
Journal of Geo-information Science >
3D Model Reconstruction of Airborne LiDAR Building Point Clouds Based on Squential Quadratic Programming and Elevation Step Correction
Received date: 2024-02-19
Revised date: 2025-02-28
Online published: 2025-04-23
Supported by
National Natural Science Foundation of China(41871379)
Fundamental Applied Research Foundation of Liaoning Province(2022JH2/101300273)
Fundamental Applied Research Foundation of Liaoning Province(2022JH2/101300257)
Sponsored by Beijing Nova Program(20230484351)
Huzhou Key Research and Development Program(2023ZD2046)
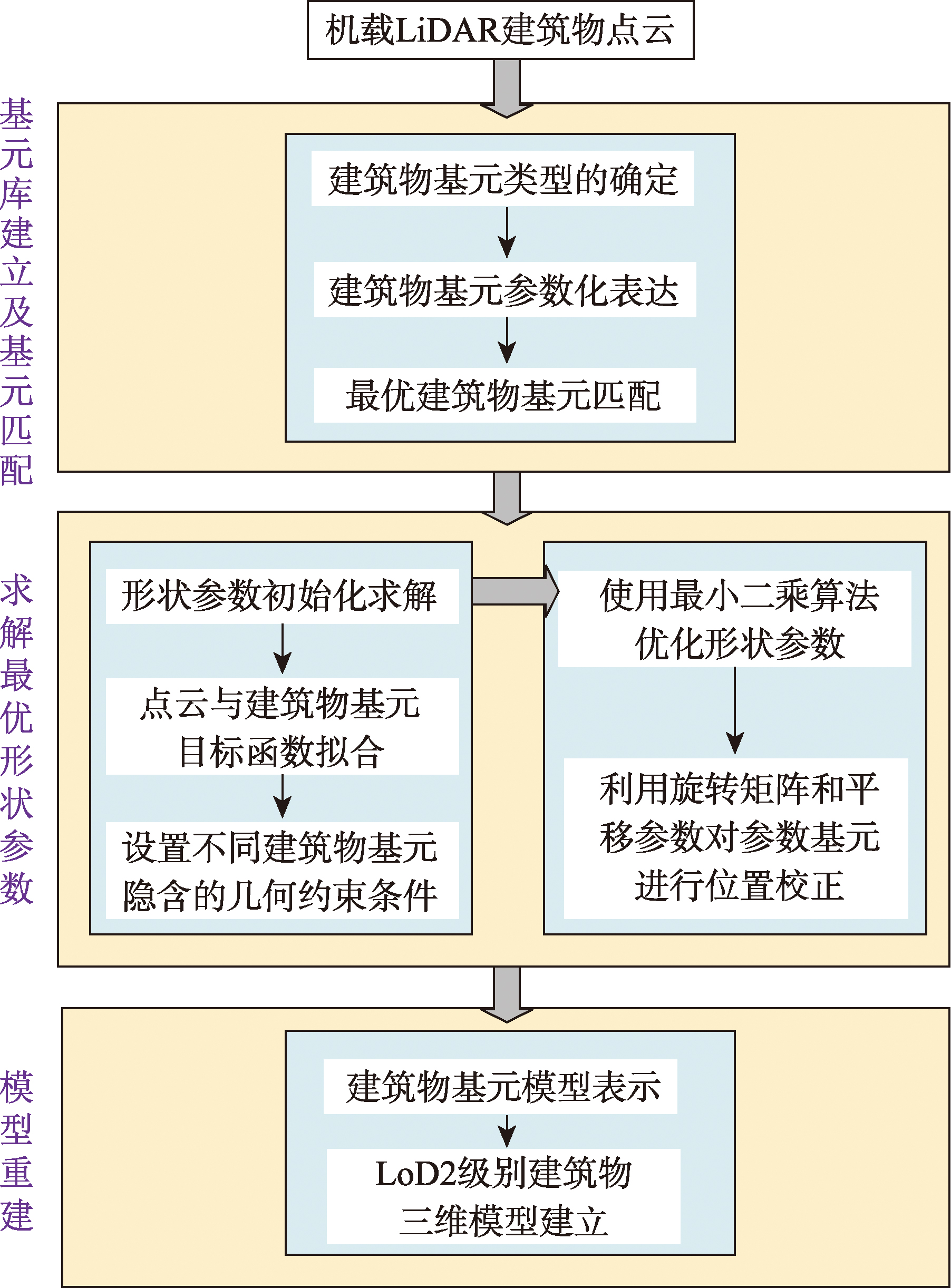
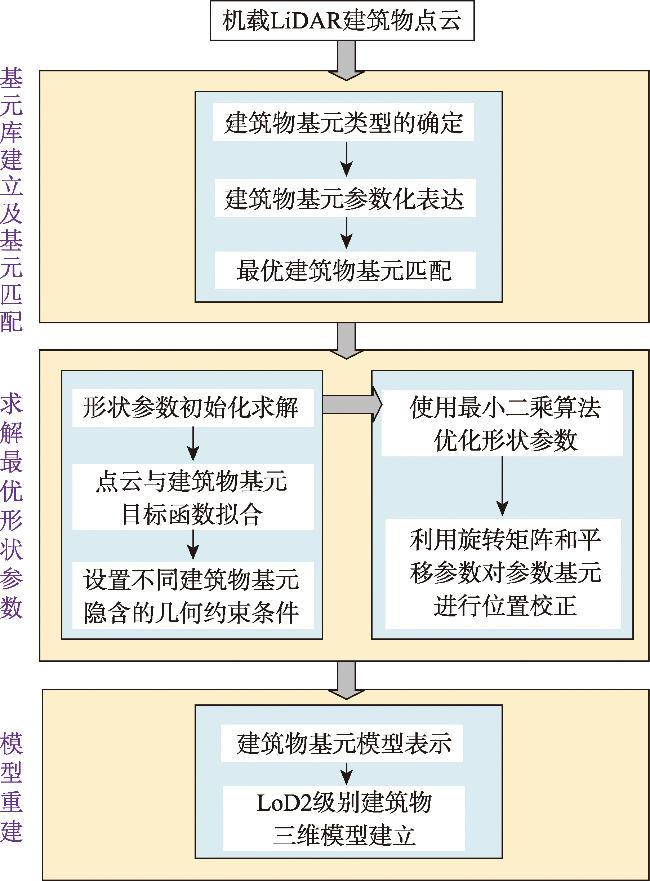
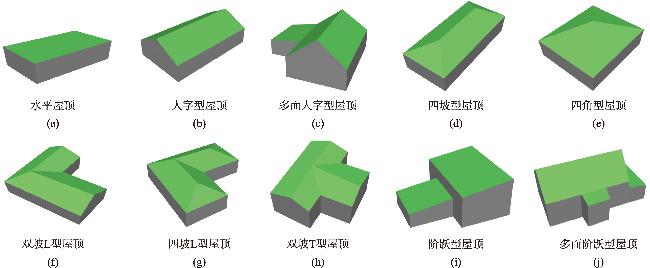
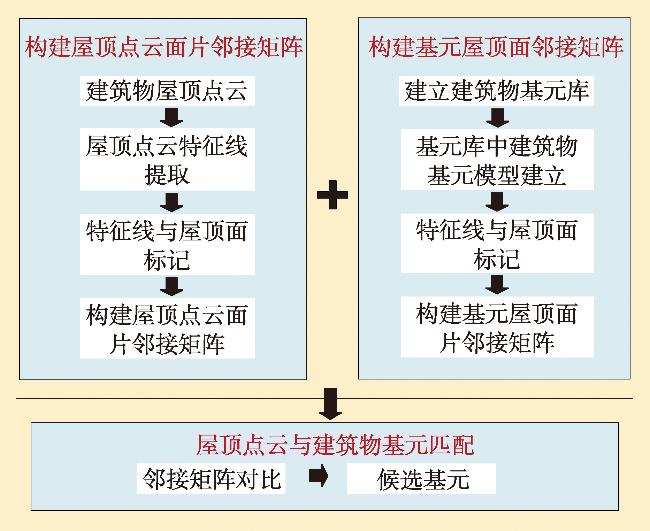
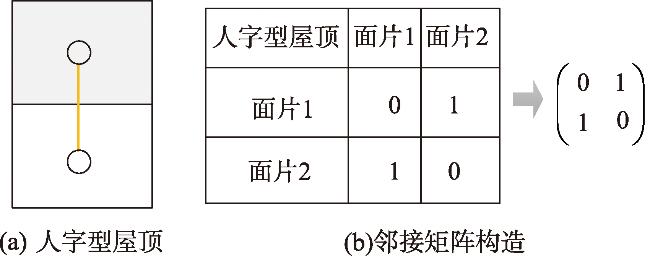
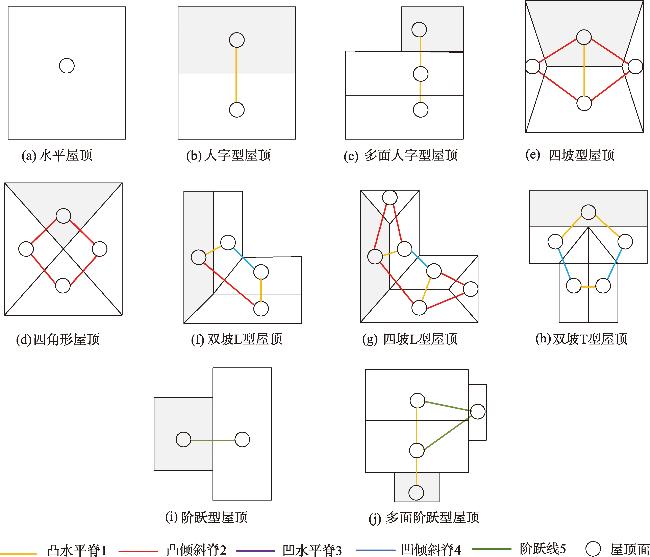
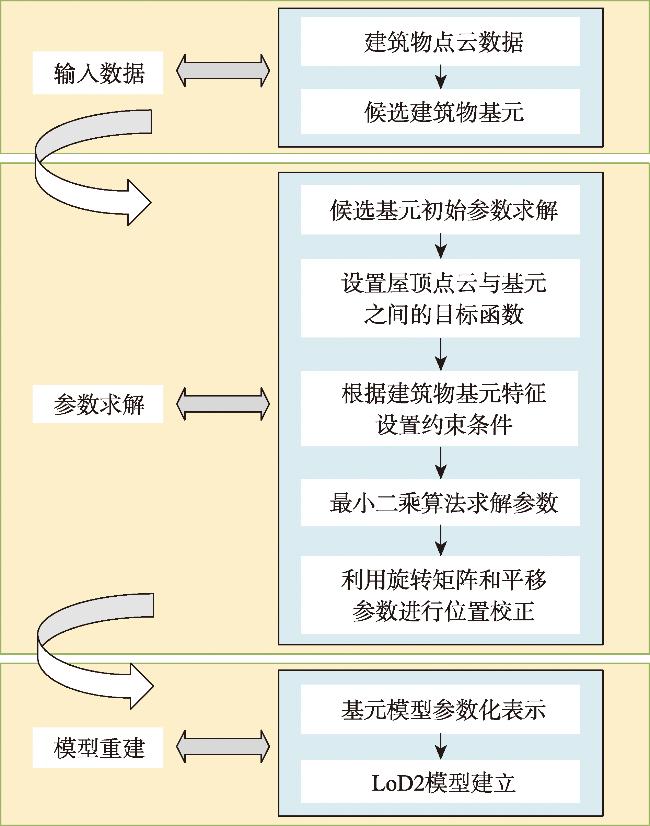
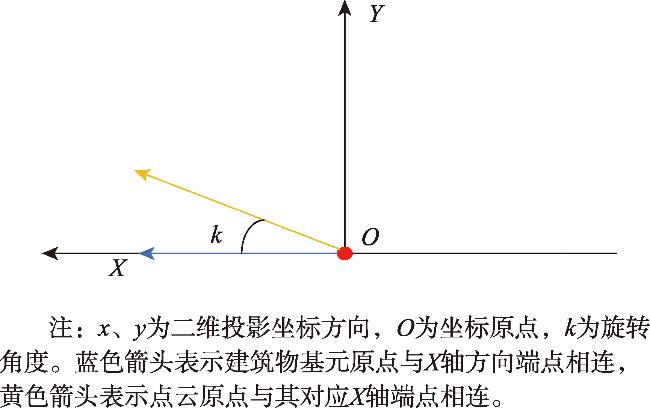
[Objectives] The 3D model reconstruction of buildings based on a model-driven approach using airborne LiDAR building point clouds relies on fitting the building point cloud to predefined geometric primitives. However, due to the uneven density and noise in the building point cloud, errors often