交通运输部等七部门联合印发《智能航运发展指导意见》
1
2019
... 随着船载AIS设备的普及和数据接收存储的便捷,积累了海量的船舶AIS数据,基于AIS数据的船舶行为特征挖掘与预测研究成为了国内外水上交通工程领域的研究热点.船舶AIS数据中包括的船舶动态信息、静态信息和航次相关的信息蕴含了船舶行为模式的时空分布、船舶操纵行为特征、船舶交通流特征和船舶习惯航路分布特征.如何运用地理数据挖掘和机器学习的方法对特征进行挖掘分析,发现船舶AIS数据背后隐藏的潜在的船舶行为知识和规律,可以为《智能航运发展指导意见》[1]背景下的智能船舶、智能航保、智能航运监管等研究提供重要的理论支撑. ...
交通运输部等七部门联合印发《智能航运发展指导意见》
1
2019
... 随着船载AIS设备的普及和数据接收存储的便捷,积累了海量的船舶AIS数据,基于AIS数据的船舶行为特征挖掘与预测研究成为了国内外水上交通工程领域的研究热点.船舶AIS数据中包括的船舶动态信息、静态信息和航次相关的信息蕴含了船舶行为模式的时空分布、船舶操纵行为特征、船舶交通流特征和船舶习惯航路分布特征.如何运用地理数据挖掘和机器学习的方法对特征进行挖掘分析,发现船舶AIS数据背后隐藏的潜在的船舶行为知识和规律,可以为《智能航运发展指导意见》[1]背景下的智能船舶、智能航保、智能航运监管等研究提供重要的理论支撑. ...
船舶自动识别系统数据修复和预测算法研究
1
2019
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
船舶自动识别系统数据修复和预测算法研究
1
2019
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
基于高斯混合模型的船舶到达规律研究
1
2020
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
基于高斯混合模型的船舶到达规律研究
1
2020
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
基于AIS数据的交汇水域船舶会遇态势辨识
2
2021
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于AIS数据的交汇水域船舶会遇态势辨识
2
2021
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
Data mining approach for automatic ship-route design for coastal seas using AIS trajectory clustering analysis
2
2021
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
A novel MP-LSTM method for ship trajectory prediction based on AIS data
1
2021
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
Ship collision avoidance methods: State-of-the-art
1
2020
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
船舶避碰系统研究综述
1
2019
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
船舶避碰系统研究综述
1
2019
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
船舶轨迹异常检测方法研究进展
1
2017
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
船舶轨迹异常检测方法研究进展
1
2017
... 沿海、港口和内河水域的船舶交通密度大、态势复杂,船舶交通面临较高的航行和碰撞风险,发生水上交通事故会造成巨大的人命财产损失和海洋环境污染.在AIS数据所包含的水上交通信息的基础上,运用数据驱动和人工智能理论开展船舶行为特征挖掘和预测的系列研究,对提高水上交通监管效率和降低交通风险有重要意义.当前在水上交通研究领域已经开展了大量的基于AIS数据的船舶航迹数据修复预测[2]、船舶交通参数建模[3]、船舶会遇[4]、船舶航迹聚类[5]和船舶行为预测[6]等研究,取得了较丰硕的研究成果.当前已有学者梳理了关于基于AIS数据的船舶碰撞风险[7]、船舶避碰系统[8]和船舶异常行为检测[9]等方面的研究综述,然而在基于AIS数据的船舶行为特征分析、聚类和预测方面的研究进展仍有待系统地梳理总结和全面客观地分析.因此本文在运用文献计量可视化对船舶行为特征挖掘与预测研究的相关论文进行检索分析的基础上,对基于AIS数据的水上交通要素挖掘、船舶行为聚类和船舶行为预测等研究主题开展详细的综述分析,以期为智能航运背景下的船舶行为特征挖掘和预测领域的深入研究提供参考. ...
Software survey:VOSviewer.A computer program for bibliometric mapping
1
2010
... 基于WOS的116篇英文文献和CNKI的114篇中文文献,运用Vosviewer软件[10]从文献计量学的角度生成研究内容的高频关键词的聚类图谱和趋势演化图谱,对2010—2020年的船舶行为特征挖掘与预测研究热点进行了可视化分析. ...
Vessel track distribution algorithm based on AIS
2
2012
... (1)航迹清洗.航迹数据清洗方法主要是在存储AIS航迹的数据库中,通过数据查询方法删除MMSI为0和经、纬度数值超过阈值范围、具有明显错误的数据和异常数据[11],航迹数据的清洗可以保证后续数据挖掘和计算的准确性. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
Vessel track distribution algorithm based on AIS
2
2012
... (1)航迹清洗.航迹数据清洗方法主要是在存储AIS航迹的数据库中,通过数据查询方法删除MMSI为0和经、纬度数值超过阈值范围、具有明显错误的数据和异常数据[11],航迹数据的清洗可以保证后续数据挖掘和计算的准确性. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于轨迹大数据的船舶类型自动识别方法研究
2
2021
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于轨迹大数据的船舶类型自动识别方法研究
2
2021
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
三次样条插值在船舶轨迹修复中的研究
2
2016
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
三次样条插值在船舶轨迹修复中的研究
2
2016
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
AIS基站系统中的数据解析与压缩
2
2014
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
AIS基站系统中的数据解析与压缩
2
2014
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
一种船舶运动状态插值算法
2
2015
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
一种船舶运动状态插值算法
2
2015
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于Vondrak滤波和三次样条插值的船舶轨迹修复研究
2
2015
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于Vondrak滤波和三次样条插值的船舶轨迹修复研究
2
2015
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
A novel ship trajectory reconstruction approach using AIS data
2
2018
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
Improved kinematic interpolation for AIS trajectory reconstruction
2
2021
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于机器学习的船舶AIS轨迹预测方法研究
2
2020
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于机器学习的船舶AIS轨迹预测方法研究
2
2020
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
一种考虑船舶航速航向的AIS航迹插值方法
2
2015
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
一种考虑船舶航速航向的AIS航迹插值方法
2
2015
... (2)航迹插值.在一些特殊情况下,船舶AIS设备发生故障导致接受设备无法准确接收完整船舶的航迹信息,因此需要对缺失的船舶轨迹插值补全,以获取完整的航迹表达.从船舶轨迹插值研究方法的发展角度分析,船舶航迹数据插值的方法从单一方法的插值发展到复合方法的插值和基于机器学习的插值方法.单一方法的插值包括:线性插值方法[12]、三次样条插值[13]、拉格朗日插值方法[14]、均值插值方法和向量函数的插值方法[15].复合插值方法是在单一方法的基础上考虑船舶轨迹的特性和航行场景特征(如Vondark滤波[16]、船舶导航状态估计和船舶轨迹拟合[17]、船舶运动学建模[18]等方法)进行插值和轨迹修复,获得了更加完整的船舶行为轨迹数据.基于机器学习的插值方法主要是通过神经网络、牛顿搜索算法、支持向量机的方法对船舶轨迹进行插值[19],在考虑插值船舶轨迹数据的速度和航向特征的基础上,对插值时间段内的船舶位置进行动力学预测,最长可以实现端点间33min时间差的航迹插值[20]. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
雷达与AIS数据融合算法研究
1
2017
... (3)航迹融合.船舶AIS设备在甚高频(Very High Frequency, VHF)频段内采用自组织时分多址接入(Self-organized Time Division Multiple Access,SOTDMA)技术自动收发船舶静动态信息,根据船舶的航行状态和速度的大小的不同,数据的接发间隔为2s~3min,AIS表征的船舶航迹是非等间距的离散特征点,同时AIS数据还可以反映船舶类型、尺度、目的港和预计到达时间等船舶自身和航行相关的参数.沿海、内河和港口水域安装的海事雷达可以主动探测获得监控水域内的船舶方位、距离数据,雷达数据包含了船舶形状、大小和水域的全景交通图像的特点[21],船舶AIS数据和雷达数据具有互补优势.在基于船舶AIS和雷达的船舶航迹融合研究中,根据研究方法的不同,可以分为统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]和集成融合方法[26]的船舶航迹融合研究.当前船舶AIS和雷达航迹融合方法具备一定的融合精度,但是随着通航环境的复杂和船舶航迹数据量的增多,融合算法的权重和门限选择存在一定的缺陷和局限性,融合算法对大批量数据的适用性和准确性有待进一步提高,需要改进现有数据融合方法中的航迹匹配、航迹关联和航迹融合算法,包括融合过程中权值和特征的选择的优化算法,融合后的高精度船舶航迹数据为后续船舶行为研究提供精准的数据源. ...
雷达与AIS数据融合算法研究
1
2017
... (3)航迹融合.船舶AIS设备在甚高频(Very High Frequency, VHF)频段内采用自组织时分多址接入(Self-organized Time Division Multiple Access,SOTDMA)技术自动收发船舶静动态信息,根据船舶的航行状态和速度的大小的不同,数据的接发间隔为2s~3min,AIS表征的船舶航迹是非等间距的离散特征点,同时AIS数据还可以反映船舶类型、尺度、目的港和预计到达时间等船舶自身和航行相关的参数.沿海、内河和港口水域安装的海事雷达可以主动探测获得监控水域内的船舶方位、距离数据,雷达数据包含了船舶形状、大小和水域的全景交通图像的特点[21],船舶AIS数据和雷达数据具有互补优势.在基于船舶AIS和雷达的船舶航迹融合研究中,根据研究方法的不同,可以分为统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]和集成融合方法[26]的船舶航迹融合研究.当前船舶AIS和雷达航迹融合方法具备一定的融合精度,但是随着通航环境的复杂和船舶航迹数据量的增多,融合算法的权重和门限选择存在一定的缺陷和局限性,融合算法对大批量数据的适用性和准确性有待进一步提高,需要改进现有数据融合方法中的航迹匹配、航迹关联和航迹融合算法,包括融合过程中权值和特征的选择的优化算法,融合后的高精度船舶航迹数据为后续船舶行为研究提供精准的数据源. ...
