
Journal of Geo-information Science >
Lightweight Research on Ship Target Detection in Large-scale SAR Images
Received date: 2024-10-15
Revised date: 2024-11-28
Online published: 2025-01-23
Supported by
Equipment Comprehensive Research Scientific Project(a8203)
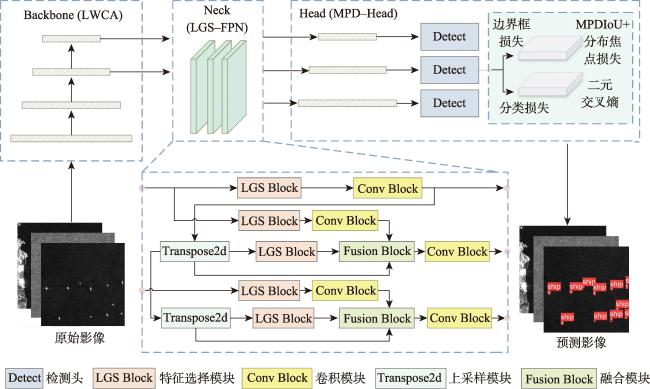
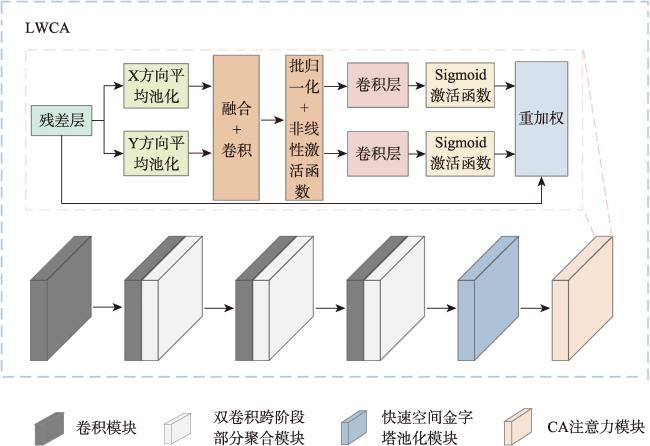
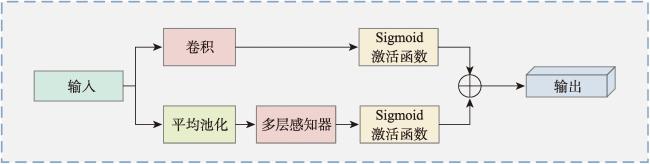
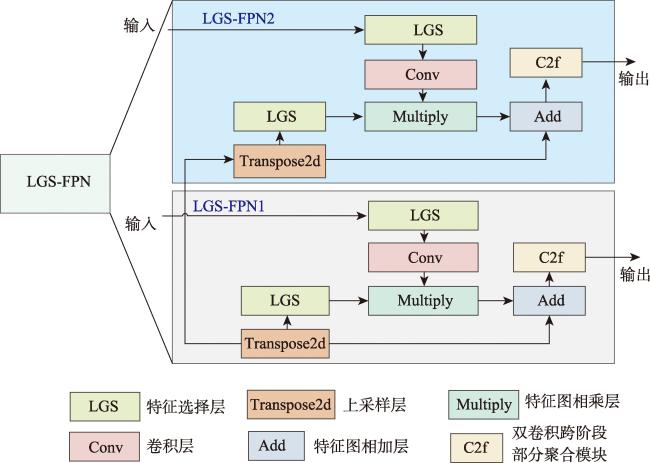
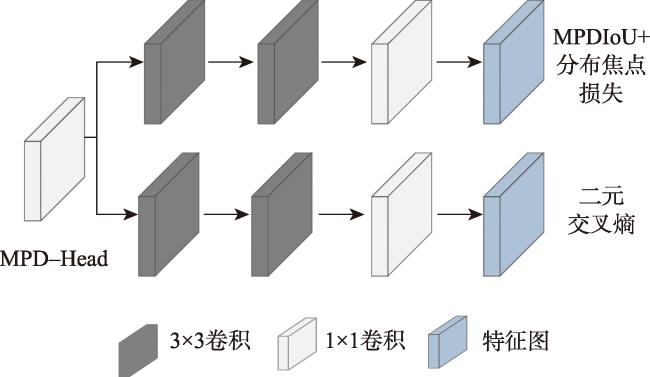
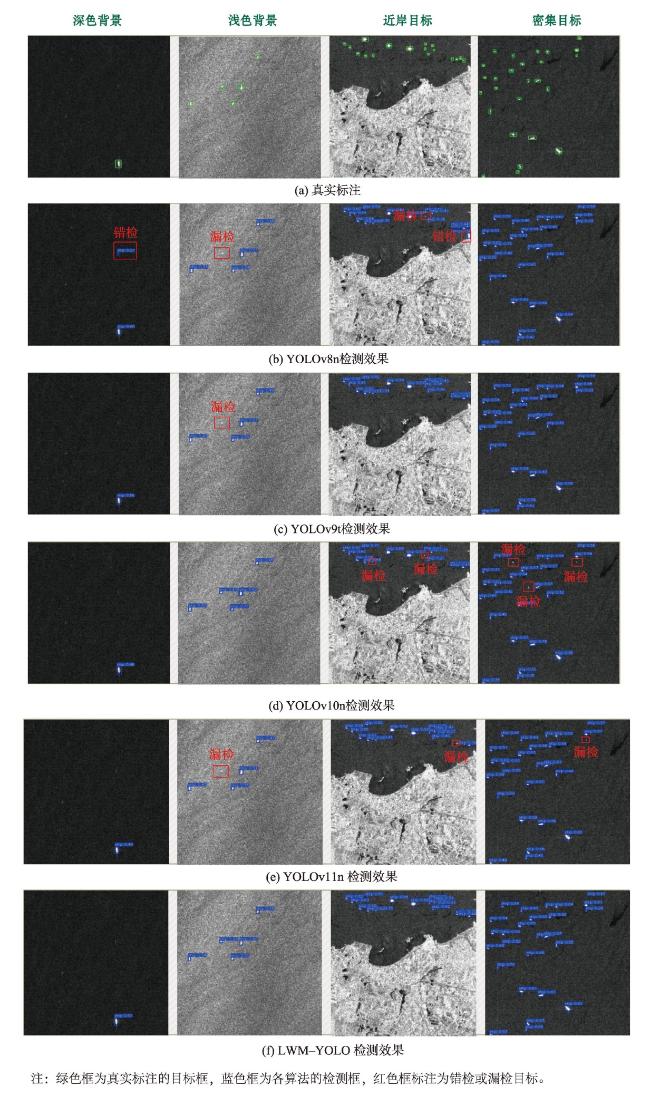
[Objectives] Ship detection using Synthetic Aperture Radar (SAR) images has gained widespread recognition and application across various fields, including marine search and rescue, port reconnaissance, and territorial sea defense. Nevertheless, with the rapid advancement of on-orbit intelligent processing technologies, higher demands have emerged for real-time detection of ship targets in spaceborne SAR images. [Methods] To address challenges such as the diverse scales of ship targets in current SAR images, the complex background of shore-based vessels, and the limited hardware resources of various remote sensing platforms, this paper presents a lightweight SAR image ship detection model, LWM-YOLO. Firstly, we propose a Lightweight Backbone Network (LWCA) designed specifically for SAR image processing. The LWCA integrates an optimized backbone network with an attention mechanism, effectively reducing the model's complexity and parameter size while maintaining high performance and lowering computational demands. Secondly, to tackle the issue of diverse target scales in SAR images, we have constructed a lightweight feature fusion module, termed LGS-FPN. This module enhances the extraction of detailed information on ship targets in SAR images by efficiently fusing features from different scales, improving detection performance for ship targets of various sizes. Furthermore, the module minimizes computational complexity, ensuring that the model can operate smoothly without significant resource consumption. In addition to addressing the scale issue, we have also focused on optimizing localization accuracy. We introduce a detection architecture based on the MPD-Head, which leverages the strengths of the MPD-Head to improve detection performance for small ship targets in complex environments. Finally, we validate the proposed algorithm through comparative experiments with mainstream methods on the LS-SSDD and SSDD ship detection datasets. [Results] The results demonstrate that our algorithm achieved mean Average Precision (mAP) values of 74.7% and 97.3% on the respective datasets, representing improvements of 1.5 and 1.0 percentage points over the baseline model. Additionally, the parameter size of our model was reduced to 36% of the baseline model, and computational complexity decreased to 80%. [Conclusions] Compared to other mainstream algorithms, the proposed method demonstrates not only higher accuracy but also significant advantages in detection speed. These findings can provide robust support for intelligent target detection, space-based in-orbit applications, and related fields.
