
Journal of Geo-information Science >
A Three-Dimensional Lunar Rover Simulation Method for Safety Assessment of Lunar Surface Routes
Received date: 2024-07-14
Revised date: 2024-08-19
Online published: 2025-03-25
Supported by
National Natural Science Foundation of China(42371422)
National Natural Science Foundation of China(42221002)
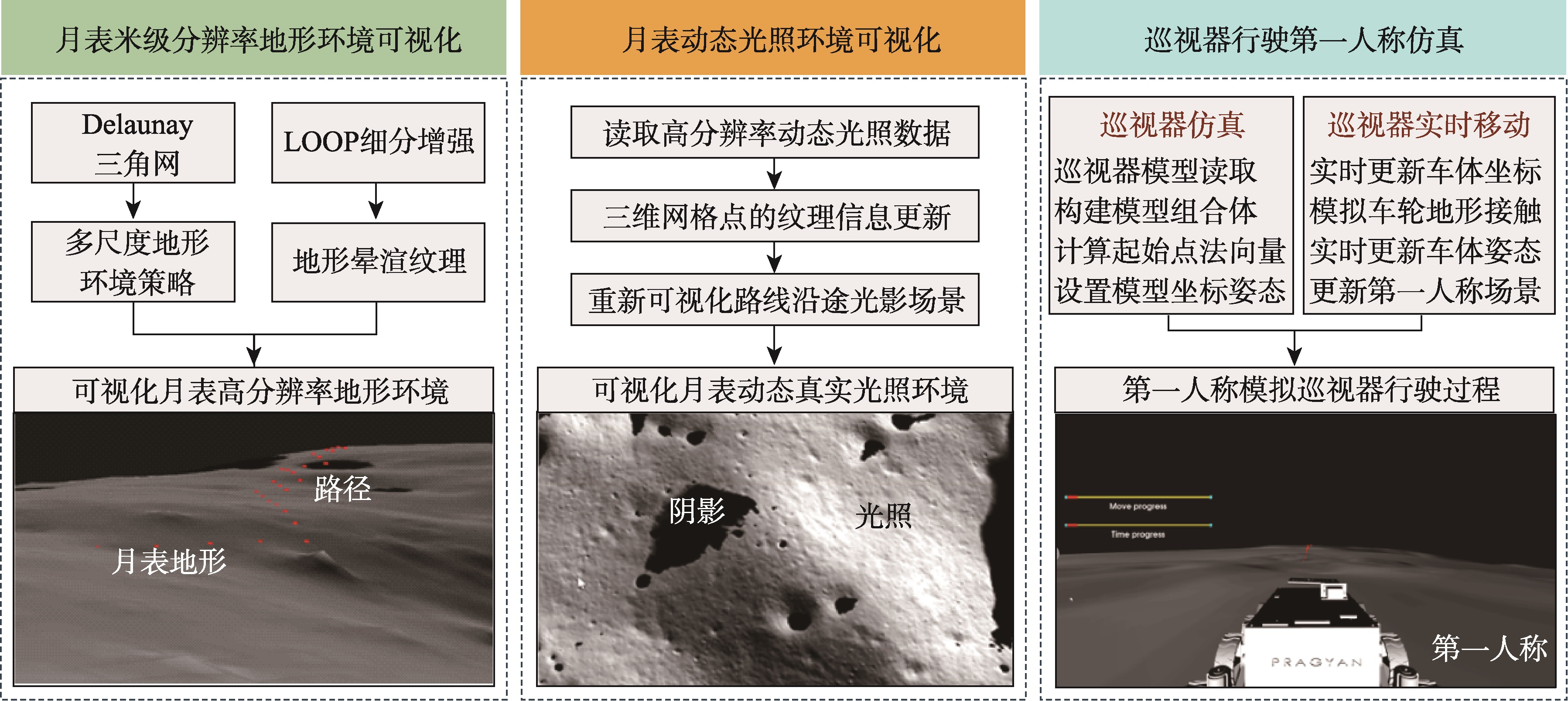
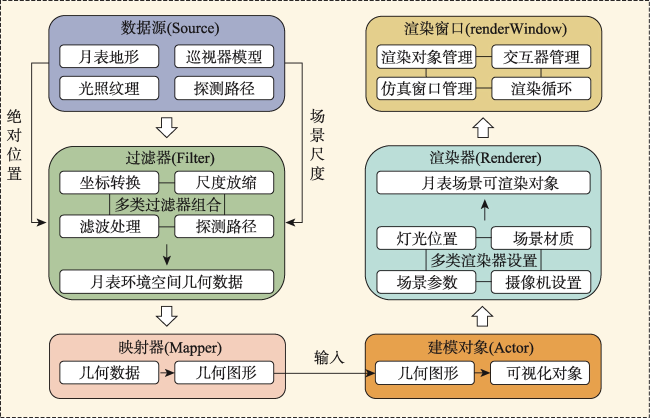
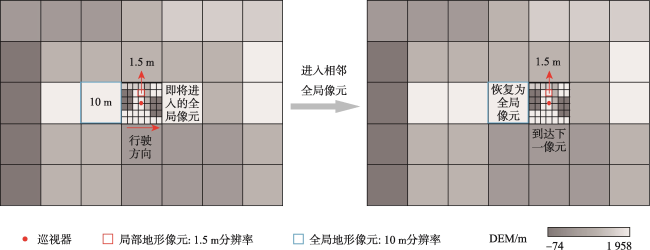
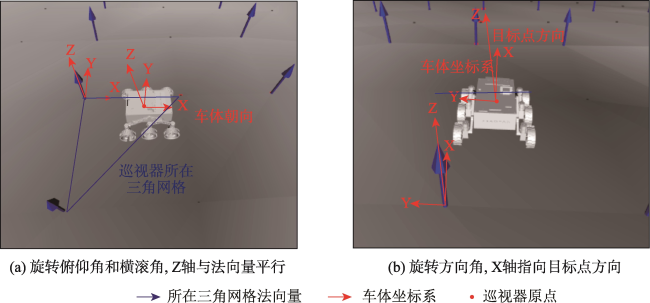
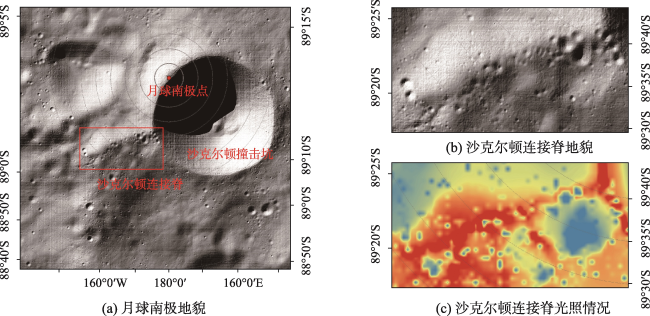
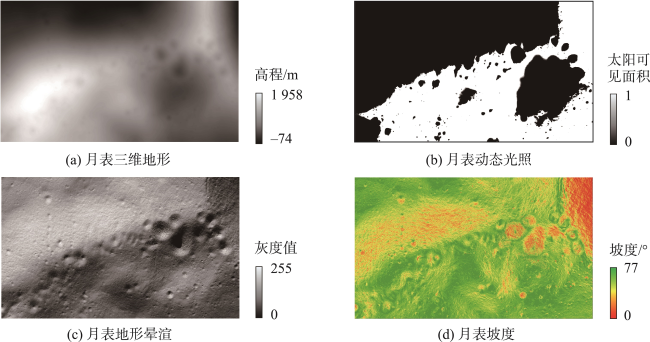
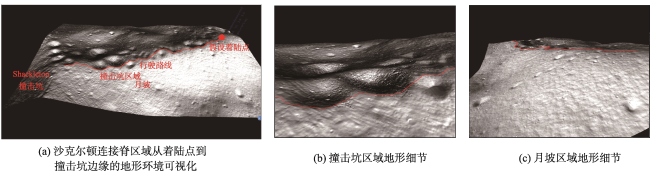
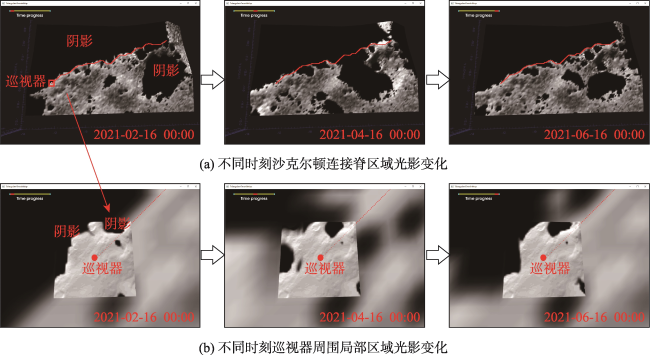
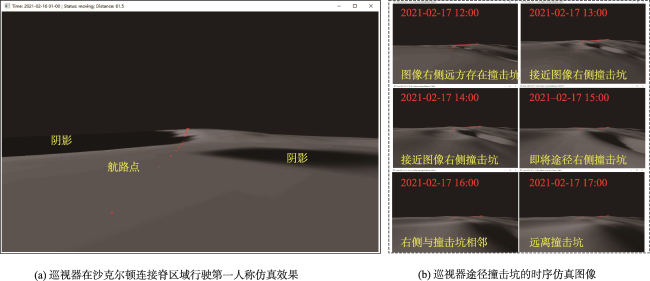
[Objectives] Rovers play an essential role in lunar exploration, serving as vital tools for scientists aiming to unravel the Moon's geological history and exploit its potential water-ice reserves. However, navigating the lunar surface with rovers presents significant safety risks due to the complex and often hazardous terrain, compounded by the lack of a consistent and reliable light source. The absence of pre-existing, high-resolution data—such as LiDAR—prior to exploration missions poses a considerable challenge in evaluating the safety of potential rover paths. Given these constraints, developing a reliable pre-assessment method is crucial for enhancing the success rate of lunar rover missions. [Methods] This paper introduces a 3D simulation method for lunar rover exploration, leveraging the Visualization Toolkit (VTK) to address these challenges. Our method integrates three critical aspects. Firstly, it offers high-resolution visualization of the lunar surface terrain, capturing intricate details down to the meter scale. Secondly, it