
Journal of Geo-information Science >
Research on Evaluation Standards for Spatial Cognitive Abilities in Large Language Models
Received date: 2024-12-17
Revised date: 2025-02-25
Online published: 2025-04-23
Supported by
National Natural Science Foundation of China(42371476)
Fundamental Research Funds for the Central Universities(buctrc202132)
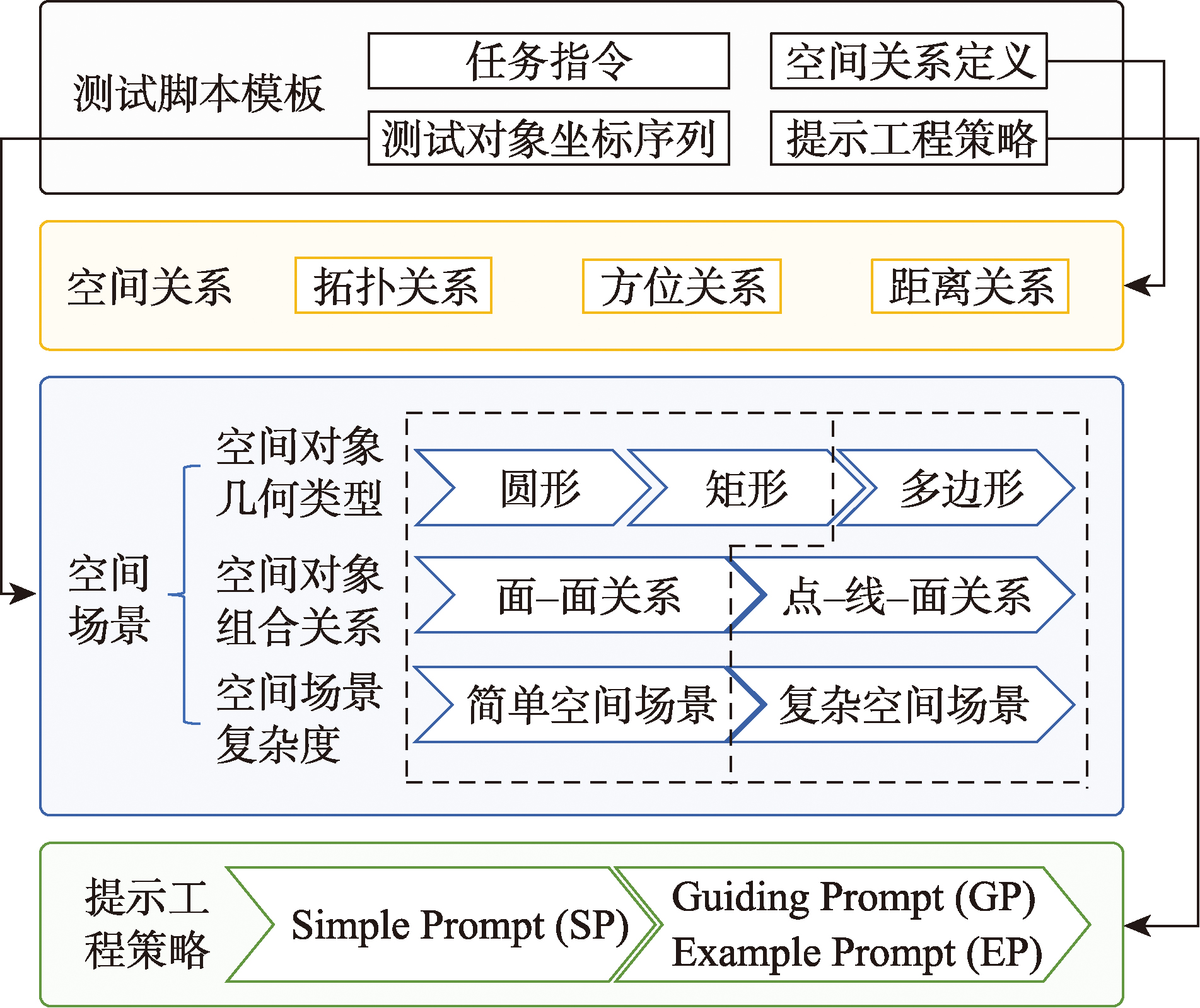
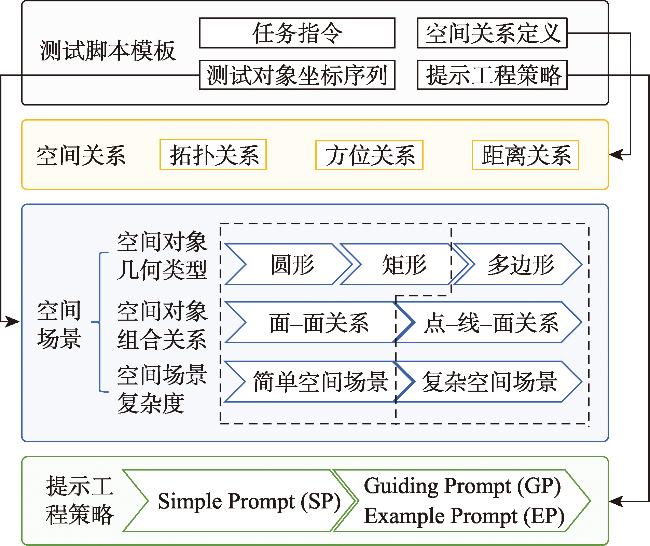
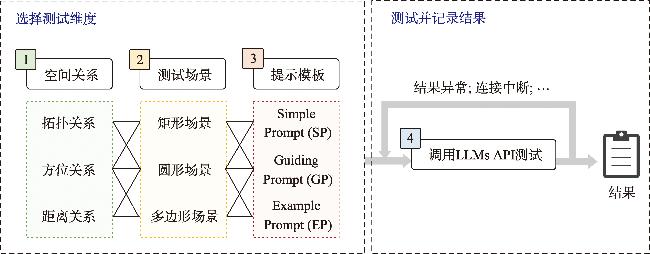
[Objectives] Understanding whether Large Language Models (LLMs) possess spatial cognitive abilities and how to quantify them are critical research questions in the fields of large language models and geographic information science. However, there is currently a lack of systematic evaluation methods and standards for assessing the spatial cognitive abilities of LLMs. Based on an analysis of existing LLM characteristics, this study develops a comprehensive evaluation standard for spatial cognition in large language models. Ultimately, it establishes a testing standard framework, SRT4LLM, along with standardized testing processes to evaluate and quantify spatial cognition in LLMs. [Methods] The testing standard is constructed along three dimensions: spatial object types, spatial relations, and prompt engineering strategies in spatial scenarios. It includes three types of spatial objects, three categories of spatial relations, and three prompt engineering strategies, all integrated into a standardized testing process. The effectiveness of the SRT4LLM standard and the stability of the results are verified through multiple rounds of testing on eight large language models with different parameter scales. Using this standard, the performance scores of different LLMs are evaluated under progressively improved prompt engineering strategies. [Results] The geometric complexity of input spatial objects influences the spatial cognition of LLMs. While different LLMs exhibit significant performance variations, the scores of the same model remain stable. As the geometric complexity of spatial objects and the complexity of spatial relations increase, LLMs' accuracy in judging three spatial relations decreases by only 7.2%, demonstrating the robustness of the test standard across different scenarios. Improved prompt engineering strategies can partially enhance LLM's spatial cognitive Question-Answering (Q&A) performance, with varying degrees of improvement across different models. This verifies the effectiveness of the standard in analyzing LLMs' spatial cognitive abilities. Additionally, Multiple rounds of testing on the same LLM indicate that the results are convergent, and score differences between different LLMs exhibit a stable distribution. [Conclusions] SRT4LLM effectively measures the spatial cognitive abilities of LLMs and serves as a standardized evaluation tool. It can be used to assess LLMs' spatial cognition and support the development of native geographic large models in future research.