arise in structural details during the primitive fitting process, leading to reduced reconstruction accuracy. To address this issue, this study proposes a 3D model reconstruction method for airborne LiDAR building point clouds based on sequential quadratic programming and elevation step correction. [Methods] First, a primitive library containing classical roof structures is established, including simple roofs, complex roofs, and steep roofs. An adjacency matrix is constructed by incorporating the adjacency relationships and ridge properties between roof patches. The best-matching primitives are then selected from the primitive library based on the adjacency matrix. Next, the shape parameters of the selected primitives are optimized using the sequential quadratic programming algorithm to achieve a globally optimal fitting state. The initial 3D model is then generated. To further enhance accuracy, the relative position of the building models and the roof point clouds in 3D space is refined through translation and rotation, reducing the relative distance deviation and improving the fitting precision. Finally, the City Geography Markup Language (CityGML) is used to store the reconstructed 3D building models, ensuring clear structure and correct topology, which facilitates the visual representation of reconstruction results. [Results] Ten sets of classical building point clouds from the 3D Building dataset were selected for the 3D model reconstruction experiment. The proposed method was compared with existing reconstruction approaches based on the same model-driven framework, and classical accuracy evaluation matrics were used for quantitative analysis. The average objective function value for the selected experimental data was 0.32 m, which is 0.03 m higher than the comparison method, indicating improved accuracy. The horizontal average deviation between the reconstructed building elements and the building point cloud was 0.10 m, while the vertical average deviation was 0.04 m. [Conclusions] In summary, the optimal shape parameters, obtained through the sequential quadratic programming algorithm, enable the construction of 3D building models with complete topology and regular shapes. Additionally, the elevation step correction, which utilizes the average point spacing of the roof point cloud as the step length, effectively enhances the reconstruction accuracy of 3D building models.