ZHANG Yao , ZHANG Yan , WANG Tao , WANG Buyun . Lightweight Research on Ship Target Detection in Large-scale SAR Images[J]. Journal of Geo-information Science, 2025 , 27(1) : 256 -270 . DOI: 10.12082/dqxxkx.2025.240574
表1 环境配置Tab. 1 Environment configuration |
| 参数 | 配置 |
|---|---|
| 操作系统 | Ubuntu22.04 |
| GPU | Geforce RTX 2060Ti 6 G |
| CPU | AMD Ryzen 7 3700 X |
| 内存 | 16 G |
| 深度学习框架 | Pytorch12.0 |
| Python版本 | 3.8 |
| GPU加速平台 | CUDA11.4 |
表2 LWM-YOLO对比实验Tab. 2 LWM-YOLO comparison experiments |
| 数据集 | 网络模型 | 精确率 | 召回率 | mAP | FLOPs/G | 参数量/M | FPS/(帧/s) |
|---|---|---|---|---|---|---|---|
| LS-SSDD | FreeAnchor[40] | 0.553 | 0.777 | 0.710 | 127.82 | 36.33 | 11.47 |
| DCN[41] | 0.741 | 0.769 | 0.738 | 116.82 | 41.93 | 10.05 | |
| EfficientDet[42] | 0.621 | 0.675 | 0.614 | 107.52 | 39.40 | 11.42 | |
| YOLOv8n | 0.812 | 0.660 | 0.732 | 8.10 | 3.01 | 148.32 | |
| YOLOv9t | 0.853 | 0.661 | 0.741 | 7.60 | 1.97 | 120.92 | |
| YOLOv10n | 0.780 | 0.616 | 0.703 | 8.20 | 2.69 | 128.25 | |
| YOLOv11n | 0.825 | 0.646 | 0.729 | 6.30 | 2.58 | 138.38 | |
| 本文方法 | 0.837 | 0.672 | 0.747 | 6.50 | 1.07 | 152.40 | |
| SSDD | PANET[43] | 0.868 | 0.919 | 0.912 | — | — | 11.65 |
| Grid R-CNN[44] | 0.878 | 0.897 | 0.890 | — | — | 9.18 | |
| YOLOv8n | 0.942 | 0.956 | 0.963 | 8.10 | 3.01 | 691.51 | |
| YOLOv9t | 0.959 | 0.916 | 0.969 | 7.60 | 1.97 | 707.03 | |
| YOLOv10n | 0.920 | 0.964 | 0.960 | 8.20 | 2.69 | 757.44 | |
| YOLOv11n | 0.961 | 0.964 | 0.970 | 6.30 | 2.58 | 725.33 | |
| 本文方法 | 0.941 | 0.965 | 0.973 | 6.50 | 1.07 | 729.90 |
注:加粗数值表示最优值。 |
表3 LWM-YOLO消融实验Tab. 3 LWM-YOLO ablation experiment |
| 网络模型 | 精确率 | 召回率 | mAP | FLOPs/G | 参数量/M | FPS/(帧/s) |
|---|---|---|---|---|---|---|
| YOLOv8n | 0.812 | 0.660 | 0.732 | 8.1 | 3.01 | 148.32 |