WU Ruoling , GUO Danhuai . Research on Evaluation Standards for Spatial Cognitive Abilities in Large Language Models[J]. Journal of Geo-information Science, 2025 , 27(5) : 1041 -1052 . DOI: 10.12082/dqxxkx.2025.240694
| 算法1 Simple Prompt (SP) |
|---|
| 输入:空间对象形状shape; 空间对象坐标coordinate; 空间关系 定义relation 输出:Simple Prompt模板 1. 初始化Simple Prompt模板: Your task is to determine the topological relation between two closed geometrical shapes in the same coordinate system. The eight kinds of topological relations will be delimited with ``` tag. ```{relation}```. The two geometrical shapes are {shape} that will be given their positions by coordinates: {coordinate}. 2. 将具体测试数据的shape、coordinate和 relation分别替换模板 中的占位符{shape}; {coordinate}; {relation} 3. 返回生成的SP提示语 |
| 算法2 Guiding Prompt (GP) |
|---|
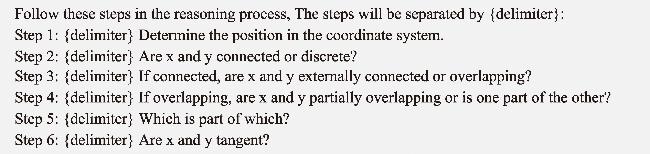
| 输入:空间对象形状shape; 空间对象坐标coordinate; 空间关系 定义relation 输出:Guiding Prompt模板 1. 初始化Guiding Prompt模板: Your task is to determine the topological relation between two closed geometrical shapes in the same coordinate system. The eight kinds of topological relations will be delimited with ``` tag. ```{relation}```. The two geometrical shapes are {shape} that will be given their positions by coordinates: {coordinate}. Pay attention to the following points in responding: (1) By specifying the range of x-coordinate and y-coordinate, clearly define the positions of two geometrical shapes in the coordinate system. (2) Two {shape} can only be overlapping if their x-coordinate and y-coordinate overlap at the same time. (3) TPP, NTPP, TPPi, NTPPi and EQ are special cases of PO and should be categorized separately if their definitions are met. If not, categorized as PO. 2. 将具体测试数据的shape、coordinate和relation分别替换模板 中的占位符{shape}; {coordinate}; {relation} 3. 返回生成的GP提示语 |
| 算法3 Example Prompt (EP) |
|---|