雷达与AIS目标航迹模糊关联算法与仿真
2
2006
... (3)航迹融合.船舶AIS设备在甚高频(Very High Frequency, VHF)频段内采用自组织时分多址接入(Self-organized Time Division Multiple Access,SOTDMA)技术自动收发船舶静动态信息,根据船舶的航行状态和速度的大小的不同,数据的接发间隔为2s~3min,AIS表征的船舶航迹是非等间距的离散特征点,同时AIS数据还可以反映船舶类型、尺度、目的港和预计到达时间等船舶自身和航行相关的参数.沿海、内河和港口水域安装的海事雷达可以主动探测获得监控水域内的船舶方位、距离数据,雷达数据包含了船舶形状、大小和水域的全景交通图像的特点[21],船舶AIS数据和雷达数据具有互补优势.在基于船舶AIS和雷达的船舶航迹融合研究中,根据研究方法的不同,可以分为统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]和集成融合方法[26]的船舶航迹融合研究.当前船舶AIS和雷达航迹融合方法具备一定的融合精度,但是随着通航环境的复杂和船舶航迹数据量的增多,融合算法的权重和门限选择存在一定的缺陷和局限性,融合算法对大批量数据的适用性和准确性有待进一步提高,需要改进现有数据融合方法中的航迹匹配、航迹关联和航迹融合算法,包括融合过程中权值和特征的选择的优化算法,融合后的高精度船舶航迹数据为后续船舶行为研究提供精准的数据源. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
雷达与AIS目标航迹模糊关联算法与仿真
2
2006
... (3)航迹融合.船舶AIS设备在甚高频(Very High Frequency, VHF)频段内采用自组织时分多址接入(Self-organized Time Division Multiple Access,SOTDMA)技术自动收发船舶静动态信息,根据船舶的航行状态和速度的大小的不同,数据的接发间隔为2s~3min,AIS表征的船舶航迹是非等间距的离散特征点,同时AIS数据还可以反映船舶类型、尺度、目的港和预计到达时间等船舶自身和航行相关的参数.沿海、内河和港口水域安装的海事雷达可以主动探测获得监控水域内的船舶方位、距离数据,雷达数据包含了船舶形状、大小和水域的全景交通图像的特点[21],船舶AIS数据和雷达数据具有互补优势.在基于船舶AIS和雷达的船舶航迹融合研究中,根据研究方法的不同,可以分为统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]和集成融合方法[26]的船舶航迹融合研究.当前船舶AIS和雷达航迹融合方法具备一定的融合精度,但是随着通航环境的复杂和船舶航迹数据量的增多,融合算法的权重和门限选择存在一定的缺陷和局限性,融合算法对大批量数据的适用性和准确性有待进一步提高,需要改进现有数据融合方法中的航迹匹配、航迹关联和航迹融合算法,包括融合过程中权值和特征的选择的优化算法,融合后的高精度船舶航迹数据为后续船舶行为研究提供精准的数据源. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
A preliminary study on targets association algorithm of radar and AIS using BP neural network
2
2011
... (3)航迹融合.船舶AIS设备在甚高频(Very High Frequency, VHF)频段内采用自组织时分多址接入(Self-organized Time Division Multiple Access,SOTDMA)技术自动收发船舶静动态信息,根据船舶的航行状态和速度的大小的不同,数据的接发间隔为2s~3min,AIS表征的船舶航迹是非等间距的离散特征点,同时AIS数据还可以反映船舶类型、尺度、目的港和预计到达时间等船舶自身和航行相关的参数.沿海、内河和港口水域安装的海事雷达可以主动探测获得监控水域内的船舶方位、距离数据,雷达数据包含了船舶形状、大小和水域的全景交通图像的特点[21],船舶AIS数据和雷达数据具有互补优势.在基于船舶AIS和雷达的船舶航迹融合研究中,根据研究方法的不同,可以分为统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]和集成融合方法[26]的船舶航迹融合研究.当前船舶AIS和雷达航迹融合方法具备一定的融合精度,但是随着通航环境的复杂和船舶航迹数据量的增多,融合算法的权重和门限选择存在一定的缺陷和局限性,融合算法对大批量数据的适用性和准确性有待进一步提高,需要改进现有数据融合方法中的航迹匹配、航迹关联和航迹融合算法,包括融合过程中权值和特征的选择的优化算法,融合后的高精度船舶航迹数据为后续船舶行为研究提供精准的数据源. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
卡尔曼滤波融合新算法及其船舶高精度液位测量的应用
2
2016
... (3)航迹融合.船舶AIS设备在甚高频(Very High Frequency, VHF)频段内采用自组织时分多址接入(Self-organized Time Division Multiple Access,SOTDMA)技术自动收发船舶静动态信息,根据船舶的航行状态和速度的大小的不同,数据的接发间隔为2s~3min,AIS表征的船舶航迹是非等间距的离散特征点,同时AIS数据还可以反映船舶类型、尺度、目的港和预计到达时间等船舶自身和航行相关的参数.沿海、内河和港口水域安装的海事雷达可以主动探测获得监控水域内的船舶方位、距离数据,雷达数据包含了船舶形状、大小和水域的全景交通图像的特点[21],船舶AIS数据和雷达数据具有互补优势.在基于船舶AIS和雷达的船舶航迹融合研究中,根据研究方法的不同,可以分为统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]和集成融合方法[26]的船舶航迹融合研究.当前船舶AIS和雷达航迹融合方法具备一定的融合精度,但是随着通航环境的复杂和船舶航迹数据量的增多,融合算法的权重和门限选择存在一定的缺陷和局限性,融合算法对大批量数据的适用性和准确性有待进一步提高,需要改进现有数据融合方法中的航迹匹配、航迹关联和航迹融合算法,包括融合过程中权值和特征的选择的优化算法,融合后的高精度船舶航迹数据为后续船舶行为研究提供精准的数据源. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
卡尔曼滤波融合新算法及其船舶高精度液位测量的应用
2
2016
... (3)航迹融合.船舶AIS设备在甚高频(Very High Frequency, VHF)频段内采用自组织时分多址接入(Self-organized Time Division Multiple Access,SOTDMA)技术自动收发船舶静动态信息,根据船舶的航行状态和速度的大小的不同,数据的接发间隔为2s~3min,AIS表征的船舶航迹是非等间距的离散特征点,同时AIS数据还可以反映船舶类型、尺度、目的港和预计到达时间等船舶自身和航行相关的参数.沿海、内河和港口水域安装的海事雷达可以主动探测获得监控水域内的船舶方位、距离数据,雷达数据包含了船舶形状、大小和水域的全景交通图像的特点[21],船舶AIS数据和雷达数据具有互补优势.在基于船舶AIS和雷达的船舶航迹融合研究中,根据研究方法的不同,可以分为统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]和集成融合方法[26]的船舶航迹融合研究.当前船舶AIS和雷达航迹融合方法具备一定的融合精度,但是随着通航环境的复杂和船舶航迹数据量的增多,融合算法的权重和门限选择存在一定的缺陷和局限性,融合算法对大批量数据的适用性和准确性有待进一步提高,需要改进现有数据融合方法中的航迹匹配、航迹关联和航迹融合算法,包括融合过程中权值和特征的选择的优化算法,融合后的高精度船舶航迹数据为后续船舶行为研究提供精准的数据源. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于时间序列聚类的多雷达数据融合
2
2019
... (3)航迹融合.船舶AIS设备在甚高频(Very High Frequency, VHF)频段内采用自组织时分多址接入(Self-organized Time Division Multiple Access,SOTDMA)技术自动收发船舶静动态信息,根据船舶的航行状态和速度的大小的不同,数据的接发间隔为2s~3min,AIS表征的船舶航迹是非等间距的离散特征点,同时AIS数据还可以反映船舶类型、尺度、目的港和预计到达时间等船舶自身和航行相关的参数.沿海、内河和港口水域安装的海事雷达可以主动探测获得监控水域内的船舶方位、距离数据,雷达数据包含了船舶形状、大小和水域的全景交通图像的特点[21],船舶AIS数据和雷达数据具有互补优势.在基于船舶AIS和雷达的船舶航迹融合研究中,根据研究方法的不同,可以分为统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]和集成融合方法[26]的船舶航迹融合研究.当前船舶AIS和雷达航迹融合方法具备一定的融合精度,但是随着通航环境的复杂和船舶航迹数据量的增多,融合算法的权重和门限选择存在一定的缺陷和局限性,融合算法对大批量数据的适用性和准确性有待进一步提高,需要改进现有数据融合方法中的航迹匹配、航迹关联和航迹融合算法,包括融合过程中权值和特征的选择的优化算法,融合后的高精度船舶航迹数据为后续船舶行为研究提供精准的数据源. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于时间序列聚类的多雷达数据融合
2
2019
... (3)航迹融合.船舶AIS设备在甚高频(Very High Frequency, VHF)频段内采用自组织时分多址接入(Self-organized Time Division Multiple Access,SOTDMA)技术自动收发船舶静动态信息,根据船舶的航行状态和速度的大小的不同,数据的接发间隔为2s~3min,AIS表征的船舶航迹是非等间距的离散特征点,同时AIS数据还可以反映船舶类型、尺度、目的港和预计到达时间等船舶自身和航行相关的参数.沿海、内河和港口水域安装的海事雷达可以主动探测获得监控水域内的船舶方位、距离数据,雷达数据包含了船舶形状、大小和水域的全景交通图像的特点[21],船舶AIS数据和雷达数据具有互补优势.在基于船舶AIS和雷达的船舶航迹融合研究中,根据研究方法的不同,可以分为统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]和集成融合方法[26]的船舶航迹融合研究.当前船舶AIS和雷达航迹融合方法具备一定的融合精度,但是随着通航环境的复杂和船舶航迹数据量的增多,融合算法的权重和门限选择存在一定的缺陷和局限性,融合算法对大批量数据的适用性和准确性有待进一步提高,需要改进现有数据融合方法中的航迹匹配、航迹关联和航迹融合算法,包括融合过程中权值和特征的选择的优化算法,融合后的高精度船舶航迹数据为后续船舶行为研究提供精准的数据源. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
内河船舶AIS与雷达动态信息集成性融合
2
2017
... (3)航迹融合.船舶AIS设备在甚高频(Very High Frequency, VHF)频段内采用自组织时分多址接入(Self-organized Time Division Multiple Access,SOTDMA)技术自动收发船舶静动态信息,根据船舶的航行状态和速度的大小的不同,数据的接发间隔为2s~3min,AIS表征的船舶航迹是非等间距的离散特征点,同时AIS数据还可以反映船舶类型、尺度、目的港和预计到达时间等船舶自身和航行相关的参数.沿海、内河和港口水域安装的海事雷达可以主动探测获得监控水域内的船舶方位、距离数据,雷达数据包含了船舶形状、大小和水域的全景交通图像的特点[21],船舶AIS数据和雷达数据具有互补优势.在基于船舶AIS和雷达的船舶航迹融合研究中,根据研究方法的不同,可以分为统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]和集成融合方法[26]的船舶航迹融合研究.当前船舶AIS和雷达航迹融合方法具备一定的融合精度,但是随着通航环境的复杂和船舶航迹数据量的增多,融合算法的权重和门限选择存在一定的缺陷和局限性,融合算法对大批量数据的适用性和准确性有待进一步提高,需要改进现有数据融合方法中的航迹匹配、航迹关联和航迹融合算法,包括融合过程中权值和特征的选择的优化算法,融合后的高精度船舶航迹数据为后续船舶行为研究提供精准的数据源. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
内河船舶AIS与雷达动态信息集成性融合
2
2017
... (3)航迹融合.船舶AIS设备在甚高频(Very High Frequency, VHF)频段内采用自组织时分多址接入(Self-organized Time Division Multiple Access,SOTDMA)技术自动收发船舶静动态信息,根据船舶的航行状态和速度的大小的不同,数据的接发间隔为2s~3min,AIS表征的船舶航迹是非等间距的离散特征点,同时AIS数据还可以反映船舶类型、尺度、目的港和预计到达时间等船舶自身和航行相关的参数.沿海、内河和港口水域安装的海事雷达可以主动探测获得监控水域内的船舶方位、距离数据,雷达数据包含了船舶形状、大小和水域的全景交通图像的特点[21],船舶AIS数据和雷达数据具有互补优势.在基于船舶AIS和雷达的船舶航迹融合研究中,根据研究方法的不同,可以分为统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]和集成融合方法[26]的船舶航迹融合研究.当前船舶AIS和雷达航迹融合方法具备一定的融合精度,但是随着通航环境的复杂和船舶航迹数据量的增多,融合算法的权重和门限选择存在一定的缺陷和局限性,融合算法对大批量数据的适用性和准确性有待进一步提高,需要改进现有数据融合方法中的航迹匹配、航迹关联和航迹融合算法,包括融合过程中权值和特征的选择的优化算法,融合后的高精度船舶航迹数据为后续船舶行为研究提供精准的数据源. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于Douglas-Peucker算法的船舶AIS航迹数据压缩
2
2015
