
Journal of Geo-information Science >
From Specialized Trajectory Models to Trajectory Foundation Models: Advancements and Prospects
Received date: 2025-04-25
Revised date: 2025-06-27
Online published: 2025-07-07
Supported by
National Natural Science Foundation of China(42271474)
Guangdong Basic and Applied Basic Research Foundation(2024A1515012020)
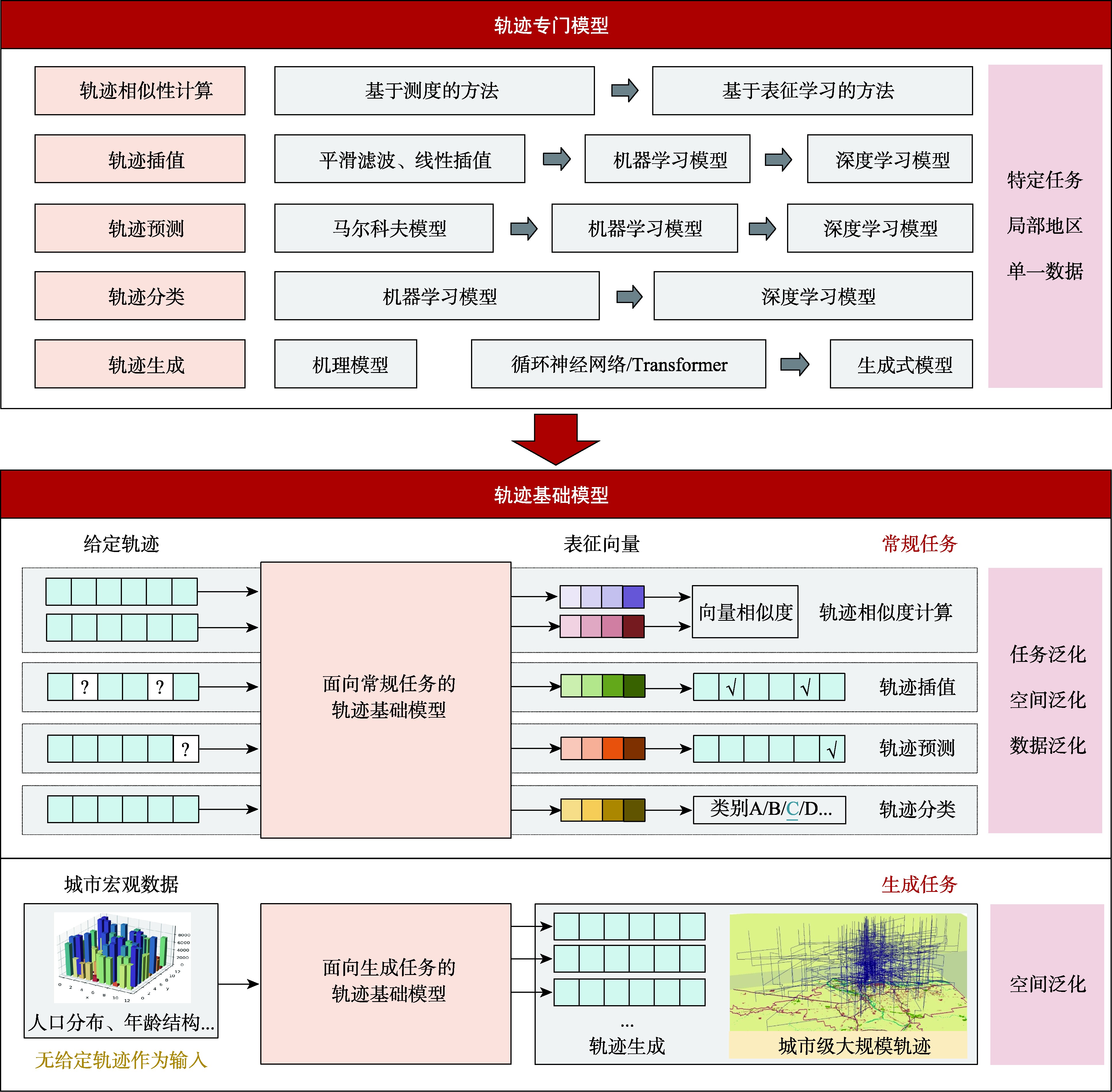
[Significance] Human mobility is closely tied to transportation, infectious disease spread, and public safety, making trajectory analysis and modeling a long-standing research focus. While numerous specialized trajectory models, such as interpolation, prediction, and classification models, have been developed using machine learning or deep learning, most are task-specific and trained on localized datasets, limiting their generalizability across tasks, regions, or trajectory data. Recent advances in generative AI have demonstrated the potential of foundation models in NLP and computer vision, motivating the need for a trajectory foundation model capable of learning universal patterns from large-scale mobility data to support diverse downstream applications. [Methods] This paper first reviews the research progress of various specialized trajectory models. It then categorizes trajectory modeling tasks into conventional tasks (e.g., trajectory similarity computation, interpolation, prediction, and classification) and generation task (i.e., trajectory generation), and elaborates on recent advances in trajectory foundation models for these two types of tasks. [Conclusions] The paper argues that trajectory foundation models for conventional tasks should enhance not only task generalization but also spatial and data generalization. Trajectory foundation models for generation task must address the challenge of spatial generalization, enabling the generation of large-scale