| 输入:空间对象形状shape; 空间对象坐标coordinate; 空间关系 定义relation 输出:Example Prompt模板 1. 初始化Example Prompt模板: Your task is to determine the topological relation between two closed geometrical shapes in the same coordinate system. The eight kinds of topological relations will be delimited with ``` tag. ```{relation}```. You will be given two cases to learn how to reason the question out. Case 1 - The two geometrical shapes are {shape} that will be given their position by coordinates: rectangle x: (5, 6), (7, 6), (7, 7), (5, 7), (5, 6); rectangle y: (4, 5), (8, 5), (8, 8), (4, 8), (4,5). Answer 1 - Based on the given coordinate information, the position of the two circles in the coordinate system can be determined: rectangle x: x-coordinate ranges from 5 to 7, y-coordinate ranges from 6 to 7. rectangle y: x-coordinate ranges from 4 to 8, y-coordinate ranges from 5 to 8. |
| Next, reason about the topological relation between two rectangles: (1). The two rectangles overlap in both the x and y coordinate ranges, so it is not DC(x, y) or EC(x, y). (2). Rectangle x's x and y coordinates are both completely contained in rectangle y, so they are not partially overlapping or identical. It is a TPP(x, y) or NTPP(x, y) relation. (3). Rectangle x and rectangle y are not tangent, so it is a NTPP(x, y) relationship. Therefore, it is concluded that the two rectangles are NTPP(x, y). Case 2 - The two geometrical shapes are {shape} that will be given their position by coordinates: rectangle x: (1, 2), (3, 2), (3, 5), (1, 5), (1, 2); rectangle y: (3, 3), (5, 3), (5, 4), (3, 4), (3, 3). Answer 2 - Based on the given coordinate information, the position of the two rectangles in the coordinate system can be determined: rectangle x: x-coordinate ranges from 1 to 3, y-coordinate ranges from 2 to 5. rectangle y: x coordinate ranges from 3 to 5, y coordinate ranges from 3 to 4. Next, reason about the topological relation between two rectangles: (1). The y-coordinate ranges of the two rectangles overlap, but the x-coordinate ranges do not, so it is DC(x, y) or EC(x, y), not the others. (2). The x-coordinate ranges of the two rectangles do not overlap, but are connected, indicating that the two rectangles are externally connected, so it is EC(x, y). Therefore, it is concluded that the two rectangles are EC(x, y). Question - The two geometrical shapes are {shape} that will be given their position by coordinates: {coordinate}. 