... (4)航迹压缩.随着船舶航迹数据存储数量的增加,需要对海量的船舶AIS在确保数据质量的前提下降低存储成本,需要用数据压缩方法对船舶AIS航迹数据进行压缩,以提高航迹数据的计算和显示效率.根据船舶轨迹的压缩是否需要完整的轨迹数据,把压缩算法分为离线压缩和在线压缩2种方法.在离线压缩方面,主要有Douglas-Peucker(DP)算法[27]、Dead Reckoning[28]、OLDCAT[29]等算法,对以上离线航迹压缩算法在船舶轨迹上的压缩误差和执行时间进行了比较,结果表明DP算法的压缩误差最小[30].离线压缩可以在保持较低失真度的情况下对AIS提供的船舶运动轨迹数据进行有效快速的压缩.在在线压缩方面,在线压缩在分析船舶AIS数据时间序列特征和操纵特征的基础上,运用滑动窗口方法[31,32]、在线有向无环图方法[33]实现船舶航迹数据压缩,相较DP压缩算法,该类算法保留了较多特征点.船舶航迹压缩取决于距离和航向阈值的选取,选取阈值越大,压缩率越高,保留的关键船舶航迹点越少,当距离阈值为120 m,压缩率可以达到97%[31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于Douglas-Peucker算法的船舶AIS航迹数据压缩
2
2015
... (4)航迹压缩.随着船舶航迹数据存储数量的增加,需要对海量的船舶AIS在确保数据质量的前提下降低存储成本,需要用数据压缩方法对船舶AIS航迹数据进行压缩,以提高航迹数据的计算和显示效率.根据船舶轨迹的压缩是否需要完整的轨迹数据,把压缩算法分为离线压缩和在线压缩2种方法.在离线压缩方面,主要有Douglas-Peucker(DP)算法[27]、Dead Reckoning[28]、OLDCAT[29]等算法,对以上离线航迹压缩算法在船舶轨迹上的压缩误差和执行时间进行了比较,结果表明DP算法的压缩误差最小[30].离线压缩可以在保持较低失真度的情况下对AIS提供的船舶运动轨迹数据进行有效快速的压缩.在在线压缩方面,在线压缩在分析船舶AIS数据时间序列特征和操纵特征的基础上,运用滑动窗口方法[31,32]、在线有向无环图方法[33]实现船舶航迹数据压缩,相较DP压缩算法,该类算法保留了较多特征点.船舶航迹压缩取决于距离和航向阈值的选取,选取阈值越大,压缩率越高,保留的关键船舶航迹点越少,当距离阈值为120 m,压缩率可以达到97%[31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
2
... (4)航迹压缩.随着船舶航迹数据存储数量的增加,需要对海量的船舶AIS在确保数据质量的前提下降低存储成本,需要用数据压缩方法对船舶AIS航迹数据进行压缩,以提高航迹数据的计算和显示效率.根据船舶轨迹的压缩是否需要完整的轨迹数据,把压缩算法分为离线压缩和在线压缩2种方法.在离线压缩方面,主要有Douglas-Peucker(DP)算法[27]、Dead Reckoning[28]、OLDCAT[29]等算法,对以上离线航迹压缩算法在船舶轨迹上的压缩误差和执行时间进行了比较,结果表明DP算法的压缩误差最小[30].离线压缩可以在保持较低失真度的情况下对AIS提供的船舶运动轨迹数据进行有效快速的压缩.在在线压缩方面,在线压缩在分析船舶AIS数据时间序列特征和操纵特征的基础上,运用滑动窗口方法[31,32]、在线有向无环图方法[33]实现船舶航迹数据压缩,相较DP压缩算法,该类算法保留了较多特征点.船舶航迹压缩取决于距离和航向阈值的选取,选取阈值越大,压缩率越高,保留的关键船舶航迹点越少,当距离阈值为120 m,压缩率可以达到97%[31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
An online data compression algorithm for trajectories (An OLDCAT)
2
2013
... (4)航迹压缩.随着船舶航迹数据存储数量的增加,需要对海量的船舶AIS在确保数据质量的前提下降低存储成本,需要用数据压缩方法对船舶AIS航迹数据进行压缩,以提高航迹数据的计算和显示效率.根据船舶轨迹的压缩是否需要完整的轨迹数据,把压缩算法分为离线压缩和在线压缩2种方法.在离线压缩方面,主要有Douglas-Peucker(DP)算法[27]、Dead Reckoning[28]、OLDCAT[29]等算法,对以上离线航迹压缩算法在船舶轨迹上的压缩误差和执行时间进行了比较,结果表明DP算法的压缩误差最小[30].离线压缩可以在保持较低失真度的情况下对AIS提供的船舶运动轨迹数据进行有效快速的压缩.在在线压缩方面,在线压缩在分析船舶AIS数据时间序列特征和操纵特征的基础上,运用滑动窗口方法[31,32]、在线有向无环图方法[33]实现船舶航迹数据压缩,相较DP压缩算法,该类算法保留了较多特征点.船舶航迹压缩取决于距离和航向阈值的选取,选取阈值越大,压缩率越高,保留的关键船舶航迹点越少,当距离阈值为120 m,压缩率可以达到97%[31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
Performance analysis of trajectory compression algorithms on Marine Surveillance data
2
2017
... (4)航迹压缩.随着船舶航迹数据存储数量的增加,需要对海量的船舶AIS在确保数据质量的前提下降低存储成本,需要用数据压缩方法对船舶AIS航迹数据进行压缩,以提高航迹数据的计算和显示效率.根据船舶轨迹的压缩是否需要完整的轨迹数据,把压缩算法分为离线压缩和在线压缩2种方法.在离线压缩方面,主要有Douglas-Peucker(DP)算法[27]、Dead Reckoning[28]、OLDCAT[29]等算法,对以上离线航迹压缩算法在船舶轨迹上的压缩误差和执行时间进行了比较,结果表明DP算法的压缩误差最小[30].离线压缩可以在保持较低失真度的情况下对AIS提供的船舶运动轨迹数据进行有效快速的压缩.在在线压缩方面,在线压缩在分析船舶AIS数据时间序列特征和操纵特征的基础上,运用滑动窗口方法[31,32]、在线有向无环图方法[33]实现船舶航迹数据压缩,相较DP压缩算法,该类算法保留了较多特征点.船舶航迹压缩取决于距离和航向阈值的选取,选取阈值越大,压缩率越高,保留的关键船舶航迹点越少,当距离阈值为120 m,压缩率可以达到97%[31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
改进的Sliding Window在线船舶AIS轨迹数据压缩算法
3
2018
... (4)航迹压缩.随着船舶航迹数据存储数量的增加,需要对海量的船舶AIS在确保数据质量的前提下降低存储成本,需要用数据压缩方法对船舶AIS航迹数据进行压缩,以提高航迹数据的计算和显示效率.根据船舶轨迹的压缩是否需要完整的轨迹数据,把压缩算法分为离线压缩和在线压缩2种方法.在离线压缩方面,主要有Douglas-Peucker(DP)算法[27]、Dead Reckoning[28]、OLDCAT[29]等算法,对以上离线航迹压缩算法在船舶轨迹上的压缩误差和执行时间进行了比较,结果表明DP算法的压缩误差最小[30].离线压缩可以在保持较低失真度的情况下对AIS提供的船舶运动轨迹数据进行有效快速的压缩.在在线压缩方面,在线压缩在分析船舶AIS数据时间序列特征和操纵特征的基础上,运用滑动窗口方法[31,32]、在线有向无环图方法[33]实现船舶航迹数据压缩,相较DP压缩算法,该类算法保留了较多特征点.船舶航迹压缩取决于距离和航向阈值的选取,选取阈值越大,压缩率越高,保留的关键船舶航迹点越少,当距离阈值为120 m,压缩率可以达到97%[31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... [31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
改进的Sliding Window在线船舶AIS轨迹数据压缩算法
3
2018
... (4)航迹压缩.随着船舶航迹数据存储数量的增加,需要对海量的船舶AIS在确保数据质量的前提下降低存储成本,需要用数据压缩方法对船舶AIS航迹数据进行压缩,以提高航迹数据的计算和显示效率.根据船舶轨迹的压缩是否需要完整的轨迹数据,把压缩算法分为离线压缩和在线压缩2种方法.在离线压缩方面,主要有Douglas-Peucker(DP)算法[27]、Dead Reckoning[28]、OLDCAT[29]等算法,对以上离线航迹压缩算法在船舶轨迹上的压缩误差和执行时间进行了比较,结果表明DP算法的压缩误差最小[30].离线压缩可以在保持较低失真度的情况下对AIS提供的船舶运动轨迹数据进行有效快速的压缩.在在线压缩方面,在线压缩在分析船舶AIS数据时间序列特征和操纵特征的基础上,运用滑动窗口方法[31,32]、在线有向无环图方法[33]实现船舶航迹数据压缩,相较DP压缩算法,该类算法保留了较多特征点.船舶航迹压缩取决于距离和航向阈值的选取,选取阈值越大,压缩率越高,保留的关键船舶航迹点越少,当距离阈值为120 m,压缩率可以达到97%[31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... [31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于改进滑动窗口的渔船AIS轨迹数据压缩算法
2
2020
... (4)航迹压缩.随着船舶航迹数据存储数量的增加,需要对海量的船舶AIS在确保数据质量的前提下降低存储成本,需要用数据压缩方法对船舶AIS航迹数据进行压缩,以提高航迹数据的计算和显示效率.根据船舶轨迹的压缩是否需要完整的轨迹数据,把压缩算法分为离线压缩和在线压缩2种方法.在离线压缩方面,主要有Douglas-Peucker(DP)算法[27]、Dead Reckoning[28]、OLDCAT[29]等算法,对以上离线航迹压缩算法在船舶轨迹上的压缩误差和执行时间进行了比较,结果表明DP算法的压缩误差最小[30].离线压缩可以在保持较低失真度的情况下对AIS提供的船舶运动轨迹数据进行有效快速的压缩.在在线压缩方面,在线压缩在分析船舶AIS数据时间序列特征和操纵特征的基础上,运用滑动窗口方法[31,32]、在线有向无环图方法[33]实现船舶航迹数据压缩,相较DP压缩算法,该类算法保留了较多特征点.船舶航迹压缩取决于距离和航向阈值的选取,选取阈值越大,压缩率越高,保留的关键船舶航迹点越少,当距离阈值为120 m,压缩率可以达到97%[31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于改进滑动窗口的渔船AIS轨迹数据压缩算法
2
2020
... (4)航迹压缩.随着船舶航迹数据存储数量的增加,需要对海量的船舶AIS在确保数据质量的前提下降低存储成本,需要用数据压缩方法对船舶AIS航迹数据进行压缩,以提高航迹数据的计算和显示效率.根据船舶轨迹的压缩是否需要完整的轨迹数据,把压缩算法分为离线压缩和在线压缩2种方法.在离线压缩方面,主要有Douglas-Peucker(DP)算法[27]、Dead Reckoning[28]、OLDCAT[29]等算法,对以上离线航迹压缩算法在船舶轨迹上的压缩误差和执行时间进行了比较,结果表明DP算法的压缩误差最小[30].离线压缩可以在保持较低失真度的情况下对AIS提供的船舶运动轨迹数据进行有效快速的压缩.在在线压缩方面,在线压缩在分析船舶AIS数据时间序列特征和操纵特征的基础上,运用滑动窗口方法[31,32]、在线有向无环图方法[33]实现船舶航迹数据压缩,相较DP压缩算法,该类算法保留了较多特征点.船舶航迹压缩取决于距离和航向阈值的选取,选取阈值越大,压缩率越高,保留的关键船舶航迹点越少,当距离阈值为120 m,压缩率可以达到97%[31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于在线有向无环图的船舶轨迹压缩算法
2
2020
... (4)航迹压缩.随着船舶航迹数据存储数量的增加,需要对海量的船舶AIS在确保数据质量的前提下降低存储成本,需要用数据压缩方法对船舶AIS航迹数据进行压缩,以提高航迹数据的计算和显示效率.根据船舶轨迹的压缩是否需要完整的轨迹数据,把压缩算法分为离线压缩和在线压缩2种方法.在离线压缩方面,主要有Douglas-Peucker(DP)算法[27]、Dead Reckoning[28]、OLDCAT[29]等算法,对以上离线航迹压缩算法在船舶轨迹上的压缩误差和执行时间进行了比较,结果表明DP算法的压缩误差最小[30].离线压缩可以在保持较低失真度的情况下对AIS提供的船舶运动轨迹数据进行有效快速的压缩.在在线压缩方面,在线压缩在分析船舶AIS数据时间序列特征和操纵特征的基础上,运用滑动窗口方法[31,32]、在线有向无环图方法[33]实现船舶航迹数据压缩,相较DP压缩算法,该类算法保留了较多特征点.船舶航迹压缩取决于距离和航向阈值的选取,选取阈值越大,压缩率越高,保留的关键船舶航迹点越少,当距离阈值为120 m,压缩率可以达到97%[31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于在线有向无环图的船舶轨迹压缩算法
2
2020
... (4)航迹压缩.随着船舶航迹数据存储数量的增加,需要对海量的船舶AIS在确保数据质量的前提下降低存储成本,需要用数据压缩方法对船舶AIS航迹数据进行压缩,以提高航迹数据的计算和显示效率.根据船舶轨迹的压缩是否需要完整的轨迹数据,把压缩算法分为离线压缩和在线压缩2种方法.在离线压缩方面,主要有Douglas-Peucker(DP)算法[27]、Dead Reckoning[28]、OLDCAT[29]等算法,对以上离线航迹压缩算法在船舶轨迹上的压缩误差和执行时间进行了比较,结果表明DP算法的压缩误差最小[30].离线压缩可以在保持较低失真度的情况下对AIS提供的船舶运动轨迹数据进行有效快速的压缩.在在线压缩方面,在线压缩在分析船舶AIS数据时间序列特征和操纵特征的基础上,运用滑动窗口方法[31,32]、在线有向无环图方法[33]实现船舶航迹数据压缩,相较DP压缩算法,该类算法保留了较多特征点.船舶航迹压缩取决于距离和航向阈值的选取,选取阈值越大,压缩率越高,保留的关键船舶航迹点越少,当距离阈值为120 m,压缩率可以达到97%[31],船舶航迹压缩在保证船舶行为的重要特征点的基础上可以提高船舶轨迹数据的运算效率,在研究过程中需要结合研究需要,在保留关键船舶航迹点的基础上,选取合适的阈值参数,因此如何结合航迹数据特征点分布选取合适的阈值值得深入研究. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
船舶交通流行为特征及其在水上交通组织中的应用
1
2014
... 船舶交通流参数特征规律有助于水上交通系统的仿真和交通组织和管理,使水域船舶交通流更加有序合理,进而降低水上交通事故发生率和提高水域的通航效率[34].船舶交通流包含交通流的位置、速度、方向、船舶数量和船舶间时距等特征,根据研究内容的复杂程度,可以分为船舶交通流特征参数拟合和交通流特征参数合成研究. ...