trajectory data "from scratch" based on easily obtainable macro-level urban data or features. Furthermore, integrating trajectory data with other data types (e.g., text, maps, and other geospatial data) to construct multimodal geographic foundation models, as well as developing application-oriented trajectory foundation models for fields such as transportation, public health, and public safety, are promising research directions worthy of future exploration.
LIU Kang . From Specialized Trajectory Models to Trajectory Foundation Models: Advancements and Prospects[J]. Journal of Geo-information Science, 2025 , 27(7) : 1520 -1531 . DOI: 10.12082/dqxxkx.2025.250196
表1 面向常规任务的轨迹基础模型Tab. 1 Trajectory foundation models for conventional tasks |
| 模型 | 时间/年 | 数据类型 | “基础”之处 | 任务泛化 | 空间泛化 | 数据泛化 |
|---|---|---|---|---|---|---|
| Trembr[61] | 2020 | 车辆轨迹 | 可用于多种下游任务 | √ | × | × |
| Toast[62] | 2021 | 车辆轨迹 | 可用于多种下游任务 | √ | × | × |
| START[63] | 2023 | 车辆轨迹 | 可用于多种下游任务 | √ | × | × |
| JGRM[64] | 2024 | 车辆轨迹 | 可用于多种下游任务 | √ | × | × |
| LTM[71] | 2023 | 签到轨迹 | 可用于多种下游任务 空间范围大:日本 数据量大:600万条用户轨迹 模型大:BERT | √ | × | × |
| TrajFM[72] | 2024 | 车辆轨迹 | 可用于多种下游任务 可跨区域迁移 | √ | √ | × |
| UniTraj[73] | 2024 | 车辆轨迹 | 可用于多种下游任务 空间范围大:涉及70个国家 | √ | √ | × |
注:本文通过模型原理、实验数据和实验验证充分性评估模型的任务泛化、空间泛化与数据泛化能力。 |
表2 面向生成任务的轨迹基础模型Tab.2 Trajectory foundation models for generation task |
| 文献 | 时间/年 | 数据类型 | “基础”之处 | 空间泛化 |
|---|---|---|---|---|
| Mizuno等[74] | 2022 | 手机定位轨迹 | 空间范围大:日本 数据量大:840万条轨迹 模型大:GPT-2 SMALL | × |
| Horikomi等[75] | 2023 | 手机定位轨迹 | 空间范围大:日本 模型大:GPT-2 SMALL | × |
| Zhu等[76] | 2024 | 车辆轨迹 | 可给定路径作为条件,生成相应轨迹,从而能够跨城市应用 | × |
| Wang等[77] | 2025 | 车辆轨迹 | 以源城市路网和轨迹数据以及目标城市路网训练模型,可跨城市实现目标城市的轨迹生成 | × |
注:本文通过判断模型能否“基于任意目标城市的宏观数据/少量参数/随机采样噪声‘从无到有’生成大规模合成轨迹数据集”来评估模型的空间泛化能力。 |
利益冲突:Conflicts of Interest 所有作者声明不存在利益冲突。
All authors disclose no relevant conflicts of interest.
