
Journal of Geo-information Science >
From Geographic Information System to Geographic Intelligent Agent
Received date: 2024-11-27
Revised date: 2025-01-09
Online published: 2025-01-23
Supported by
National Key Research and Development Program of China(2021YFB3900901)
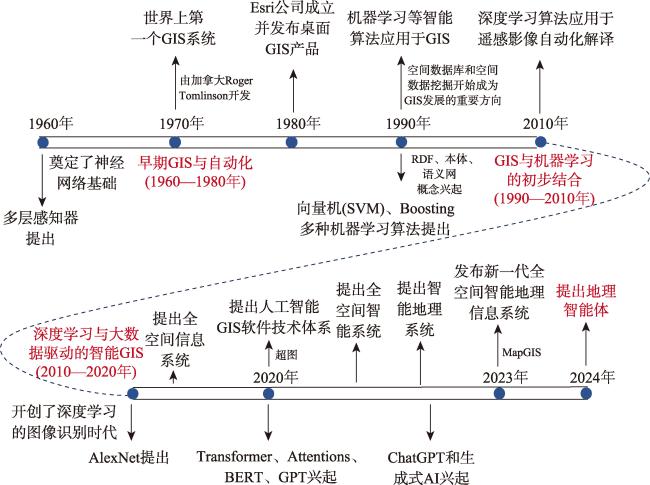
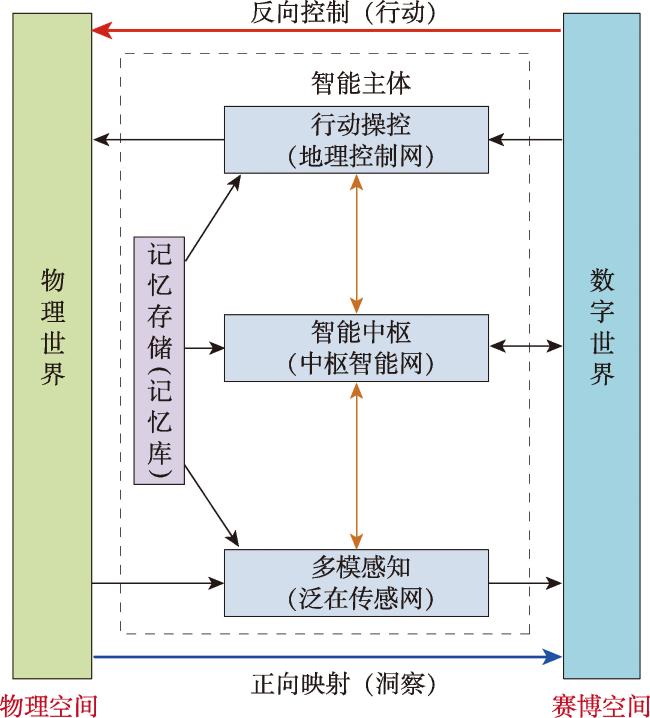
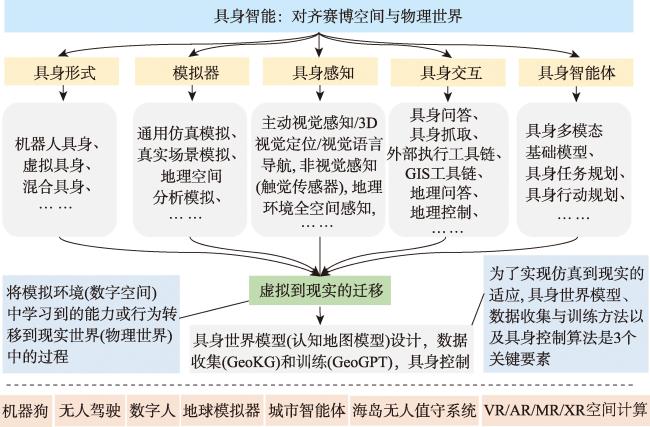
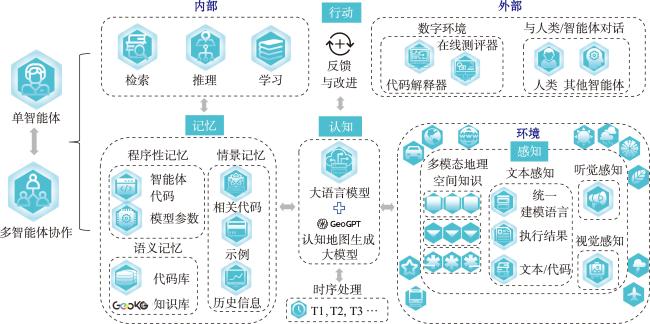
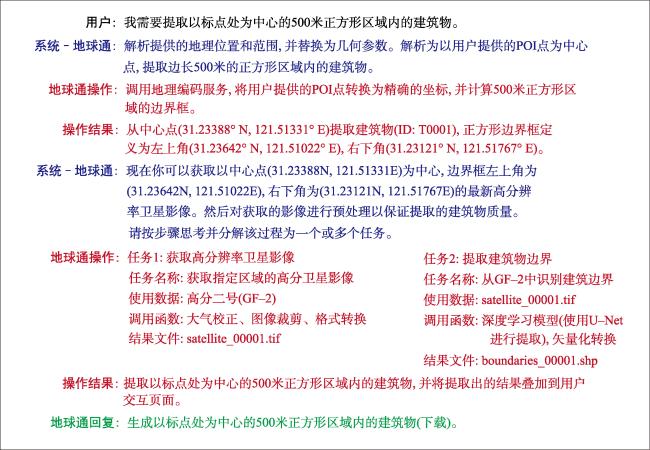
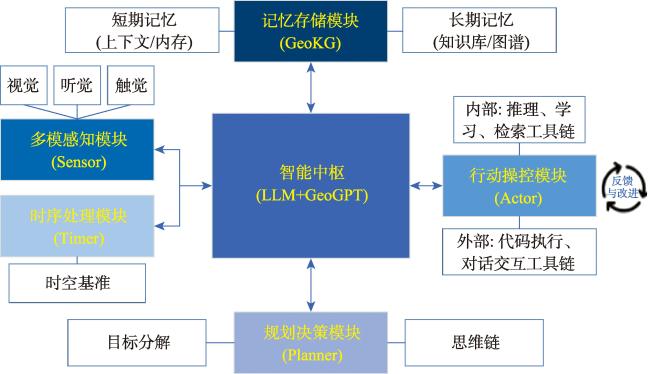
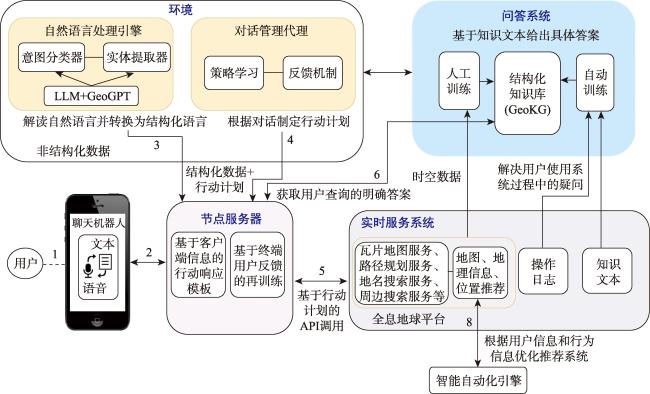
[Objectives] The geographic system is an integrated framework encompassing natural and human phenomena and their interrelationships on the Earth's surface. While Geographic Information Systems (GIS) can digitally process these geographic elements, they face challenges in addressing rapidly changing geographic contexts with complex 3D structures. This is primarily due to the lack of bi-directional interactions between physical and informational spaces, as well as their reliance on predefined rules and historical data. In this paper, we propose the concept of a “Geographic Intelligent Agent” as an advanced form of GIS, which integrates embodied intelligence, self-supervised learning, and multimodal language modeling to improve environmental perception, spatial understanding, and autonomous decision-making. [Methods] The architecture of the geographic intelligent