ZHANG Teng , WANG Jingxue , XIE Xiao , ZANG Dongdong . 3D Model Reconstruction of Airborne LiDAR Building Point Clouds Based on Squential Quadratic Programming and Elevation Step Correction[J]. Journal of Geo-information Science, 2025 , 27(5) : 1163 -1178 . DOI: 10.12082/dqxxkx.2025.240698
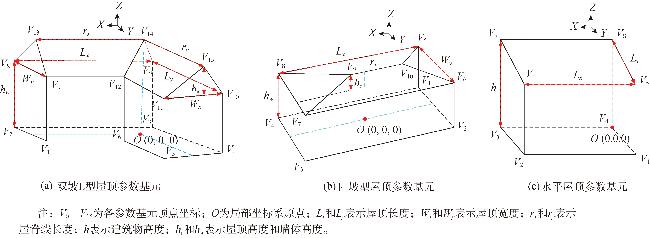
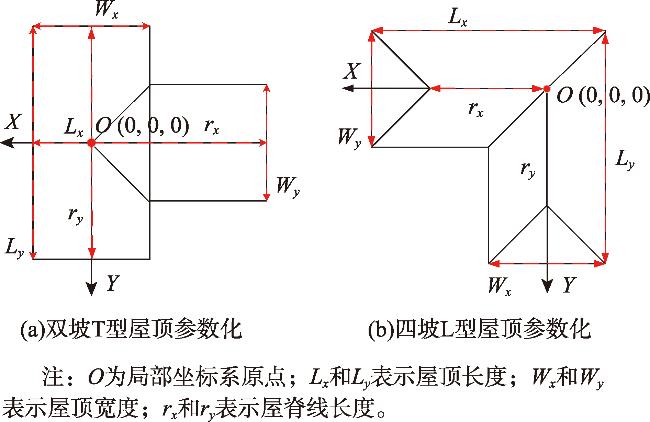
表2 不同建筑物基元形状参数选取Tab. 2 Selection of shape parameters of different building primitives |
| 建筑物基元类型 | 形状参数 |
|---|---|
| 人字型屋顶 | Lx, Ly, rx, h, he, hw |
| 多面人字型屋顶 | Lx, Ly, Wx, Wy, rx, h, he, hw |
| 四坡型屋顶 | Lx, Wy, rx, h, he, hw |
| 四角型屋顶 | Lx, Ly, h, he, hw |
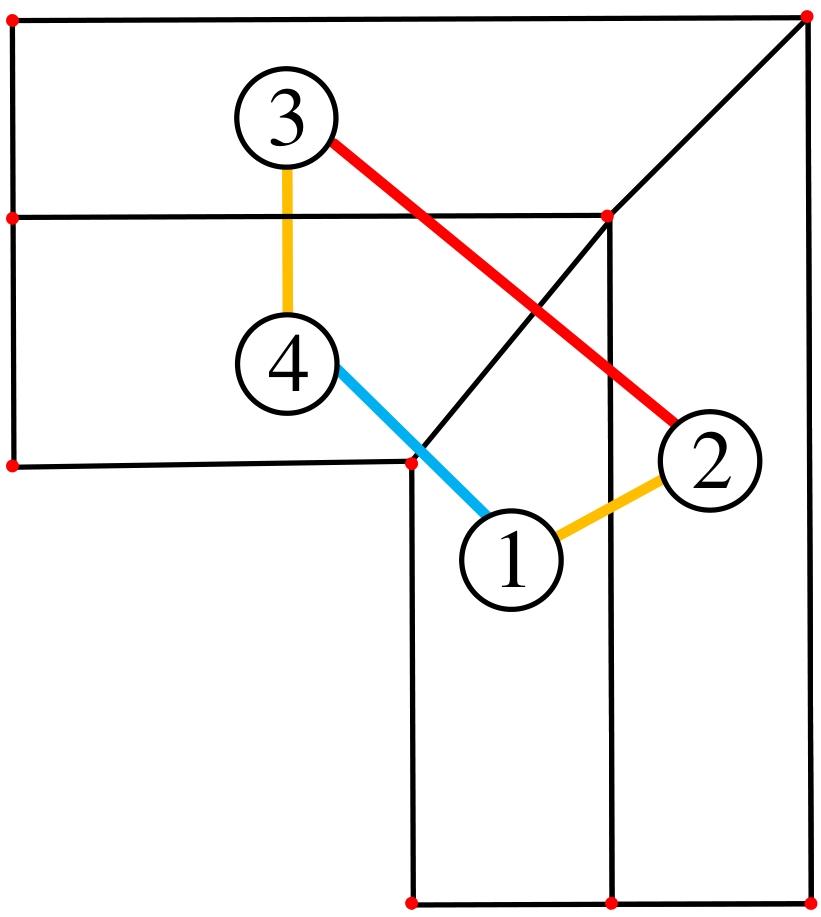
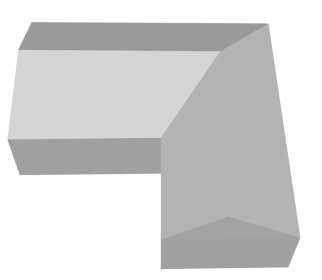
| 四坡L型屋顶 | Lx, Ly, Wx, Wy, rx, ry, h, he, hw |
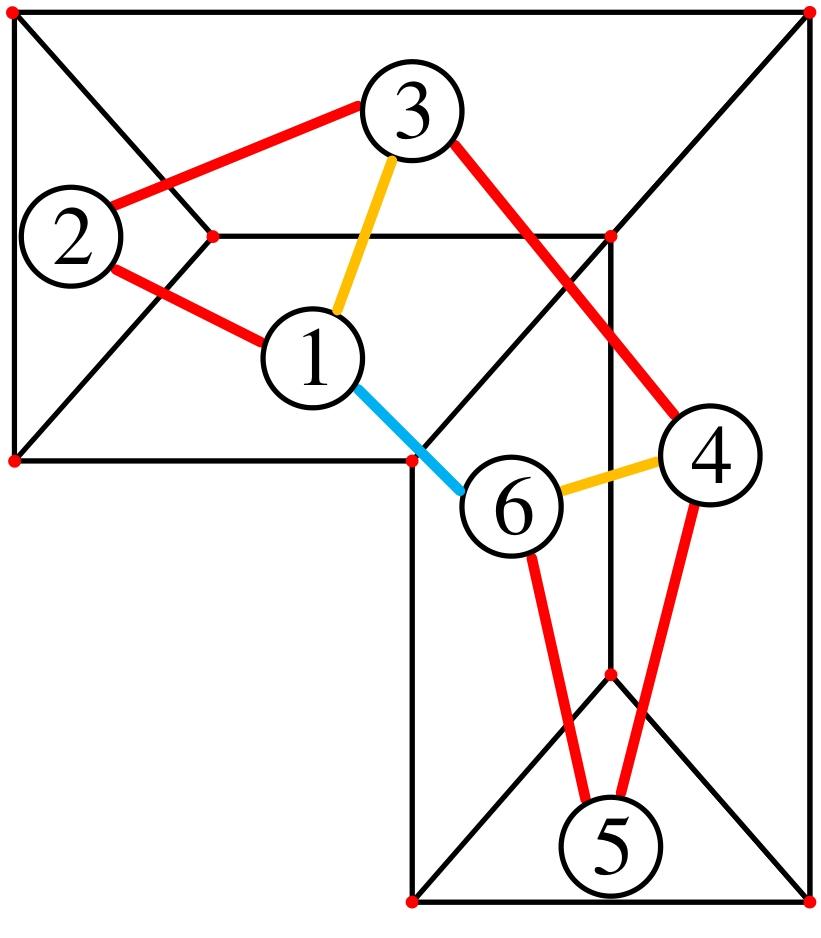
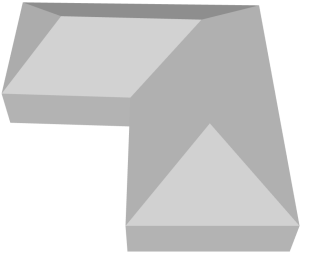
| 双坡T型屋顶 | Lx, Ly, Wx, Wy, rx, ry, h, he, hw |
| 阶跃型屋顶 | Lx, Ly, Wx, Wy, h, he, hw |
| 多面阶跃型屋顶 | Lx, Ly, Wx, Wy, rx, h, he, hw |
表3 基元形状参数初始值Tab. 3 Initial value of the primitive shape parameters |
| 形状参数 | 求解公式 | 形状参数描述 |
|---|---|---|
| LX | Lx=max(x)-max(x) | X轴方向最大值与最小值之差 |
| Ly | Ly=max(y)-max(y) | Y轴方向最大值与最小值之差 |