| [1] |
李锐, 刘朝辉, 吴华意. 城市人口流动感知与建模方法综述[J]. 武汉大学学报(信息科学版), 2025, 50(5):973-995.
[
|
| [2] |
方志祥. 公共卫生与安全应急视角下人群动态的观测思考与挑战[J]. 武汉大学学报(信息科学版), 2020, 45(12):1847-1856.
[
|
| [3] |
关庆锋, 任书良, 姚尧, 等. 耦合手机信令数据和房价数据的城市不同经济水平人群行为活动模式研究[J]. 地球信息科学学报, 2020, 22(1):100-112.
[
|
| [4] |
姚尧, 张亚涛, 关庆锋, 等. 使用时序出租车轨迹识别多层次城市功能结构[J]. 武汉大学学报(信息科学版), 2019, 44(6):875-884.
[
|
| [5] |
牟乃夏, 张恒才, 陈洁, 等. 轨迹数据挖掘城市应用研究综述[J]. 地球信息科学学报, 2015, 17(10):1136-1142.
[
|
| [6] |
唐炉亮, 阚子涵, 任畅, 等. 利用GPS轨迹的转向级交通拥堵精细分析[J]. 测绘学报, 2019, 48(1):75-85.
[
|
| [7] |
裴韬, 王席, 宋辞, 等. COVID-19疫情时空分析与建模研究进展[J]. 地球信息科学学报, 2021, 23(2):188-210.
[
|
| [8] |
尹凌, 刘康, 张浩, 等. 耦合人群移动的COVID-19传染病模型研究进展[J]. 地球信息科学学报, 2021, 23(11):1894-1909.
[
|
| [9] |
|
| [10] |
陆锋, 刘康, 陈洁. 大数据时代的人类移动性研究[J]. 地球信息科学学报, 2014, 16(5):665-672.
[
|
| [11] |
刘瑜, 肖昱, 高松, 等. 基于位置感知设备的人类移动研究综述[J]. 地理与地理信息科学, 2011, 27(4):8-13.
[
|
| [12] |
|
| [13] |
|
| [14] |
秦昆, 王玉龙, 赵鹏祥, 等. 行为轨迹时空聚类与分析[J]. 自然杂志, 2018, 40(3):177-182.
[
|
| [15] |
刘康. 人类移动数据生成方法:研究进展与趋势探讨[J]. 地球信息科学学报, 2024, 26(4):831-847.
[
|
| [16] |
周星星, 吉根林, 张书亮. 时空轨迹相似性度量方法综述[J]. 地理信息世界, 2018, 25(4):11-18.
[
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
吴晨昊, 向隆刚, 张叶廷, 等. 基于地理空间感知型表征学习的轨迹相似度计算[J]. 测绘学报, 2023, 52(4):670-678.
[
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|
| [59] |
|
| [60] |
|
| [61] |
|
| [62] |
|
| [63] |
|
| [64] |
|
| [65] |
|
| [66] |
|
| [67] |
|
| [68] |
|
| [69] |
|
| [70] |
|
| [71] |
|
| [72] |
|
| [73] |
|
| [74] |
|
| [75] |
|
| [76] |
|
| [77] |
|
| [78] |
刘康, 段滢滢, 张恒才. 基于路网拓扑层次性表达的驾车路径规划方法[J]. 地球信息科学学报, 2015, 17(9):1039-1046.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}