船舶交通流行为特征及其在水上交通组织中的应用
1
2014
... 船舶交通流参数特征规律有助于水上交通系统的仿真和交通组织和管理,使水域船舶交通流更加有序合理,进而降低水上交通事故发生率和提高水域的通航效率[34].船舶交通流包含交通流的位置、速度、方向、船舶数量和船舶间时距等特征,根据研究内容的复杂程度,可以分为船舶交通流特征参数拟合和交通流特征参数合成研究. ...
基于AIS 数据的成山头水域船舶交通流研究
2
2012
... (1)船舶交通流特征参数拟合.以往船舶交通流之间的关系较多是通过经验统计的方法定性的描述船,缺乏精确的梳理统计模型和指标,而船舶AIS数据具备大样本的特点,可以实现船舶交通流中船舶交通量和船舶速度分布及其之间的关系的拟合[35]、航道内船舶航行位置的分布函数的拟合[36,37]、船舶到达规律参数的拟合[38],通过AIS数据驱动和数理统计拟合的方法,验证和提高了基于经验船舶交通流参数间的数理关系,可以使得船舶交通特征模型和参数更加丰富和准确. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于AIS 数据的成山头水域船舶交通流研究
2
2012
... (1)船舶交通流特征参数拟合.以往船舶交通流之间的关系较多是通过经验统计的方法定性的描述船,缺乏精确的梳理统计模型和指标,而船舶AIS数据具备大样本的特点,可以实现船舶交通流中船舶交通量和船舶速度分布及其之间的关系的拟合[35]、航道内船舶航行位置的分布函数的拟合[36,37]、船舶到达规律参数的拟合[38],通过AIS数据驱动和数理统计拟合的方法,验证和提高了基于经验船舶交通流参数间的数理关系,可以使得船舶交通特征模型和参数更加丰富和准确. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于IWRAP模型的船舶交通流数据拟合模型
2
2018
... (1)船舶交通流特征参数拟合.以往船舶交通流之间的关系较多是通过经验统计的方法定性的描述船,缺乏精确的梳理统计模型和指标,而船舶AIS数据具备大样本的特点,可以实现船舶交通流中船舶交通量和船舶速度分布及其之间的关系的拟合[35]、航道内船舶航行位置的分布函数的拟合[36,37]、船舶到达规律参数的拟合[38],通过AIS数据驱动和数理统计拟合的方法,验证和提高了基于经验船舶交通流参数间的数理关系,可以使得船舶交通特征模型和参数更加丰富和准确. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于IWRAP模型的船舶交通流数据拟合模型
2
2018
... (1)船舶交通流特征参数拟合.以往船舶交通流之间的关系较多是通过经验统计的方法定性的描述船,缺乏精确的梳理统计模型和指标,而船舶AIS数据具备大样本的特点,可以实现船舶交通流中船舶交通量和船舶速度分布及其之间的关系的拟合[35]、航道内船舶航行位置的分布函数的拟合[36,37]、船舶到达规律参数的拟合[38],通过AIS数据驱动和数理统计拟合的方法,验证和提高了基于经验船舶交通流参数间的数理关系,可以使得船舶交通特征模型和参数更加丰富和准确. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
Use of AIS data to characterise marine traffic patterns and ship collision risk off the coast of Portugal
1
2013
... (1)船舶交通流特征参数拟合.以往船舶交通流之间的关系较多是通过经验统计的方法定性的描述船,缺乏精确的梳理统计模型和指标,而船舶AIS数据具备大样本的特点,可以实现船舶交通流中船舶交通量和船舶速度分布及其之间的关系的拟合[35]、航道内船舶航行位置的分布函数的拟合[36,37]、船舶到达规律参数的拟合[38],通过AIS数据驱动和数理统计拟合的方法,验证和提高了基于经验船舶交通流参数间的数理关系,可以使得船舶交通特征模型和参数更加丰富和准确. ...
利用AIS数据挖掘建立船舶到达规律模型
2
2016
... (1)船舶交通流特征参数拟合.以往船舶交通流之间的关系较多是通过经验统计的方法定性的描述船,缺乏精确的梳理统计模型和指标,而船舶AIS数据具备大样本的特点,可以实现船舶交通流中船舶交通量和船舶速度分布及其之间的关系的拟合[35]、航道内船舶航行位置的分布函数的拟合[36,37]、船舶到达规律参数的拟合[38],通过AIS数据驱动和数理统计拟合的方法,验证和提高了基于经验船舶交通流参数间的数理关系,可以使得船舶交通特征模型和参数更加丰富和准确. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
利用AIS数据挖掘建立船舶到达规律模型
2
2016
... (1)船舶交通流特征参数拟合.以往船舶交通流之间的关系较多是通过经验统计的方法定性的描述船,缺乏精确的梳理统计模型和指标,而船舶AIS数据具备大样本的特点,可以实现船舶交通流中船舶交通量和船舶速度分布及其之间的关系的拟合[35]、航道内船舶航行位置的分布函数的拟合[36,37]、船舶到达规律参数的拟合[38],通过AIS数据驱动和数理统计拟合的方法,验证和提高了基于经验船舶交通流参数间的数理关系,可以使得船舶交通特征模型和参数更加丰富和准确. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于场方法的船舶交通流分析
2
2014
... (2)船舶交通流特征合成.船舶交通流参数的合成是在交通流的位置、速度、方向、船舶数量和船舶间时距等单维特征的基础上,运用数据场和Delaunay剖分插值[39]、数据聚类[40]的方法,合成具有多重含义的船舶交通流场、船舶转向点和交通流框架等多维特征.船舶交通特征的合成研究对于水域的交通流管理和船舶航路规划具有重要的指导意义. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于场方法的船舶交通流分析
2
2014
... (2)船舶交通流特征合成.船舶交通流参数的合成是在交通流的位置、速度、方向、船舶数量和船舶间时距等单维特征的基础上,运用数据场和Delaunay剖分插值[39]、数据聚类[40]的方法,合成具有多重含义的船舶交通流场、船舶转向点和交通流框架等多维特征.船舶交通特征的合成研究对于水域的交通流管理和船舶航路规划具有重要的指导意义. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
多算法结合的船舶交通流框架提取
2
2021
... (2)船舶交通流特征合成.船舶交通流参数的合成是在交通流的位置、速度、方向、船舶数量和船舶间时距等单维特征的基础上,运用数据场和Delaunay剖分插值[39]、数据聚类[40]的方法,合成具有多重含义的船舶交通流场、船舶转向点和交通流框架等多维特征.船舶交通特征的合成研究对于水域的交通流管理和船舶航路规划具有重要的指导意义. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
多算法结合的船舶交通流框架提取
2
2021
... (2)船舶交通流特征合成.船舶交通流参数的合成是在交通流的位置、速度、方向、船舶数量和船舶间时距等单维特征的基础上,运用数据场和Delaunay剖分插值[39]、数据聚类[40]的方法,合成具有多重含义的船舶交通流场、船舶转向点和交通流框架等多维特征.船舶交通特征的合成研究对于水域的交通流管理和船舶航路规划具有重要的指导意义. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
船舶会遇的时空数据挖掘算法及应用
2
2010
... (1)船舶会遇时空特征研究.该研究主要根据水上交通工程理论中船舶会遇定义,设计从海量的船舶AIS数据中提取船舶会遇信息的算法,从船舶会遇的空间、时间分布、会遇船舶尺度和态势等多个角度研究水域内船舶会遇状况[41]和特定船舶航行过程中周围船舶的会遇数目、会遇态势和会遇最近距离等信息[42],船舶会遇时空特征挖掘结果可以为水上交通的高风险区域的监控提供理论依据,也可以为特定船舶的航行操纵和风险应对提供决策. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
船舶会遇的时空数据挖掘算法及应用
2
2010
... (1)船舶会遇时空特征研究.该研究主要根据水上交通工程理论中船舶会遇定义,设计从海量的船舶AIS数据中提取船舶会遇信息的算法,从船舶会遇的空间、时间分布、会遇船舶尺度和态势等多个角度研究水域内船舶会遇状况[41]和特定船舶航行过程中周围船舶的会遇数目、会遇态势和会遇最近距离等信息[42],船舶会遇时空特征挖掘结果可以为水上交通的高风险区域的监控提供理论依据,也可以为特定船舶的航行操纵和风险应对提供决策. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于AIS的特定船舶会遇实况分布
2
2014
... (1)船舶会遇时空特征研究.该研究主要根据水上交通工程理论中船舶会遇定义,设计从海量的船舶AIS数据中提取船舶会遇信息的算法,从船舶会遇的空间、时间分布、会遇船舶尺度和态势等多个角度研究水域内船舶会遇状况[41]和特定船舶航行过程中周围船舶的会遇数目、会遇态势和会遇最近距离等信息[42],船舶会遇时空特征挖掘结果可以为水上交通的高风险区域的监控提供理论依据,也可以为特定船舶的航行操纵和风险应对提供决策. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于AIS的特定船舶会遇实况分布
2
2014
... (1)船舶会遇时空特征研究.该研究主要根据水上交通工程理论中船舶会遇定义,设计从海量的船舶AIS数据中提取船舶会遇信息的算法,从船舶会遇的空间、时间分布、会遇船舶尺度和态势等多个角度研究水域内船舶会遇状况[41]和特定船舶航行过程中周围船舶的会遇数目、会遇态势和会遇最近距离等信息[42],船舶会遇时空特征挖掘结果可以为水上交通的高风险区域的监控提供理论依据,也可以为特定船舶的航行操纵和风险应对提供决策. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
AIS数据中船舶会遇信息的提取方法
2
2017
... (2)会遇船舶紧迫度研究.该研究主要是根据避碰规则和航海实践经验,在AIS数据中根据船舶运动几何关系提取对不同会遇态势下的船舶会遇样本[43],然后考虑本船速度的动态圆形领域为空间约束条件和其他船舶相对于本船的方位分布和距离指标的影响,提出船舶会遇局面紧迫度的计算模型,运用热力图可视化方式量化会遇船舶紧迫度[44]和自适应理解模型[45],会遇船舶的紧迫度量化了会遇船舶间的碰撞风险的大小,研究方法从基础的船舶运动几何关系方法,向着支持向量机和贝叶斯网络的智能方法发展. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
AIS数据中船舶会遇信息的提取方法
2
2017
... (2)会遇船舶紧迫度研究.该研究主要是根据避碰规则和航海实践经验,在AIS数据中根据船舶运动几何关系提取对不同会遇态势下的船舶会遇样本[43],然后考虑本船速度的动态圆形领域为空间约束条件和其他船舶相对于本船的方位分布和距离指标的影响,提出船舶会遇局面紧迫度的计算模型,运用热力图可视化方式量化会遇船舶紧迫度[44]和自适应理解模型[45],会遇船舶的紧迫度量化了会遇船舶间的碰撞风险的大小,研究方法从基础的船舶运动几何关系方法,向着支持向量机和贝叶斯网络的智能方法发展. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于AIS的船舶会遇局面紧迫度量化分析
2
2019
... (2)会遇船舶紧迫度研究.该研究主要是根据避碰规则和航海实践经验,在AIS数据中根据船舶运动几何关系提取对不同会遇态势下的船舶会遇样本[43],然后考虑本船速度的动态圆形领域为空间约束条件和其他船舶相对于本船的方位分布和距离指标的影响,提出船舶会遇局面紧迫度的计算模型,运用热力图可视化方式量化会遇船舶紧迫度[44]和自适应理解模型[45],会遇船舶的紧迫度量化了会遇船舶间的碰撞风险的大小,研究方法从基础的船舶运动几何关系方法,向着支持向量机和贝叶斯网络的智能方法发展. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
基于AIS的船舶会遇局面紧迫度量化分析
2
2019
... (2)会遇船舶紧迫度研究.该研究主要是根据避碰规则和航海实践经验,在AIS数据中根据船舶运动几何关系提取对不同会遇态势下的船舶会遇样本[43],然后考虑本船速度的动态圆形领域为空间约束条件和其他船舶相对于本船的方位分布和距离指标的影响,提出船舶会遇局面紧迫度的计算模型,运用热力图可视化方式量化会遇船舶紧迫度[44]和自适应理解模型[45],会遇船舶的紧迫度量化了会遇船舶间的碰撞风险的大小,研究方法从基础的船舶运动几何关系方法,向着支持向量机和贝叶斯网络的智能方法发展. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
Multi-ship encounter situation adaptive understanding by individual navigation intention inference
2
2021
... (2)会遇船舶紧迫度研究.该研究主要是根据避碰规则和航海实践经验,在AIS数据中根据船舶运动几何关系提取对不同会遇态势下的船舶会遇样本[43],然后考虑本船速度的动态圆形领域为空间约束条件和其他船舶相对于本船的方位分布和距离指标的影响,提出船舶会遇局面紧迫度的计算模型,运用热力图可视化方式量化会遇船舶紧迫度[44]和自适应理解模型[45],会遇船舶的紧迫度量化了会遇船舶间的碰撞风险的大小,研究方法从基础的船舶运动几何关系方法,向着支持向量机和贝叶斯网络的智能方法发展. ...