| Wx | Wx=maxy(x)-miny(x) | 在Y轴方向,求x值最大值与最小值之差 |
| Wy | Wy=maxx(y)-minx(y) | 在X轴方向,求y值最大值与最小值之差 |
| rx | rx=maxz(x) | 取一定数量Z坐标较大点,求x值最大值与最小值之差 |
| ry | ry=maxz(y) | 取一定数量Z坐标较大点,求y值最大值与最小值之差 |
| h | h=max(z)-min(z) | Z轴方向最大值与最小值之差 |
| he | he=max(z)-mid(z) | Z轴方向最大值与中间值之差 |
| hw | hw=mid(z)-min(z) | Z轴方向中间值与最小值之差 |
表5 测试数据集Tab. 5 Test data set |
| 屋顶类型 | 水平屋顶 | 人字型屋顶 | 多面人字型屋顶 | 四坡型屋顶 | 四角型屋顶 |
|---|---|---|---|---|---|
| 建筑物点云 |  |  |  | 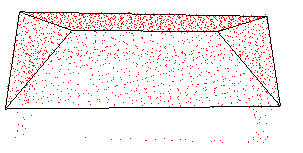 | 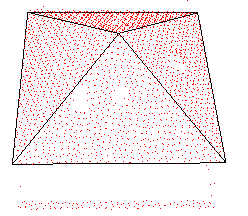 |
| 屋顶类型 | 双坡L型屋顶 | 四坡L型屋顶 | 双坡T型屋顶 | 阶跃型屋顶 | 多面阶跃型屋顶 |
| 建筑物点云 | 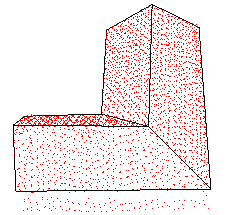 | 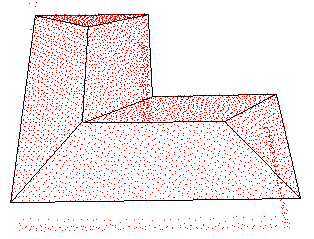 |  |  |  |
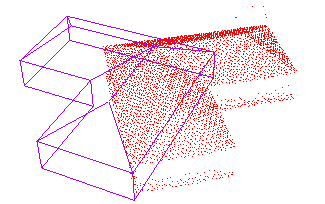
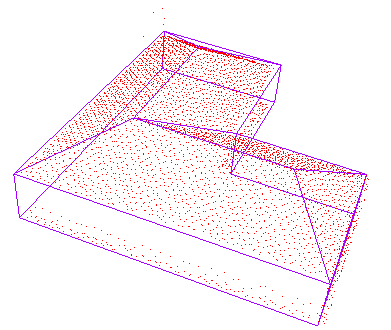
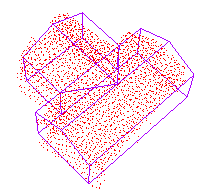
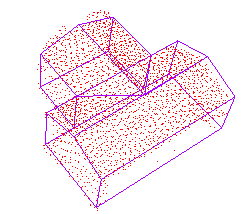
表6 建筑物点云与对应基元模型拟合效果Tab. 6 The fitting effect of the building point cloud and corresponding primitive model |
| 屋顶类型 | 点云数据 | 设置约束条件前 | 设置约束条件后 |
|---|---|---|---|
| 双坡L型屋顶 |  | 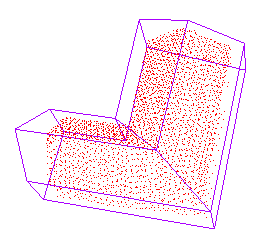 | 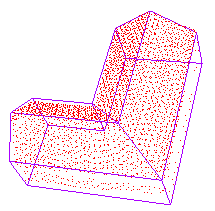 |