2. 将具体测试数据的shape、coordinate和relation分别替换模板 中的占位符{shape}; {coordinate}; {relation} 3. 返回生成的EP提示语 |
表1 SRT4LM 3种基础空间关系的定义Tab. 1 Definitions of three spatial relations in SRT4LLM |
| 空间关系 | SRT4LLM对空间关系的定义 |
|---|---|
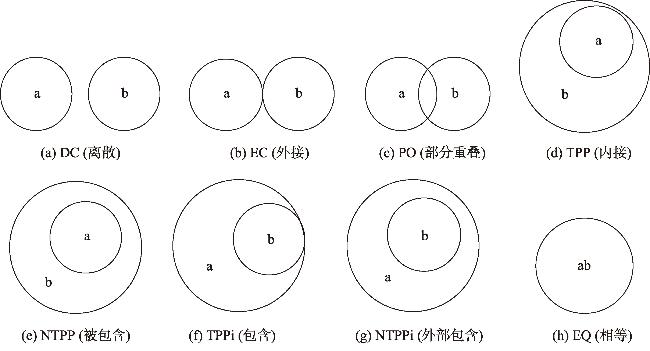
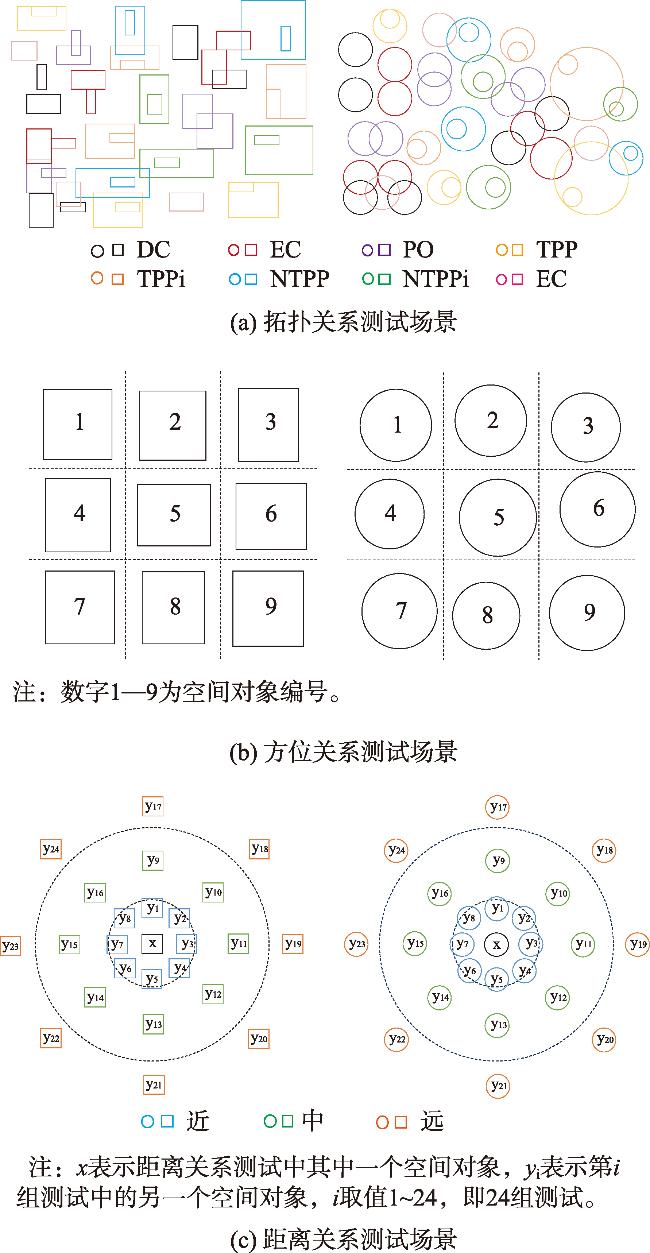
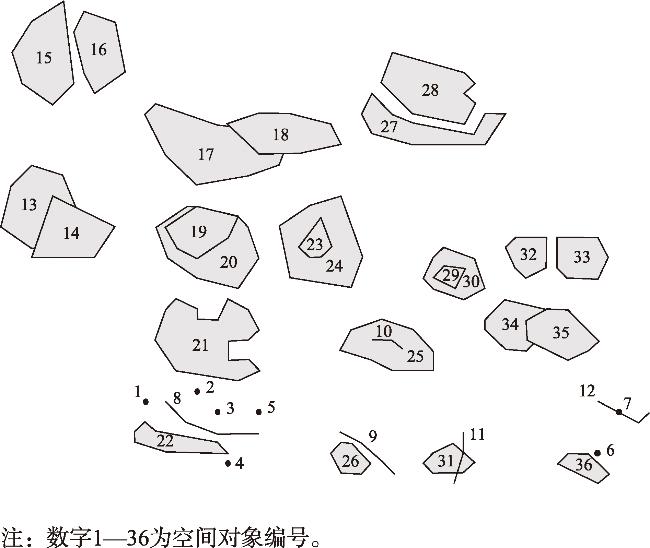
| 拓扑关系 | (1) DC(x, y): x is disconnected from y. (2) EC(x, y): x is externally connected to y without any overlap. (3) PO(x, y): x partially overlaps y, with neither being a part of the other. (4) TPP(x, y): x is a tangential proper part of y. (5) NTPP(x, y): x is a nontangential proper part of y. (6) TPPi(x, y): y is a tangential proper part of x. (7) NTPPi(x, y): y is a nontangential proper part of x. (8) EQ(x, y): x is identical with y. |
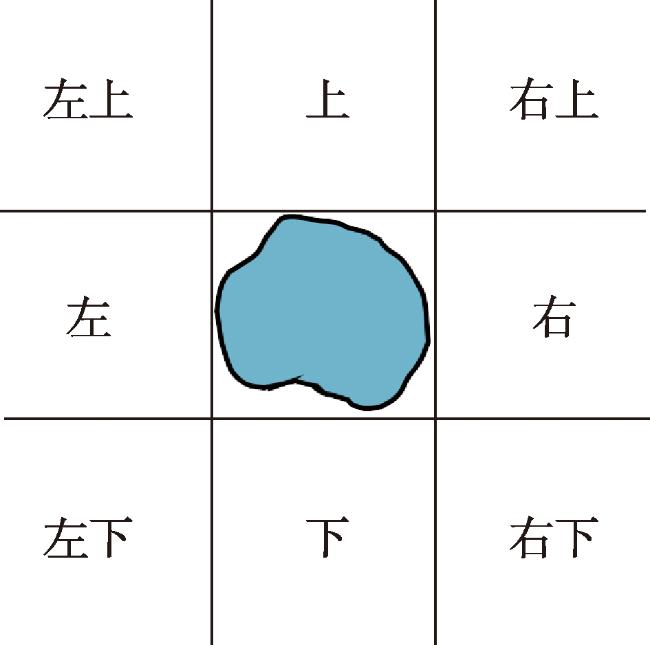
| 方位关系 | (1) Up(x, y): y is roughly above x. (2) Down(x, y): y is roughly below x. (3) Left(x, y): y is roughly to the left of x. (4) Right(x, y): y is roughly to the right of x. (5) Upper Left(x, y): y is roughly to the upper left of x. (6) Lower Left(x, y): y is roughly to the lower left of x. (7) Upper Right(x, y): y is roughly to the upper right of x. (8) Lower Right(x, y): y is roughly to the lower right of x. |
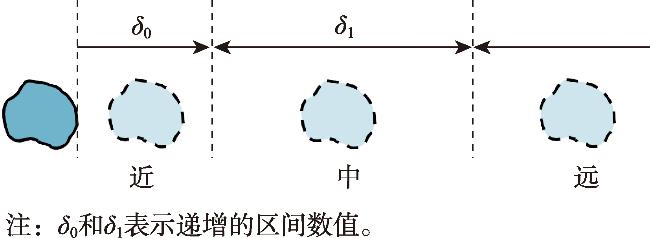
| 距离关系 | Qualitatively describe the relation by delimiting the distance range. (1) Close(x, y): The length of the distance from x to y is [0, δ0]. (2) Medium(x, y): The length of the distance from x to y is (δ0, δ0+δ1]. (3) Far(x, y): The length of the distance from x to y is (δ0+δ1, +∞). |
表2 测试大模型Tab. 2 Tested large language models |
| 大模型名称及版本 | 发布机构 | 发布时间 | 测试版本号 |
|---|---|---|---|
| ChatGLM3 | 智谱AI | 2023年10月27日 | ChatGLM3-6B |
| ERNIE Bot | 百度 | 2023年3月16日 | ERNIE-Bot-turbo-0922 |