| YOLOv8n-M | 0.833 | 0.644 | 0.729 | 8.1 | 3.01 | 146.92 |
| YOLOv8n-LGS | 0.823 | 0.669 | 0.743 | 7.1 | 2.03 | 149.23 |
| YOLOv8n-L | 0.824 | 0.654 | 0.727 | 7.5 | 2.23 | 152.28 |
| YOLOv8n-L-LGS | 0.819 | 0.667 | 0.738 | 6.5 | 1.07 | 152.81 |
| YOLOv8n-L-LGS-M | 0.837 | 0.672 | 0.747 | 6.5 | 1.07 | 152.40 |
注:加粗数值表示最优值。“-L”表示使用LWCA骨干网络;“-LGS”使用LGS-FPN特征融合策略;“-M”表示MPD-Head。 |
表4 更换特征融合网络的实验结果Tab. 4 Experimental results of altering the feature fusion network |
| 网络模型 | 精确率 | 召回率 | mAP | FLOPs/G | 参数量/M | FPS/(帧/s) |
|---|---|---|---|---|---|---|
| YOLOv8n-PAFPN | 0.812 | 0.66 | 0.732 | 8.1 | 3.01 | 148.32 |
| YOLOv8n-HSFPN | 0.813 | 0.649 | 0.728 | 6.9 | 1.93 | 148.07 |
| YOLOv8n-LGSFPN | 0.823 | 0.669 | 0.743 | 7.1 | 2.03 | 149.23 |
注:加粗数值表示最优值。 |
利益冲突:Conflicts of Interest 所有作者声明不存在利益冲突。
All authors disclose no relevant conflicts of interest.
| [1] |
王桥. 中国环境遥感监测技术进展及若干前沿问题[J]. 遥感学报, 2021, 25(1):25-36.
[
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
程传祥, 金飞, 林雨准, 等. 应用多尺度融合策略和改进YOLOV5的道路病害无人机检测[J]. 地球信息科学学报, 2024, 26(8):1991-2007.
[
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
陈丁, 万刚, 李科. 多层特征与上下文信息相结合的光学遥感影像目标检测[J]. 测绘学报, 2019, 48(10):1275-1284.
[
|
| [22] |
苏娟, 杨龙, 黄华, 等. 用于SAR图像小目标舰船检测的改进SSD算法[J]. 系统工程与电子技术, 2020, 42(5):1026-1034.
[
|
| [23] |
贾晓雅, 汪洪桥, 杨亚聃, 等. 基于YOLO框架的无锚框SAR图像舰船目标检测[J]. 系统工程与电子技术, 2022, 44(12):3703-3709.
[
|
| [24] |
高鹏飞, 曹雪峰, 李科, 等. 融合多元稀疏特征与阶层深度特征的遥感影像目标检测[J]. 地球信息科学学报, 2023, 25(3):638-653.
[
|
| [25] |
杨金鹏, 黄柏圣, 陈小娇, 等. 一种改进YOLOV5的遥感和SAR图像舰船目标检测[J]. 中国电子科学研究院学报, 2023, 18(9):821-829.
[
|
| [26] |
薛远亮, 金国栋, 侯笑晗, 等. 融合注意力机制与改进SSD算法的SAR舰船目标检测方法[J]. 计算机应用研究, 2022, 39(1):265-269.
[
|
| [27] |
|
| [28] |
李健伟, 曲长文, 彭书娟. SAR图像舰船目标联合检测与方向估计[J]. 武汉大学学报(信息科学版), 2019, 44(6):901-907.
[
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}