| 四坡L型屋顶 | 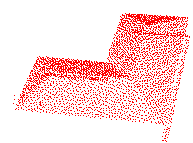 | 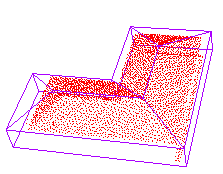 |  |
| 双坡T型屋顶 |  |  |  |
| 阶跃型屋顶 | 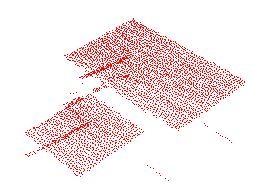 | 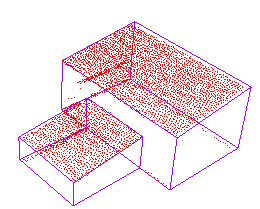 | 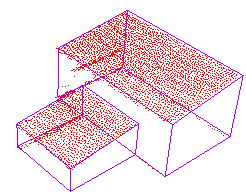 |
表7 建筑物模型重建结果Tab. 7 Results of building model reconstruction |
| 屋顶类型 | 水平屋顶 | 人字型屋顶 | 多面人字型屋顶 | 四坡型屋顶 | 四角型屋顶 |
|---|---|---|---|---|---|
| 模型重建结果 | 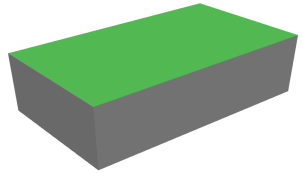 | 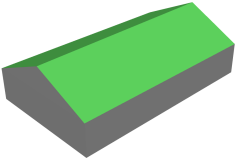 | 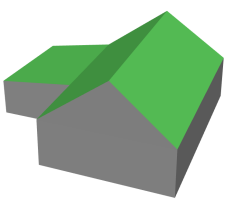 | 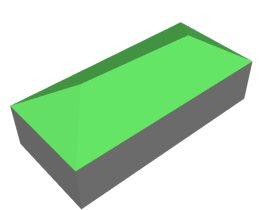 | 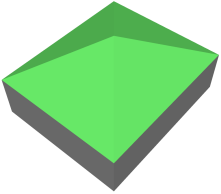 |
| 屋顶类型 | 双坡L型屋顶 | 四坡L型屋顶 | 双坡T型屋顶 | 阶跃型屋顶 | 多面阶跃型屋顶 |
| 模型重建结果 |  | 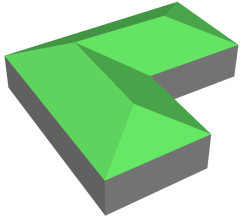 | 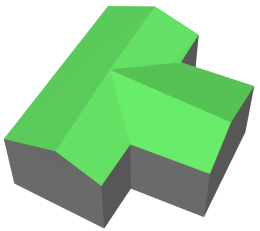 | 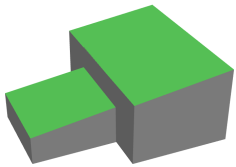 | 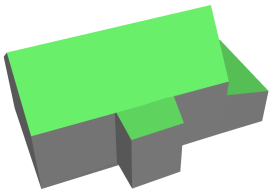 |
表8 各建筑物三维重建精度统计Tab. 8 Statistics of building 3D reconstruction accuracy |
| 屋顶类型 | 建筑物点云 | 邻接矩阵匹配 | 目标函数平均值/m | |
|---|---|---|---|---|
| 文献[24]方法 | 本文方法 | |||
| 水平屋顶 |  | 0.002 | 0.002 | |
| 人字型屋顶 |  | 0.570 | 0.540 | |
| 多面人字型屋顶 |  | 0.440 | 0.410 | |
| 四角型屋顶 |  | 0.700 | 0.670 | |