simulates the dynamic illumination environment on the lunar surface, accounting for the varying illumination conditions due to the Moon 's rotation and orbital position. Thirdly, it models the rover's position and attitude transformations as it navigates the terrain. [Results] The effectiveness of this simulation approach is demonstrated through a case study focusing on the Shackleton Connecting Ridge region at the lunar South Pole, an area of significant interest due to its challenging topography and potential for water-ice deposits. The 3D simulation accurately depicts the undulating terrain of impact craters and allows for a thorough assessment of the rover's route safety by visualizing the potential hazards along the path. Moreover, the simulation offers an intuitive representation of the rover's movement, including real-time adjustments in position and attitude, which are critical for ensuring the rover’s stability and operational safety over long distances. Additionally, our method includes a real-time update feature for the dynamic illumination scene, enabling direct observation of how changing light conditions affect the rover's path during the mission. This capability is particularly important for assessing the feasibility of navigating through areas that may experience prolonged periods of darkness or extreme shadowing, which could impede the rover's progress or jeopardize its safety. The goal of this research is to improve the reliability and safety of future lunar rover missions by providing a robust pre-assessment tool that can verify the feasibility of proposed exploration routes. [Conclusions] This method thus offers crucial a priori information, serving as an essential guarantee for the successful execution of future lunar exploration endeavors.