... Summary of research contents and methods of marine traffic element
Tab. 1 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹数据预处理 | 航迹清洗 | 数据查询方法[11] |
| 航迹插值 | 线性插值[12]、三次样条插值[13]、拉格朗日插值[14]、均值插值和向量函数的插值[15]、复合插值[16,17,18]、机器学习的插值方法[19,20] |
| 航迹融合 | 统计加权方法[22]、基于BP神经网络的方法[23]、基于卡尔曼滤波的方法[24]、时间序列聚类的方法[25]、集成融合方法[26] |
| 航迹压缩 | 离线压缩方法(DP算法[27]、Dead Reckoning[28]、OLDCAT[29]、扫描-选择-移动算法[30])、在线压缩方法(改进的滑动窗口[31,32]、在线有向无环图[33]) |
| 船舶交通流参数特征分布分析 | 交通流特征参数拟合 | 船舶交通量和速度模型拟合[35]、交通流风险模型的拟合[36]、船舶到达规律模型拟合[38] |
| 交通流特征合成 | 船舶交通流场方法[39]、密度聚类方法[40] |
| 船舶会遇分析 | 船舶会遇时空特征 | 会遇时空特征统计[41,42] |
| 会遇船舶紧迫度 | 船舶运动几何关系[43]、空间约束和热力图方法[44-45] 、支持向量机-贝叶斯滤波方法[4] |
船舶AIS数据蕴含的大量船舶的静态和动态信息可以定量化表征水上交通要素,通过对水上交通要素研究的总结分析和表1的内容可以看出: ...
1
2004
... 船舶行为是指船舶在驾驶人员操纵下以航行、避让为主要目的行动方式和规律,通过对船舶行为的分析研究,可以掌握船舶在航行、操纵和避碰规律,为研究船舶交通理论、开发助航仪器、交通安全管理和规划提供依据[46].基于AIS数据的船舶行为航迹数据隐含着船舶行为的时空分布规律,需要运用数据挖掘中的无监督聚类分析方法挖掘隐含的规律特征,根据处理的AIS数据的结构特征的不同,在研究中可以分为船舶航迹点和航迹段的聚类,船舶轨迹段的聚类可以获得更加完整的船舶行为模式分布特征.在聚类挖掘中首先要进行的关键步骤是计算船舶行为的相似性,精确的距离计算方法对聚类结果有着至关重要的作用. ...
1
2004
... 船舶行为是指船舶在驾驶人员操纵下以航行、避让为主要目的行动方式和规律,通过对船舶行为的分析研究,可以掌握船舶在航行、操纵和避碰规律,为研究船舶交通理论、开发助航仪器、交通安全管理和规划提供依据[46].基于AIS数据的船舶行为航迹数据隐含着船舶行为的时空分布规律,需要运用数据挖掘中的无监督聚类分析方法挖掘隐含的规律特征,根据处理的AIS数据的结构特征的不同,在研究中可以分为船舶航迹点和航迹段的聚类,船舶轨迹段的聚类可以获得更加完整的船舶行为模式分布特征.在聚类挖掘中首先要进行的关键步骤是计算船舶行为的相似性,精确的距离计算方法对聚类结果有着至关重要的作用. ...
1
2014
... 船舶航迹聚类过程中首要的步骤是计算船舶轨迹之间的相似性,海域范围较小时,船舶轨迹点之间的可以用平面空间的欧式距离进行简单计算.当海域距离较远时,考虑纬度渐长现象,为了精确计算船舶航迹点之间的距离,需要用墨卡托算法或者中分纬度算法计算航迹点之间的球面距离[47].在船舶航迹段聚类的过程中,聚类算法处理的航迹段包括多个航迹点组成的航迹段之间的距离,除此以外,由于船舶航迹点还具备速度和方向,因而轨迹段聚类中的距离计算相对复杂. ...
1
2014
... 船舶航迹聚类过程中首要的步骤是计算船舶轨迹之间的相似性,海域范围较小时,船舶轨迹点之间的可以用平面空间的欧式距离进行简单计算.当海域距离较远时,考虑纬度渐长现象,为了精确计算船舶航迹点之间的距离,需要用墨卡托算法或者中分纬度算法计算航迹点之间的球面距离[47].在船舶航迹段聚类的过程中,聚类算法处理的航迹段包括多个航迹点组成的航迹段之间的距离,除此以外,由于船舶航迹点还具备速度和方向,因而轨迹段聚类中的距离计算相对复杂. ...
聚类算法综述
2
2019
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
聚类算法综述
2
2019
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于切比雪夫距离的密度计算与K-means的聚类方法研究
2
2019
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于切比雪夫距离的密度计算与K-means的聚类方法研究
2
2019
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
AIS trajectory simplification algorithm considering ship behaviours
2
2020
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
Maritime anomaly detection within coastal waters based on vessel trajectory clustering and Naïve Bayes Classifier
2
2017
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
船舶AIS轨迹快速自适应谱聚类算法
2
2018
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
船舶AIS轨迹快速自适应谱聚类算法
2
2018
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于改进谱聚类算法的航路辨识
2
2019
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于改进谱聚类算法的航路辨识
2
2019
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于行为特征相似度的船舶轨迹聚类方法
2
2019
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于行为特征相似度的船舶轨迹聚类方法
2
2019
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于聚类距离计算的船舶轨迹异常检测方法
2
2020
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于聚类距离计算的船舶轨迹异常检测方法
2
2020
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
An unsupervised learning method with convolutional auto-encoder for vessel trajectory similarity computation
2
2021
... 船舶轨迹点的相似性可以用欧式距离[48]和切比雪夫距离[49]进行计算,船舶轨迹段之间的距离计算方法有结构相似度距离[50]、Hauudorff距离[51,52]、动态时间弯矩距离[53]、基于行为特征的距离[54]、基于复合特征的距离[55]和深度卷积自编码[56]等船舶轨迹距离计算方法,其中基于深度卷积自编码的方法可以有效学习信息轨迹数据低维特征,为船舶航迹聚类提供相似性度量方法.轨迹相似性计算是船舶航迹聚类的前提条件,距离计算方法的选择对聚类的结果和精度有着重要影响,船舶航迹间距离的计算方法由基础的欧式距离、切比雪夫距离计算方法向着基于深度学习的方法趋势发展. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
一种基于k-means聚类的航运信息孤立点分析算法
2
2011
... 根据聚类方法的不同,船舶航迹点的聚类研究可以分为基于划分的聚类方法、基于密度的聚类方法、基于层次的聚类方法.基于划分的聚类方法主要包括k-means和k-mediods,通过定义AIS航运数据中孤立点的判断标准,k-means聚类可以实现多维数据异常点探测[57].k-mediods聚类可以实现航道内船舶AIS航迹点聚类,利用统计学中曲线拟合的最小二乘法对聚类后的轨迹点进行拟合[58],为船舶异常行为监测提供样本.基于密度的聚类方法主要是运用DBSCAN[59]和密度峰值快速搜索与聚类方法[60]对海域的船舶AIS轨迹点进行处理,得到海域的船舶轨迹的时空分布特征和船舶群体行为模式.基于层次的聚类算法的基本思想把初始船舶航迹点数据视为原子类,根据聚类的选择规则判断每1个原子类之间是否满足相似度选择条件,如符合,则把2个原子类归为一类,以新类替换原有船舶航迹点类,再次进行该分类过程,不停迭代该聚合过程,直至满足聚类停止条件形成船舶航迹点类.利用层次聚类可以实现自由航行海域的船舶行为特征模式的提取[61]和高碰撞危险的区域的识别[62].通过无监督的基于划分的聚类方法、基于密度的聚类方法和基于层次的聚类方法,可以从大量的船舶AIS数据中提取船舶航迹点空间分布模式和高风险区域,为海事安全监管提供基础数据. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
一种基于k-means聚类的航运信息孤立点分析算法
2
2011
... 根据聚类方法的不同,船舶航迹点的聚类研究可以分为基于划分的聚类方法、基于密度的聚类方法、基于层次的聚类方法.基于划分的聚类方法主要包括k-means和k-mediods,通过定义AIS航运数据中孤立点的判断标准,k-means聚类可以实现多维数据异常点探测[57].k-mediods聚类可以实现航道内船舶AIS航迹点聚类,利用统计学中曲线拟合的最小二乘法对聚类后的轨迹点进行拟合[58],为船舶异常行为监测提供样本.基于密度的聚类方法主要是运用DBSCAN[59]和密度峰值快速搜索与聚类方法[60]对海域的船舶AIS轨迹点进行处理,得到海域的船舶轨迹的时空分布特征和船舶群体行为模式.基于层次的聚类算法的基本思想把初始船舶航迹点数据视为原子类,根据聚类的选择规则判断每1个原子类之间是否满足相似度选择条件,如符合,则把2个原子类归为一类,以新类替换原有船舶航迹点类,再次进行该分类过程,不停迭代该聚合过程,直至满足聚类停止条件形成船舶航迹点类.利用层次聚类可以实现自由航行海域的船舶行为特征模式的提取[61]和高碰撞危险的区域的识别[62].通过无监督的基于划分的聚类方法、基于密度的聚类方法和基于层次的聚类方法,可以从大量的船舶AIS数据中提取船舶航迹点空间分布模式和高风险区域,为海事安全监管提供基础数据. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于统计学理论的船舶轨迹异常研究
2
2015