agent consists of three core components: multimodal perception, an intelligent hub, and an action manipulation module. These components collectively acquire comprehensive environmental information through sensor networks, perform complex situatio reasoning using knowledge graphs and generative models, and enable real-time control and multilevel planning of the physical environment. To adapt to differences between virtual and real environments, the geographic intelligent agent is tested using the earth simulator and a test field platform, equipping it with stronger autonomous capabilities in complex and dynamic geographic contexts. [Results] This paper also demonstrates the implementation of geographic intelligent agent in spatial intelligence applications using the virtual digital human “EarthSage” as an example. [Conclusion] As a prototype of the geographic intelligent agent, "EarthSage" integrates modules such as the spatiotemporal Knowledge Ggraph (GeoKG) and a Cognitive Map Generation Model (GeoGPT), assisting users in obtaining intelligent spatial decision-making support in fields such as emergency management, urban planning, and ecological monitoring. This work exemplifies the transformation of GIS from a traditional information processing tool to an autonomous spatial intelligent system, marking a significant advancement in the field.
LUO Bin , LIU Wenhao , WU Jin , HAN Jiafu , WU Wenzhou , LI Hongsheng . From Geographic Information System to Geographic Intelligent Agent[J]. Journal of Geo-information Science, 2025 , 27(1) : 83 -99 . DOI: 10.12082/dqxxkx.2025.240658
利益冲突:Conflicts of Interest 所有作者声明不存在利益冲突。
All authors disclose no relevant conflicts of interest.
| [1] |
陈述彭. 地理系统与地理信息系统[J]. 地理学报, 1991, 46(1):1-7.
[
|
| [2] |
陈健飞, 连莲. 地理信息系统导论[M]. 北京: 科学出版社, 2003.
[
|
| [3] |
高松. 地理空间人工智能的近期研究总结与思考[J]. 武汉大学学报(信息科学版), 2020, 45(12):1865-1874.
[
|
| [4] |
张永生, 张振超, 童晓冲, 等. 地理空间智能研究进展和面临的若干挑战[J]. 测绘学报, 2021, 50(9):1137-1146.
[
|
| [5] |
苏奋振, 吴文周, 张宇, 等. 从地理信息系统到智能地理系统[J]. 地球信息科学学报, 2020, 22(1):2-10.
[
|
| [6] |
李德仁, 朱欣焰, 龚健雅. 从数字地图到空间信息网格——空间信息多级网格理论思考[J]. 武汉大学学报(信息科学版), 2003, 28(6):642-650.
[
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
周成虎. 全空间地理信息系统展望[J]. 地理科学进展, 2015, 34(2):129-131.
[
|
| [11] |
李德仁. 展望大数据时代的地球空间信息学[J]. 测绘学报, 2016, 45(4):379-384.
[
|
| [12] |
黎夏, 叶嘉安, 刘小平, 等. 地理模拟系统:元胞自动机与多智能体[M]. 北京: 科学出版社, 2007.
[
|
| [13] |
|
| [14] |
高俊, 曹雪峰. 空间认知推动地图学学科发展的新方向[J]. 测绘学报, 2021, 50(6):711-725.
[
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
何诗, 阴劼. 认知地图的地理学研究进展与展望[J]. 地理科学进展, 2022, 41(1): 73-85.
[
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
罗斌, 任丽秋, 毛悦, 等. 全息地球数据立方体模型研究[J]. 地球信息科学学报, 2023, 25(7):1282-1296.
[
|
| [34] |
黄勃, 吴申奥, 王文广, 等. 图模互补:知识图谱与大模型融合综述[J]. 武汉大学学报(理学版), 2024, 70(4):397-412.
[
|
| [35] |
|
| [36] |
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}