| 四坡型屋顶 |  | 0.200 | 0.180 | |
| 双坡L型屋顶 |  | 0.430 | 0.400 | |
| 四坡L型屋顶 |  | 0.380 | 0.340 | |
| 双坡T型屋顶 |  | 0.070 | 0.060 | |
| 阶跃型屋顶 | 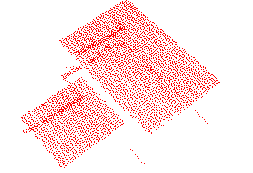 | 0.230 | 0.210 | |
| 多面阶跃型屋顶 | 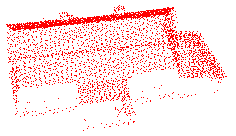 | 0.410 | 0.390 | |
表9 屋脊线准确性分析Tab. 9 Accurate analysis of the ridge line |
| 屋顶类型 | 参考数据 | 设置约束条件前 | 设置约束条件后 |
|---|---|---|---|
| 四坡型屋顶 | 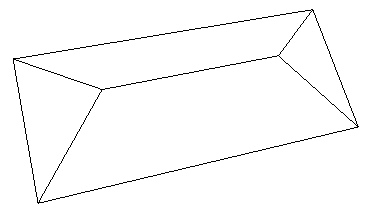 | 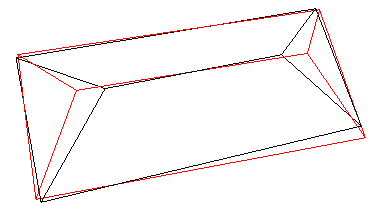 | 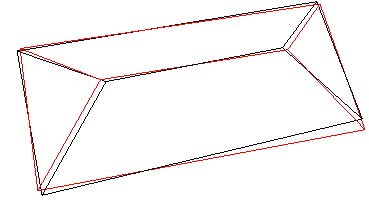 |
| 多面人字型屋顶 | 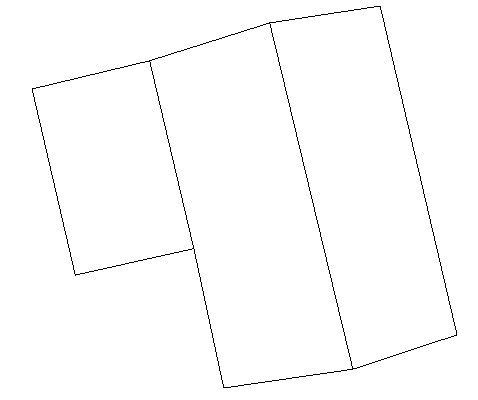 | 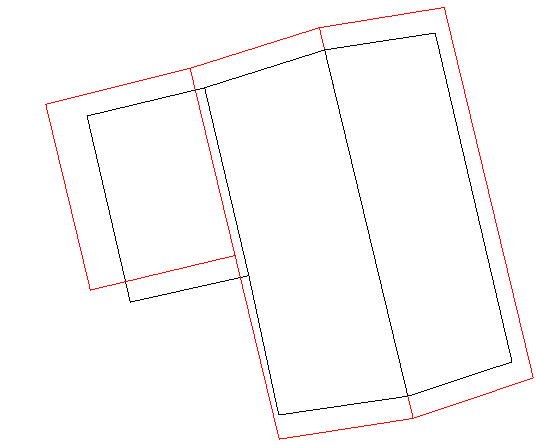 | 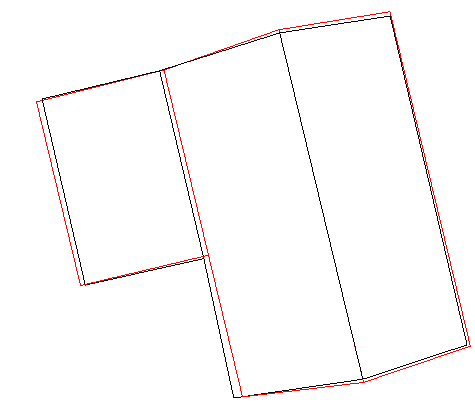 |
| 双坡L型屋顶 | 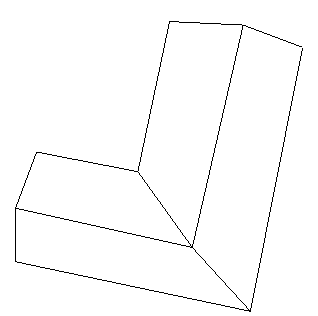 | 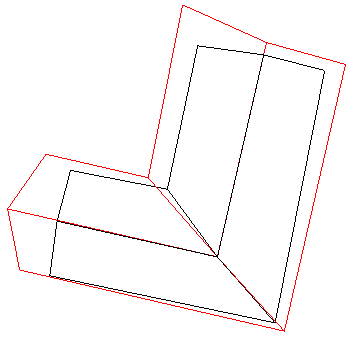 | 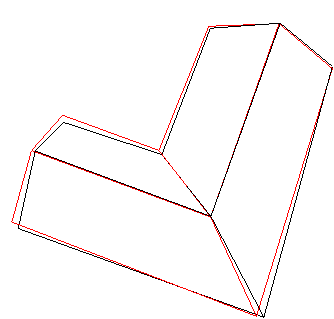 |
| 四坡L型屋顶 | 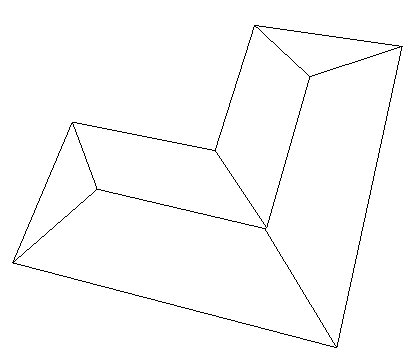 | 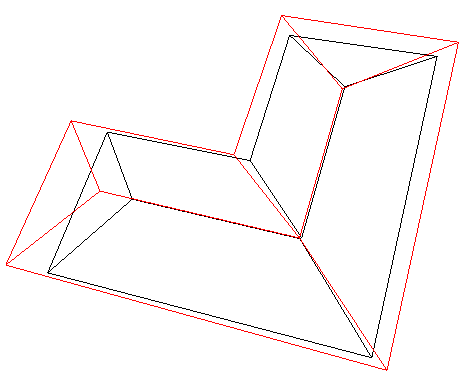 | 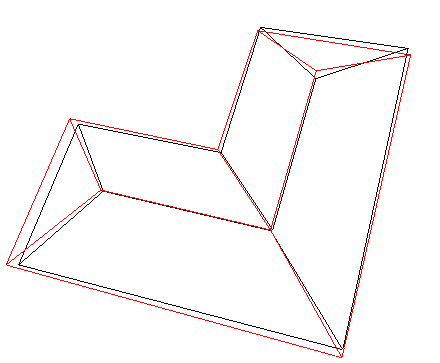 |
注:表中黑色线框为屋顶参考特征线,红色线框为建筑物基元模型特征线。 |
表10 建筑物三维模型重建偏差量Tab. 10 Deviation of building 3D model reconstruction |
| 屋顶类型 | 水平偏差/m | 竖直偏差/m |
|---|---|---|
| 水平屋顶 | 0.06 | 0.01 |
| 人字型屋顶 | 0.04 | 0.05 |