... 根据聚类方法的不同,船舶航迹点的聚类研究可以分为基于划分的聚类方法、基于密度的聚类方法、基于层次的聚类方法.基于划分的聚类方法主要包括k-means和k-mediods,通过定义AIS航运数据中孤立点的判断标准,k-means聚类可以实现多维数据异常点探测[57].k-mediods聚类可以实现航道内船舶AIS航迹点聚类,利用统计学中曲线拟合的最小二乘法对聚类后的轨迹点进行拟合[58],为船舶异常行为监测提供样本.基于密度的聚类方法主要是运用DBSCAN[59]和密度峰值快速搜索与聚类方法[60]对海域的船舶AIS轨迹点进行处理,得到海域的船舶轨迹的时空分布特征和船舶群体行为模式.基于层次的聚类算法的基本思想把初始船舶航迹点数据视为原子类,根据聚类的选择规则判断每1个原子类之间是否满足相似度选择条件,如符合,则把2个原子类归为一类,以新类替换原有船舶航迹点类,再次进行该分类过程,不停迭代该聚合过程,直至满足聚类停止条件形成船舶航迹点类.利用层次聚类可以实现自由航行海域的船舶行为特征模式的提取[61]和高碰撞危险的区域的识别[62].通过无监督的基于划分的聚类方法、基于密度的聚类方法和基于层次的聚类方法,可以从大量的船舶AIS数据中提取船舶航迹点空间分布模式和高风险区域,为海事安全监管提供基础数据. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于统计学理论的船舶轨迹异常研究
2
2015
... 根据聚类方法的不同,船舶航迹点的聚类研究可以分为基于划分的聚类方法、基于密度的聚类方法、基于层次的聚类方法.基于划分的聚类方法主要包括k-means和k-mediods,通过定义AIS航运数据中孤立点的判断标准,k-means聚类可以实现多维数据异常点探测[57].k-mediods聚类可以实现航道内船舶AIS航迹点聚类,利用统计学中曲线拟合的最小二乘法对聚类后的轨迹点进行拟合[58],为船舶异常行为监测提供样本.基于密度的聚类方法主要是运用DBSCAN[59]和密度峰值快速搜索与聚类方法[60]对海域的船舶AIS轨迹点进行处理,得到海域的船舶轨迹的时空分布特征和船舶群体行为模式.基于层次的聚类算法的基本思想把初始船舶航迹点数据视为原子类,根据聚类的选择规则判断每1个原子类之间是否满足相似度选择条件,如符合,则把2个原子类归为一类,以新类替换原有船舶航迹点类,再次进行该分类过程,不停迭代该聚合过程,直至满足聚类停止条件形成船舶航迹点类.利用层次聚类可以实现自由航行海域的船舶行为特征模式的提取[61]和高碰撞危险的区域的识别[62].通过无监督的基于划分的聚类方法、基于密度的聚类方法和基于层次的聚类方法,可以从大量的船舶AIS数据中提取船舶航迹点空间分布模式和高风险区域,为海事安全监管提供基础数据. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
Traffic Route Extraction and Anomaly Detection (TREAD): vessel pattern knowledge discovery and exploitation for maritime situational awareness
2
2013
... 根据聚类方法的不同,船舶航迹点的聚类研究可以分为基于划分的聚类方法、基于密度的聚类方法、基于层次的聚类方法.基于划分的聚类方法主要包括k-means和k-mediods,通过定义AIS航运数据中孤立点的判断标准,k-means聚类可以实现多维数据异常点探测[57].k-mediods聚类可以实现航道内船舶AIS航迹点聚类,利用统计学中曲线拟合的最小二乘法对聚类后的轨迹点进行拟合[58],为船舶异常行为监测提供样本.基于密度的聚类方法主要是运用DBSCAN[59]和密度峰值快速搜索与聚类方法[60]对海域的船舶AIS轨迹点进行处理,得到海域的船舶轨迹的时空分布特征和船舶群体行为模式.基于层次的聚类算法的基本思想把初始船舶航迹点数据视为原子类,根据聚类的选择规则判断每1个原子类之间是否满足相似度选择条件,如符合,则把2个原子类归为一类,以新类替换原有船舶航迹点类,再次进行该分类过程,不停迭代该聚合过程,直至满足聚类停止条件形成船舶航迹点类.利用层次聚类可以实现自由航行海域的船舶行为特征模式的提取[61]和高碰撞危险的区域的识别[62].通过无监督的基于划分的聚类方法、基于密度的聚类方法和基于层次的聚类方法,可以从大量的船舶AIS数据中提取船舶航迹点空间分布模式和高风险区域,为海事安全监管提供基础数据. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
密度峰值快速搜索与聚类算法及其在船舶位置数据分析中的应用
2
2018
... 根据聚类方法的不同,船舶航迹点的聚类研究可以分为基于划分的聚类方法、基于密度的聚类方法、基于层次的聚类方法.基于划分的聚类方法主要包括k-means和k-mediods,通过定义AIS航运数据中孤立点的判断标准,k-means聚类可以实现多维数据异常点探测[57].k-mediods聚类可以实现航道内船舶AIS航迹点聚类,利用统计学中曲线拟合的最小二乘法对聚类后的轨迹点进行拟合[58],为船舶异常行为监测提供样本.基于密度的聚类方法主要是运用DBSCAN[59]和密度峰值快速搜索与聚类方法[60]对海域的船舶AIS轨迹点进行处理,得到海域的船舶轨迹的时空分布特征和船舶群体行为模式.基于层次的聚类算法的基本思想把初始船舶航迹点数据视为原子类,根据聚类的选择规则判断每1个原子类之间是否满足相似度选择条件,如符合,则把2个原子类归为一类,以新类替换原有船舶航迹点类,再次进行该分类过程,不停迭代该聚合过程,直至满足聚类停止条件形成船舶航迹点类.利用层次聚类可以实现自由航行海域的船舶行为特征模式的提取[61]和高碰撞危险的区域的识别[62].通过无监督的基于划分的聚类方法、基于密度的聚类方法和基于层次的聚类方法,可以从大量的船舶AIS数据中提取船舶航迹点空间分布模式和高风险区域,为海事安全监管提供基础数据. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
密度峰值快速搜索与聚类算法及其在船舶位置数据分析中的应用
2
2018
... 根据聚类方法的不同,船舶航迹点的聚类研究可以分为基于划分的聚类方法、基于密度的聚类方法、基于层次的聚类方法.基于划分的聚类方法主要包括k-means和k-mediods,通过定义AIS航运数据中孤立点的判断标准,k-means聚类可以实现多维数据异常点探测[57].k-mediods聚类可以实现航道内船舶AIS航迹点聚类,利用统计学中曲线拟合的最小二乘法对聚类后的轨迹点进行拟合[58],为船舶异常行为监测提供样本.基于密度的聚类方法主要是运用DBSCAN[59]和密度峰值快速搜索与聚类方法[60]对海域的船舶AIS轨迹点进行处理,得到海域的船舶轨迹的时空分布特征和船舶群体行为模式.基于层次的聚类算法的基本思想把初始船舶航迹点数据视为原子类,根据聚类的选择规则判断每1个原子类之间是否满足相似度选择条件,如符合,则把2个原子类归为一类,以新类替换原有船舶航迹点类,再次进行该分类过程,不停迭代该聚合过程,直至满足聚类停止条件形成船舶航迹点类.利用层次聚类可以实现自由航行海域的船舶行为特征模式的提取[61]和高碰撞危险的区域的识别[62].通过无监督的基于划分的聚类方法、基于密度的聚类方法和基于层次的聚类方法,可以从大量的船舶AIS数据中提取船舶航迹点空间分布模式和高风险区域,为海事安全监管提供基础数据. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
自由航行海域船舶碰撞概率计算
2
2015
... 根据聚类方法的不同,船舶航迹点的聚类研究可以分为基于划分的聚类方法、基于密度的聚类方法、基于层次的聚类方法.基于划分的聚类方法主要包括k-means和k-mediods,通过定义AIS航运数据中孤立点的判断标准,k-means聚类可以实现多维数据异常点探测[57].k-mediods聚类可以实现航道内船舶AIS航迹点聚类,利用统计学中曲线拟合的最小二乘法对聚类后的轨迹点进行拟合[58],为船舶异常行为监测提供样本.基于密度的聚类方法主要是运用DBSCAN[59]和密度峰值快速搜索与聚类方法[60]对海域的船舶AIS轨迹点进行处理,得到海域的船舶轨迹的时空分布特征和船舶群体行为模式.基于层次的聚类算法的基本思想把初始船舶航迹点数据视为原子类,根据聚类的选择规则判断每1个原子类之间是否满足相似度选择条件,如符合,则把2个原子类归为一类,以新类替换原有船舶航迹点类,再次进行该分类过程,不停迭代该聚合过程,直至满足聚类停止条件形成船舶航迹点类.利用层次聚类可以实现自由航行海域的船舶行为特征模式的提取[61]和高碰撞危险的区域的识别[62].通过无监督的基于划分的聚类方法、基于密度的聚类方法和基于层次的聚类方法,可以从大量的船舶AIS数据中提取船舶航迹点空间分布模式和高风险区域,为海事安全监管提供基础数据. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
自由航行海域船舶碰撞概率计算
2
2015
... 根据聚类方法的不同,船舶航迹点的聚类研究可以分为基于划分的聚类方法、基于密度的聚类方法、基于层次的聚类方法.基于划分的聚类方法主要包括k-means和k-mediods,通过定义AIS航运数据中孤立点的判断标准,k-means聚类可以实现多维数据异常点探测[57].k-mediods聚类可以实现航道内船舶AIS航迹点聚类,利用统计学中曲线拟合的最小二乘法对聚类后的轨迹点进行拟合[58],为船舶异常行为监测提供样本.基于密度的聚类方法主要是运用DBSCAN[59]和密度峰值快速搜索与聚类方法[60]对海域的船舶AIS轨迹点进行处理,得到海域的船舶轨迹的时空分布特征和船舶群体行为模式.基于层次的聚类算法的基本思想把初始船舶航迹点数据视为原子类,根据聚类的选择规则判断每1个原子类之间是否满足相似度选择条件,如符合,则把2个原子类归为一类,以新类替换原有船舶航迹点类,再次进行该分类过程,不停迭代该聚合过程,直至满足聚类停止条件形成船舶航迹点类.利用层次聚类可以实现自由航行海域的船舶行为特征模式的提取[61]和高碰撞危险的区域的识别[62].通过无监督的基于划分的聚类方法、基于密度的聚类方法和基于层次的聚类方法,可以从大量的船舶AIS数据中提取船舶航迹点空间分布模式和高风险区域,为海事安全监管提供基础数据. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于层次聚类自动巡航的港区船舶碰撞危险识别方法研究
2
2017
... 根据聚类方法的不同,船舶航迹点的聚类研究可以分为基于划分的聚类方法、基于密度的聚类方法、基于层次的聚类方法.基于划分的聚类方法主要包括k-means和k-mediods,通过定义AIS航运数据中孤立点的判断标准,k-means聚类可以实现多维数据异常点探测[57].k-mediods聚类可以实现航道内船舶AIS航迹点聚类,利用统计学中曲线拟合的最小二乘法对聚类后的轨迹点进行拟合[58],为船舶异常行为监测提供样本.基于密度的聚类方法主要是运用DBSCAN[59]和密度峰值快速搜索与聚类方法[60]对海域的船舶AIS轨迹点进行处理,得到海域的船舶轨迹的时空分布特征和船舶群体行为模式.基于层次的聚类算法的基本思想把初始船舶航迹点数据视为原子类,根据聚类的选择规则判断每1个原子类之间是否满足相似度选择条件,如符合,则把2个原子类归为一类,以新类替换原有船舶航迹点类,再次进行该分类过程,不停迭代该聚合过程,直至满足聚类停止条件形成船舶航迹点类.利用层次聚类可以实现自由航行海域的船舶行为特征模式的提取[61]和高碰撞危险的区域的识别[62].通过无监督的基于划分的聚类方法、基于密度的聚类方法和基于层次的聚类方法,可以从大量的船舶AIS数据中提取船舶航迹点空间分布模式和高风险区域,为海事安全监管提供基础数据. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于层次聚类自动巡航的港区船舶碰撞危险识别方法研究
2
2017