| Gemini | 2023年12月6日 | gemini-pro | |
| GPT-3.5 | OpenAI | 2022年11月30日 | gpt-3.5-turbo |
| GPT-4 | OpenAI | 2023年3月15日 | gpt-4-0125-preview |
| LLaMa2 | Meta AI | 2023年7月19日 | LLaMa2-13B-chat |
| QWEN | 阿里云 | 2023年3月16日 | qwen-max |
| SparkDesk | 科大讯飞 | 2023年5月6日 | sparkv3.5 |
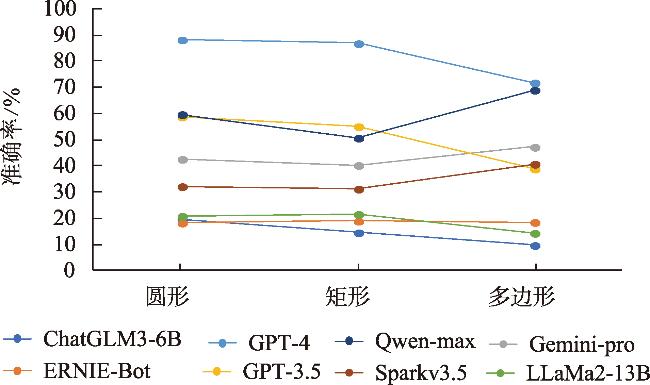
表3 3种空间场景上的测试准确率Tab. 3 Accuracy on three spatial scenes (%) |
| 大模型 | 拓扑关系 | 方位关系 | 距离关系 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 圆形 | 矩形 | 多边形 | 圆形 | 矩形 | 多边形 | 圆形 | 矩形 | 多边形 | |||
| ChatGLM3-6B | 22.2 | 13.9 | 4.2 | 11.8 | 11.8 | 13.9 | 25.0 | 18.0 | 11.1 | ||
| ERNIE-Bot | 9.7 | 16.0 | 8.3 | 10.4 | 10.4 | 18.1 | 34.8 | 30.6 | 29.2 | ||
| Gemini-pro | 38.2 | 25.0 | 45.8 | 38.2 | 37.5 | 40.3 | 51.4 | 58.3 | 55.6 | ||
| GPT-3.5 | 40.3 | 27.8 | 29.2 | 54.2 | 52.1 | 41.7 | 81.9 | 85.4 | 45.8 | ||
| GPT-4 | 78.5 | 72.9 | 63.9 | 87.5 | 95.1 | 72.2 | 98.6 | 92.4 | 79.2 | ||
| LLaMa2-13B | 22.9 | 14.6 | 11.1 | 14.6 | 18.1 | 15.3 | 25.0 | 32.0 | 16.7 | ||
| Qwen-max | 47.2 | 29.2 | 54.2 | 55.5 | 60.4 | 68.1 | 76.4 | 62.5 | 84.7 | ||
| Sparkv3.5 | 27.1 | 29.9 | 44.4 | 38.2 | 31.9 | 27.8 | 31.3 | 32.0 | 50.0 | ||
| 平均值 | 35.8 | 28.6 | 32.6 | 38.8 | 39.7 | 37.2 | 53.0 | 51.4 | 46.5 | ||
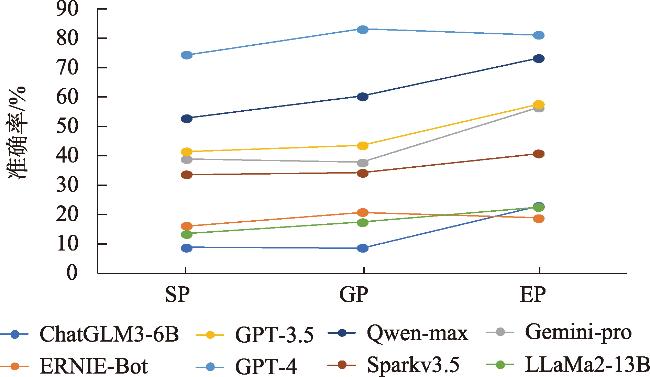
表4 Simple Prompt (SP)、Guiding Prompt (GP)和Example Prompt (EP)策略下的大模型空间认知准确率Tab. 4 Spatial cognitive accuracy of large language models using Simple Prompt (SP), Guiding Prompt (GP), and Example Prompt (EP) (%) |
| 大模型 | 拓扑关系 | 方位关系 | 距离关系 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| SP | GP | EP | SP | GP | EP | SP | GP | EP | |||
| ChatGLM3-6B | 12.0 | 11.5 | 9.9 | 12.0 | 10.4 | 16.1 | 2.1 | 4.2 | 42.7 | ||
| ERNIE-Bot | 8.3 | 13.5 | 9.9 | 14.6 | 11.5 | 16.7 | 25.5 | 37.5 | 29.7 | ||
| Gemini-pro | 36.5 | 36.0 | 43.7 | 26.0 | 33.9 | 57.3 | 54.2 | 43.2 | 68.2 | ||
| GPT-3.5 | 27.1 | 27.6 | 40.1 | 36.5 | 40.6 | 62.0 | 60.9 | 62.5 | 70.9 | ||
| GPT-4 | 63.6 | 72.4 | 73.4 | 73.4 | 87.5 | 84.4 | 86.5 | 89.6 | 85.9 | ||