| 多面人字型屋顶 | 0.03 | 0.06 |
| 四角型屋顶 | 0.28 | 0.04 |
| 四坡型屋顶 | 0.04 | 0.02 |
| 双坡L型屋顶 | 0.04 | 0.08 |
| 四坡L型屋顶 | 0.17 | 0.06 |
| 双坡T型屋顶 | 0.06 | 0.03 |
| 阶跃型屋顶 | 0.05 | 0.01 |
| 多面阶跃型屋顶 | 0.25 | 0.02 |
利益冲突: Conflicts of Interest 所有作者声明不存在利益冲突。
All authors disclose no relevant conflcts of interest.
| [1] |
程亮, 龚健雅, 韩文泉. LiDAR与影像集成的真实感建筑物三维重建研究进展[J]. 测绘科学, 2009, 34(1):21-24.
[
|
| [2] |
|
| [3] |
钟国文. 机载LiDAR在地质灾害应急测绘中的应用研究[J]. 测绘与空间地理信息, 2023, 46(4):197-200.
[
|
| [4] |
文学东, 陈为民, 谢洪, 等. 一种融合多源特征的建筑物三维模型重建方法[J]. 武汉大学学报(信息科学版), 2019, 44(5):731-736,764.
[
|
| [5] |
杨必胜, 梁福逊, 黄荣刚. 三维激光扫描点云数据处理研究进展、挑战与趋势[J]. 测绘学报, 2017, 46(10):1509-1516.
[
|
| [6] |
杜建丽, 陈动, 张振鑫, 等. 建筑点云几何模型重建方法研究进展[J]. 遥感学报, 2019, 23(3):374-391.
[
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
刘德强, 曾力, 吴光星, 等. 区域增长与RANSAC模型结合的机载点云平面分割方法[J]. 建筑技术, 2024, 55(8):1020-1024.
[
|
| [16] |
洪绍轩, 袁枫, 王竞雪, 等. 机载LiDAR点云建筑物边界线规则化算法研究[J]. 测绘科学, 2020, 45(7):100-105,125.
[
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
张文元, 陈江媛, 谈国新. 基于3D基元拟合的复杂屋顶点云三维重建[J]. 地球信息科学学报, 2023, 25(8):1531-1545.
[
|
| [25] |
|
| [26] |
|
| [27] |
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}