... 根据聚类方法的不同,船舶航迹点的聚类研究可以分为基于划分的聚类方法、基于密度的聚类方法、基于层次的聚类方法.基于划分的聚类方法主要包括k-means和k-mediods,通过定义AIS航运数据中孤立点的判断标准,k-means聚类可以实现多维数据异常点探测[57].k-mediods聚类可以实现航道内船舶AIS航迹点聚类,利用统计学中曲线拟合的最小二乘法对聚类后的轨迹点进行拟合[58],为船舶异常行为监测提供样本.基于密度的聚类方法主要是运用DBSCAN[59]和密度峰值快速搜索与聚类方法[60]对海域的船舶AIS轨迹点进行处理,得到海域的船舶轨迹的时空分布特征和船舶群体行为模式.基于层次的聚类算法的基本思想把初始船舶航迹点数据视为原子类,根据聚类的选择规则判断每1个原子类之间是否满足相似度选择条件,如符合,则把2个原子类归为一类,以新类替换原有船舶航迹点类,再次进行该分类过程,不停迭代该聚合过程,直至满足聚类停止条件形成船舶航迹点类.利用层次聚类可以实现自由航行海域的船舶行为特征模式的提取[61]和高碰撞危险的区域的识别[62].通过无监督的基于划分的聚类方法、基于密度的聚类方法和基于层次的聚类方法,可以从大量的船舶AIS数据中提取船舶航迹点空间分布模式和高风险区域,为海事安全监管提供基础数据. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于AIS信息的船舶轨迹聚类模型及应用
2
2015
... (1)船舶交通行为模式的提取研究.根据研究方法可以分为基于密度聚类的方法[63]、基于层次聚类[64]、基于谱聚类[65]和拉普拉斯特征聚类[66]的方法.该系列方法分别可以实现港水域船舶典型的运动轨迹建模、自动航路设计和水上航行航路和船舶转向点的区域分布和船舶轨迹骨架线的聚类图. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于AIS信息的船舶轨迹聚类模型及应用
2
2015
... (1)船舶交通行为模式的提取研究.根据研究方法可以分为基于密度聚类的方法[63]、基于层次聚类[64]、基于谱聚类[65]和拉普拉斯特征聚类[66]的方法.该系列方法分别可以实现港水域船舶典型的运动轨迹建模、自动航路设计和水上航行航路和船舶转向点的区域分布和船舶轨迹骨架线的聚类图. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
分层建模的船舶轨迹快速聚类算法
2
2021
... (1)船舶交通行为模式的提取研究.根据研究方法可以分为基于密度聚类的方法[63]、基于层次聚类[64]、基于谱聚类[65]和拉普拉斯特征聚类[66]的方法.该系列方法分别可以实现港水域船舶典型的运动轨迹建模、自动航路设计和水上航行航路和船舶转向点的区域分布和船舶轨迹骨架线的聚类图. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
分层建模的船舶轨迹快速聚类算法
2
2021
... (1)船舶交通行为模式的提取研究.根据研究方法可以分为基于密度聚类的方法[63]、基于层次聚类[64]、基于谱聚类[65]和拉普拉斯特征聚类[66]的方法.该系列方法分别可以实现港水域船舶典型的运动轨迹建模、自动航路设计和水上航行航路和船舶转向点的区域分布和船舶轨迹骨架线的聚类图. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
仿射传播和谱聚类的船舶轨迹聚类
2
2018
... (1)船舶交通行为模式的提取研究.根据研究方法可以分为基于密度聚类的方法[63]、基于层次聚类[64]、基于谱聚类[65]和拉普拉斯特征聚类[66]的方法.该系列方法分别可以实现港水域船舶典型的运动轨迹建模、自动航路设计和水上航行航路和船舶转向点的区域分布和船舶轨迹骨架线的聚类图. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
仿射传播和谱聚类的船舶轨迹聚类
2
2018
... (1)船舶交通行为模式的提取研究.根据研究方法可以分为基于密度聚类的方法[63]、基于层次聚类[64]、基于谱聚类[65]和拉普拉斯特征聚类[66]的方法.该系列方法分别可以实现港水域船舶典型的运动轨迹建模、自动航路设计和水上航行航路和船舶转向点的区域分布和船舶轨迹骨架线的聚类图. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于骨架提取的船舶航迹聚类技术研究
2
2020
... (1)船舶交通行为模式的提取研究.根据研究方法可以分为基于密度聚类的方法[63]、基于层次聚类[64]、基于谱聚类[65]和拉普拉斯特征聚类[66]的方法.该系列方法分别可以实现港水域船舶典型的运动轨迹建模、自动航路设计和水上航行航路和船舶转向点的区域分布和船舶轨迹骨架线的聚类图. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于骨架提取的船舶航迹聚类技术研究
2
2020
... (1)船舶交通行为模式的提取研究.根据研究方法可以分为基于密度聚类的方法[63]、基于层次聚类[64]、基于谱聚类[65]和拉普拉斯特征聚类[66]的方法.该系列方法分别可以实现港水域船舶典型的运动轨迹建模、自动航路设计和水上航行航路和船舶转向点的区域分布和船舶轨迹骨架线的聚类图. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
A trajectory clustering method based on Douglas-Peucker compression and density for marine traffic pattern recognition
2
2019
... (2)船舶操纵行为特征的推断研究.该研究主要针对船舶轨迹数据量大、分布复杂的特点,运用基于DP压缩和DBSCAN的方法、基于多步子航迹聚类分析和随机邻居嵌入算法、概率图形模型的方法,得到港口及沿海水域的水上船舶操纵模式表征[67]、船舶操纵行为模式识别[68]和目标船操纵意图推断[69],为水域船舶航路规划、船舶航行指南建立和船舶安全航行决策提供参考依据.基于船舶轨迹聚类的船舶操纵行为推断实现了从数据到船舶行为的反演,该方法的精确程度取决于是否有足够的数据和精确的挖掘方法作为理论支撑. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
Ship-handling behavior pattern recognition using AIS sub-trajectory clustering analysis based on the T-SNE and spectral clustering algorithms
2
2020
... (2)船舶操纵行为特征的推断研究.该研究主要针对船舶轨迹数据量大、分布复杂的特点,运用基于DP压缩和DBSCAN的方法、基于多步子航迹聚类分析和随机邻居嵌入算法、概率图形模型的方法,得到港口及沿海水域的水上船舶操纵模式表征[67]、船舶操纵行为模式识别[68]和目标船操纵意图推断[69],为水域船舶航路规划、船舶航行指南建立和船舶安全航行决策提供参考依据.基于船舶轨迹聚类的船舶操纵行为推断实现了从数据到船舶行为的反演,该方法的精确程度取决于是否有足够的数据和精确的挖掘方法作为理论支撑. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
Intent Inference of Ship Collision Avoidance Behavior Under Maritime Traffic Rules
2
2021
... (2)船舶操纵行为特征的推断研究.该研究主要针对船舶轨迹数据量大、分布复杂的特点,运用基于DP压缩和DBSCAN的方法、基于多步子航迹聚类分析和随机邻居嵌入算法、概率图形模型的方法,得到港口及沿海水域的水上船舶操纵模式表征[67]、船舶操纵行为模式识别[68]和目标船操纵意图推断[69],为水域船舶航路规划、船舶航行指南建立和船舶安全航行决策提供参考依据.基于船舶轨迹聚类的船舶操纵行为推断实现了从数据到船舶行为的反演,该方法的精确程度取决于是否有足够的数据和精确的挖掘方法作为理论支撑. ...
... Summary of research contents and methods of ship behavior clustering
Tab. 2 | 研究主题 | 研究内容 | 研究方法及模型 |
| 船舶航迹距离计算 | 船舶轨迹点间距离计算 | 欧式距离[48]、切比雪夫距离[49]计算方法 |
| 船舶轨迹段间距离计算 | 结构相似度[50]、Hauudorff[51,52]、动态时间弯矩[53]、基于行为特征的方法[54]、基于复合特征的方法[55]、无监督深度学习[56]等距离计算方法 |
| 船舶航迹点聚类 | 基于划分的船舶轨迹点聚类 | k-means[57]、k-mediods[58] |
| 基于密度的船舶轨迹点聚类 | DBSCAN[59]、密度峰值快速搜索与聚类方法[60] |
| 基于层次的船舶轨迹点聚类 | AGNES层次聚类方法[61,62] |
| 船舶航迹段聚类 | 船舶交通行为模式的提取 | 密度聚类[63]、层次聚类[64]、谱聚类[65,66]、拉普拉斯特征聚类[5]方法 |
| 船舶操纵行为特征的推断 | 结合DP和DBSCAN的聚类方法[67]、多步子航迹聚类分析和随机邻居嵌入算法[68]、概率图形模型[69] |
通过对船舶行为聚类研究的总结分析和表2的内容可以看出: ...
基于语义的船舶行为动态推理机制
1
2019
... (4)船舶航行行为聚类研究对于水上船舶交通模式辨识、交通流特征挖掘、船舶典型航行行为建模和航路规划具有重要的理论意义,在聚类的过程中如何考虑船舶航迹段包括的空间、时间和方向特征的距离计算方法有待进一步优化,在此基础上设计合适的聚类算法和聚类参数的自适应选取有待深入研究,最终实现船舶行为的高效聚类.除了现有的基于船舶轨迹的船舶行为模式发现技术外,自然语言处理领域中语义建模和空间拓扑技术[70,71,72]可以对船舶行为进行建模研究,为船舶轨迹中的隐含行为模式发现提供新的方法. ...
基于语义的船舶行为动态推理机制
1
2019
... (4)船舶航行行为聚类研究对于水上船舶交通模式辨识、交通流特征挖掘、船舶典型航行行为建模和航路规划具有重要的理论意义,在聚类的过程中如何考虑船舶航迹段包括的空间、时间和方向特征的距离计算方法有待进一步优化,在此基础上设计合适的聚类算法和聚类参数的自适应选取有待深入研究,最终实现船舶行为的高效聚类.除了现有的基于船舶轨迹的船舶行为模式发现技术外,自然语言处理领域中语义建模和空间拓扑技术[70,71,72]可以对船舶行为进行建模研究,为船舶轨迹中的隐含行为模式发现提供新的方法. ...
Mobility pattern analysis of ship trajectories based on semantic transformation and topic model
1
2020
... (4)船舶航行行为聚类研究对于水上船舶交通模式辨识、交通流特征挖掘、船舶典型航行行为建模和航路规划具有重要的理论意义,在聚类的过程中如何考虑船舶航迹段包括的空间、时间和方向特征的距离计算方法有待进一步优化,在此基础上设计合适的聚类算法和聚类参数的自适应选取有待深入研究,最终实现船舶行为的高效聚类.除了现有的基于船舶轨迹的船舶行为模式发现技术外,自然语言处理领域中语义建模和空间拓扑技术[70,71,72]可以对船舶行为进行建模研究,为船舶轨迹中的隐含行为模式发现提供新的方法. ...
