息研究现状与展望[J]. 测绘学报, 2022, 51(7):1653-1668.
[
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
刘敬一, 彭举, 唐建波, 等. 融合多特征的轨迹数据自适应聚类方法[J]. 地球信息科学学报, 2023, 25(7):1363-1377.
[
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
陈欣, 向隆刚, 焦凤伟. 基于众源轨迹的OSM路网转向信息增强[J]. 地球信息科学学报, 2023, 25(10):1954-1967.
[
|
| [24] |
李思宇, 向隆刚, 张彩丽, 等. 基于低频出租车轨迹的城市路网交叉口提取研究[J]. 地球信息科学学报, 2019, 21(12):1845-1854.
[
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
郑恬静, 黄金彩, 周宝定, 等. 基于众源轨迹数据的行人路网提取[J]. 测绘通报, 2021,3:69-74.
[
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
周宝定, 张文香, 黄金彩, 等. 基于众源数据的室内外一体化行人路网构建[J]. 测绘学报, 2022, 51(5):718-728.
[
|
| [33] |
|
| [34] |
|
| [35] |
淦文燕, 李德毅. 基于核密度估计的层次聚类算法[J]. 系统仿真学报, 2004, 16(2):302-305,309.
[
|
| [36] |
刘锐, 胡伟平, 王红亮, 等. 基于核密度估计的广佛都市区路网演变分析[J]. 地理科学, 2011, 31(1):81-86.
[
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
王少槐. 基于GPS轨迹的路网生成与地图匹配算法研究[D]. 广州: 华南理工大学, 2019.
[
|
| [41] |
高文超, 李国良, 塔娜. 路网匹配算法综述[J]. 软件学报, 2018, 29(2):225-250.
[
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
csu-mapping. Yuelu trajectory data[DS/OL].[2021-11-30].
|
/
| 〈 |
|
〉 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}