| LLaMa2-13B | 12.0 | 16.2 | 16.7 | 13.0 | 15.6 | 18.7 | 15.1 | 20.3 | 32.3 | ||
| Qwen-max | 40.1 | 45.3 | 53.1 | 50.5 | 63.6 | 75.0 | 67.7 | 71.9 | 91.7 | ||
| Sparkv3.5 | 37.0 | 35.9 | 36.5 | 21.9 | 23.4 | 49.0 | 42.2 | 43.3 | 37.0 | ||
| 平均值 | 29.6 | 32.3 | 35.4 | 31.0 | 35.8 | 47.4 | 44.3 | 46.6 | 57.3 | ||
注: 3类空间关系中3种Prompt的准确率最高得分用粗体标注,优化后准确率下降的加注下划线。 |
表5 多轮测试结果得分Tab. 5 The result scores of multiple rounds of testing |
| 大模型 | 拓扑关系 | 方位关系 | 距离关系 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 第一轮 | 第二轮 | 第三轮 | 平均值 | 标准差 | 第一轮 | 第二轮 | 第三轮 | 平均值 | 标准差 | 第一轮 | 第二轮 | 第三轮 | 平均值 | 标准差 | |||
| ChatGLM3-6B | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 20.0 | 10.0 | 20.0 | 16.7 | 5.8 | 10.0 | 10.0 | 10.0 | 10.0 | 0.0 | ||
| ERNIE-Bot | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 20.0 | 6.7 | 11.5 | 30.0 | 0.0 | 20.0 | 16.7 | 15.3 | ||
| Gemini-pro | 30.0 | 30.0 | 50.0 | 36.7 | 11.5 | 50.0 | 30.0 | 50.0 | 43.3 | 11.5 | 50.0 | 60.0 | 60.0 | 56.7 | 5.8 | ||
| GPT-3.5 | 20.0 | 40.0 | 10.0 | 23.3 | 15.3 | 30.0 | 30.0 | 20.0 | 26.7 | 5.8 | 30.0 | 50.0 | 30.0 | 36.7 | 11.5 | ||
| GPT-4 | 80.0 | 70.0 | 80.0 | 76.7 | 5.8 | 80.0 | 70.0 | 80.0 | 76.7 | 5.8 | 60.0 | 60.0 | 60.0 | 60.0 | 0.0 | ||
| LLaMa2-13B | 20.0 | 20.0 | 20.0 | 20.0 | 0.0 | 10.0 | 0.0 | 10.0 | 6.7 | 5.8 | 10.0 | 0.0 | 10.0 | 6.7 | 5.8 | ||
| Qwen-max | 60.0 | 60.0 | 70.0 | 63.3 | 5.8 | 70.0 | 60.0 | 60.0 | 63.3 | 5.8 | 60.0 | 60.0 | 60.0 | 60.0 | 0.0 | ||
| Sparkv3.5 | 20.0 | 20.0 | 20.0 | 20.0 | 0.0 | 40.0 | 40.0 | 40.0 | 40.0 | 0.0 | 50.0 | 50.0 | 50.0 | 50.0 | 0.0 | ||
利益冲突: Conflicts of Interest 所有作者声明不存在利益冲突。
All authors disclose no relevant conflicts of interest.
| [1] |
|
| [2] |
陈炫婷, 叶俊杰, 祖璨, 等. GPT系列大语言模型在自然语言处理任务中的鲁棒性[J]. 计算机研究与发展, 2024, 61(5):1128-1142.
[
|
| [3] |
|
| [4] |
陈露, 张思拓, 俞凯. 跨模态语言大模型:进展及展望[J]. 中国科学基金, 2023, 37(5):776-785.
[
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
郭旦怀. 基于空间场景相似性的地理空间分析[M]. 北京: 科学出版社, 2016.
[
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}