LI Pengshuo , FENG Yongjiu , TONG Xiaohua , XI Mengrong , XU Xiong , LIU Shijie , HUANG Qian . A Three-Dimensional Lunar Rover Simulation Method for Safety Assessment of Lunar Surface Routes[J]. Journal of Geo-information Science, 2025 , 27(4) : 864 -875 . DOI: 10.12082/dqxxkx.2025.240401
表1 本研究使用的栅格数据集Tab. 1 The raster datasets used in this study |
表2 巡视器移动安全评估指标Tab. 2 The indicators for evaluating the mobile safety of rovers |
| 安全指标 | 平均值 | 最大值 | 最小值 | 移动风险评估结果 |
|---|---|---|---|---|
| 俯仰角变化量/° | 0.407 | 5.493 | 0 | 低风险 |
| 横滚角变化量/° | 0.290 | 3.930 | 0 | 低风险 |
| 航向角变化量/° | 0.124 | 46.037 | 0 | 低风险 |
| 地形坡度/° | 7.341 | 15.092 | 0.213 | 中等风险 |
| 太阳光照 | 0.492 | 0.980 | 0.264 | 低风险 |
| [1] |
欧阳自远. 我国月球探测的总体科学目标与发展战略[J]. 地球科学进展, 2004, 19(3):351-358.
[
|
| [2] |
童小华, 刘世杰, 谢欢, 等. 从地球测绘到地外天体测绘[J]. 测绘学报, 2022, 51(4):488-500.
[
|
| [3] |
吴伟仁, 刘继忠, 唐玉华, 等. 中国探月工程[J]. 深空探测学报, 2019, 6(5):405-416.
[
|
| [4] |
贾瑛卓, 覃朗, 徐琳, 等. 月球水冰探测[J]. 深空探测学报, 2020, 7(3):290-296.
[
|
| [5] |
|
| [6] |
|
| [7] |
王保丰, 周建亮, 唐歌实, 等. 嫦娥三号巡视器视觉定位方法[J]. 中国科学:信息科学, 2014, 44(4):452-460.
[
|
| [8] |
吴伟仁, 周建亮, 王保丰, 等. 嫦娥三号“玉兔号”巡视器遥操作中的关键技术[J]. 中国科学:信息科学, 2014, 44(4):425-440.
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
张静, 刘建军, 高兴烨, 等. 月面近距离探测仿真系统的实现与应用[J]. 天文研究与技术, 2017, 14(4):461-471.
[
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
曹亮, 崔平远, 居鹤华. 月球车路径规划三维仿真平台设计与实现[J]. 计算机工程, 2007, 33(20):236-238.
[
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
童小华, 刘世杰, 叶真, 等. 基于自主研制1.5米分辨率三维地形和光照模型的月球南极沙克尔顿着陆选址分析[C]. 深空探索科学技术与应用中国工程科技论坛, 深圳,2021:18-19.
[
|
| [33] |
|
| [34] |
王琼, 于登云, 贾阳. Risk Theta*:一种基于地形危险度的任意航向路径规划算法[J]. 深空探测学报, 2014, 1(4):269-274.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}