船舶行为的语义建模与表达
1
2021
... (4)船舶航行行为聚类研究对于水上船舶交通模式辨识、交通流特征挖掘、船舶典型航行行为建模和航路规划具有重要的理论意义,在聚类的过程中如何考虑船舶航迹段包括的空间、时间和方向特征的距离计算方法有待进一步优化,在此基础上设计合适的聚类算法和聚类参数的自适应选取有待深入研究,最终实现船舶行为的高效聚类.除了现有的基于船舶轨迹的船舶行为模式发现技术外,自然语言处理领域中语义建模和空间拓扑技术[70,71,72]可以对船舶行为进行建模研究,为船舶轨迹中的隐含行为模式发现提供新的方法. ...
船舶行为的语义建模与表达
1
2021
... (4)船舶航行行为聚类研究对于水上船舶交通模式辨识、交通流特征挖掘、船舶典型航行行为建模和航路规划具有重要的理论意义,在聚类的过程中如何考虑船舶航迹段包括的空间、时间和方向特征的距离计算方法有待进一步优化,在此基础上设计合适的聚类算法和聚类参数的自适应选取有待深入研究,最终实现船舶行为的高效聚类.除了现有的基于船舶轨迹的船舶行为模式发现技术外,自然语言处理领域中语义建模和空间拓扑技术[70,71,72]可以对船舶行为进行建模研究,为船舶轨迹中的隐含行为模式发现提供新的方法. ...
Statistical Analysis of Motion Patterns in AIS Data: Anomaly detection and Motion Prediction
2
2008
... 基于动力学方程的预测方法需要是在船舶的操纵性参数和航迹推算的基础上,运用高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79]建立船舶行为的动力学方程,进行船舶行为的预测.该系列方法是基于物理建模的思想,保证船舶行为预测具有较好精度的前提是预测者需要掌握预测船舶的操船指数和性能,如果无法获得船舶的物理参数,就需要运用基于神经网络的智能算法进行船舶行为预测. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于卡尔曼滤波算法船舶AIS轨迹估计研究
2
2014
... 基于动力学方程的预测方法需要是在船舶的操纵性参数和航迹推算的基础上,运用高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79]建立船舶行为的动力学方程,进行船舶行为的预测.该系列方法是基于物理建模的思想,保证船舶行为预测具有较好精度的前提是预测者需要掌握预测船舶的操船指数和性能,如果无法获得船舶的物理参数,就需要运用基于神经网络的智能算法进行船舶行为预测. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于卡尔曼滤波算法船舶AIS轨迹估计研究
2
2014
... 基于动力学方程的预测方法需要是在船舶的操纵性参数和航迹推算的基础上,运用高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79]建立船舶行为的动力学方程,进行船舶行为的预测.该系列方法是基于物理建模的思想,保证船舶行为预测具有较好精度的前提是预测者需要掌握预测船舶的操船指数和性能,如果无法获得船舶的物理参数,就需要运用基于神经网络的智能算法进行船舶行为预测. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于多项式卡尔曼滤波的船舶轨迹预测算法
2
2019
... 基于动力学方程的预测方法需要是在船舶的操纵性参数和航迹推算的基础上,运用高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79]建立船舶行为的动力学方程,进行船舶行为的预测.该系列方法是基于物理建模的思想,保证船舶行为预测具有较好精度的前提是预测者需要掌握预测船舶的操船指数和性能,如果无法获得船舶的物理参数,就需要运用基于神经网络的智能算法进行船舶行为预测. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于多项式卡尔曼滤波的船舶轨迹预测算法
2
2019
... 基于动力学方程的预测方法需要是在船舶的操纵性参数和航迹推算的基础上,运用高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79]建立船舶行为的动力学方程,进行船舶行为的预测.该系列方法是基于物理建模的思想,保证船舶行为预测具有较好精度的前提是预测者需要掌握预测船舶的操船指数和性能,如果无法获得船舶的物理参数,就需要运用基于神经网络的智能算法进行船舶行为预测. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
Maritime traffic monitoring based on vessel detection, tracking, state estimation, and trajectory prediction
2
2012
... 基于动力学方程的预测方法需要是在船舶的操纵性参数和航迹推算的基础上,运用高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79]建立船舶行为的动力学方程,进行船舶行为的预测.该系列方法是基于物理建模的思想,保证船舶行为预测具有较好精度的前提是预测者需要掌握预测船舶的操船指数和性能,如果无法获得船舶的物理参数,就需要运用基于神经网络的智能算法进行船舶行为预测. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
Vessel trajectory prediction in curving channel of inland river
2
2015
... 基于动力学方程的预测方法需要是在船舶的操纵性参数和航迹推算的基础上,运用高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79]建立船舶行为的动力学方程,进行船舶行为的预测.该系列方法是基于物理建模的思想,保证船舶行为预测具有较好精度的前提是预测者需要掌握预测船舶的操船指数和性能,如果无法获得船舶的物理参数,就需要运用基于神经网络的智能算法进行船舶行为预测. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
Ship Motion trajectory and prediction based on vector analysis
2
2020
... 基于动力学方程的预测方法需要是在船舶的操纵性参数和航迹推算的基础上,运用高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79]建立船舶行为的动力学方程,进行船舶行为的预测.该系列方法是基于物理建模的思想,保证船舶行为预测具有较好精度的前提是预测者需要掌握预测船舶的操船指数和性能,如果无法获得船舶的物理参数,就需要运用基于神经网络的智能算法进行船舶行为预测. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
船舶航行轨迹预测的数学模型设计
2
2020
... 基于动力学方程的预测方法需要是在船舶的操纵性参数和航迹推算的基础上,运用高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79]建立船舶行为的动力学方程,进行船舶行为的预测.该系列方法是基于物理建模的思想,保证船舶行为预测具有较好精度的前提是预测者需要掌握预测船舶的操船指数和性能,如果无法获得船舶的物理参数,就需要运用基于神经网络的智能算法进行船舶行为预测. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
船舶航行轨迹预测的数学模型设计
2
2020
... 基于动力学方程的预测方法需要是在船舶的操纵性参数和航迹推算的基础上,运用高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79]建立船舶行为的动力学方程,进行船舶行为的预测.该系列方法是基于物理建模的思想,保证船舶行为预测具有较好精度的前提是预测者需要掌握预测船舶的操船指数和性能,如果无法获得船舶的物理参数,就需要运用基于神经网络的智能算法进行船舶行为预测. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于BP神经网络的船舶航迹实时预测
2
2012
... 在基于船舶动力学方程船舶行为预测的基础上,一些学者利用传统的神经网络具备的非线性拟合和特征学习的优势,进行了基于传统智能算法的船舶行为预测研究.根据采用研究方法分为BP(Back Propagation)神经网络[80,81,82]、k-最近邻方法[83]、支持向量机[84]等方法.通过以船舶AIS数据中的船舶航向、航速作为输入,经度差、纬度作为输出来神经训练网络参数,实现船舶位置的预测,例如:将(t-1)时刻船舶经纬度、航迹和航向的4维向量作为输入,以(t)、(t+1)和(t+2)的3个时刻的经纬度、航迹和航向的12维向量作为输出,设计了船舶行为预测的多维神经网络模型[81].针对船舶航艏向在零度附近变动时带来的实际方向变动幅度与数据变化幅度存在不一致的问题,在BP神经网络基础上,引入双三角函数变换,同时将正弦值与余弦值纳入模型,构建一种基于改进神经网络算法的船舶AIS轨迹预测模型,提高了航迹预测模型适用的范 围[82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于BP神经网络的船舶航迹实时预测
2
2012
... 在基于船舶动力学方程船舶行为预测的基础上,一些学者利用传统的神经网络具备的非线性拟合和特征学习的优势,进行了基于传统智能算法的船舶行为预测研究.根据采用研究方法分为BP(Back Propagation)神经网络[80,81,82]、k-最近邻方法[83]、支持向量机[84]等方法.通过以船舶AIS数据中的船舶航向、航速作为输入,经度差、纬度作为输出来神经训练网络参数,实现船舶位置的预测,例如:将(t-1)时刻船舶经纬度、航迹和航向的4维向量作为输入,以(t)、(t+1)和(t+2)的3个时刻的经纬度、航迹和航向的12维向量作为输出,设计了船舶行为预测的多维神经网络模型[81].针对船舶航艏向在零度附近变动时带来的实际方向变动幅度与数据变化幅度存在不一致的问题,在BP神经网络基础上,引入双三角函数变换,同时将正弦值与余弦值纳入模型,构建一种基于改进神经网络算法的船舶AIS轨迹预测模型,提高了航迹预测模型适用的范 围[82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于AIS信息和BP神经网络的船舶航行行为预测
3
2017
... 在基于船舶动力学方程船舶行为预测的基础上,一些学者利用传统的神经网络具备的非线性拟合和特征学习的优势,进行了基于传统智能算法的船舶行为预测研究.根据采用研究方法分为BP(Back Propagation)神经网络[80,81,82]、k-最近邻方法[83]、支持向量机[84]等方法.通过以船舶AIS数据中的船舶航向、航速作为输入,经度差、纬度作为输出来神经训练网络参数,实现船舶位置的预测,例如:将(t-1)时刻船舶经纬度、航迹和航向的4维向量作为输入,以(t)、(t+1)和(t+2)的3个时刻的经纬度、航迹和航向的12维向量作为输出,设计了船舶行为预测的多维神经网络模型[81].针对船舶航艏向在零度附近变动时带来的实际方向变动幅度与数据变化幅度存在不一致的问题,在BP神经网络基础上,引入双三角函数变换,同时将正弦值与余弦值纳入模型,构建一种基于改进神经网络算法的船舶AIS轨迹预测模型,提高了航迹预测模型适用的范 围[82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... [81].针对船舶航艏向在零度附近变动时带来的实际方向变动幅度与数据变化幅度存在不一致的问题,在BP神经网络基础上,引入双三角函数变换,同时将正弦值与余弦值纳入模型,构建一种基于改进神经网络算法的船舶AIS轨迹预测模型,提高了航迹预测模型适用的范 围[82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于AIS信息和BP神经网络的船舶航行行为预测
3
2017
... 在基于船舶动力学方程船舶行为预测的基础上,一些学者利用传统的神经网络具备的非线性拟合和特征学习的优势,进行了基于传统智能算法的船舶行为预测研究.根据采用研究方法分为BP(Back Propagation)神经网络[80,81,82]、k-最近邻方法[83]、支持向量机[84]等方法.通过以船舶AIS数据中的船舶航向、航速作为输入,经度差、纬度作为输出来神经训练网络参数,实现船舶位置的预测,例如:将(t-1)时刻船舶经纬度、航迹和航向的4维向量作为输入,以(t)、(t+1)和(t+2)的3个时刻的经纬度、航迹和航向的12维向量作为输出,设计了船舶行为预测的多维神经网络模型[81].针对船舶航艏向在零度附近变动时带来的实际方向变动幅度与数据变化幅度存在不一致的问题,在BP神经网络基础上,引入双三角函数变换,同时将正弦值与余弦值纳入模型,构建一种基于改进神经网络算法的船舶AIS轨迹预测模型,提高了航迹预测模型适用的范 围[82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... [81].针对船舶航艏向在零度附近变动时带来的实际方向变动幅度与数据变化幅度存在不一致的问题,在BP神经网络基础上,引入双三角函数变换,同时将正弦值与余弦值纳入模型,构建一种基于改进神经网络算法的船舶AIS轨迹预测模型,提高了航迹预测模型适用的范 围[82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
考虑航艏向与数据变化差异的船舶轨迹预测
3
2021
... 在基于船舶动力学方程船舶行为预测的基础上,一些学者利用传统的神经网络具备的非线性拟合和特征学习的优势,进行了基于传统智能算法的船舶行为预测研究.根据采用研究方法分为BP(Back Propagation)神经网络[80,81,82]、k-最近邻方法[83]、支持向量机[84]等方法.通过以船舶AIS数据中的船舶航向、航速作为输入,经度差、纬度作为输出来神经训练网络参数,实现船舶位置的预测,例如:将(t-1)时刻船舶经纬度、航迹和航向的4维向量作为输入,以(t)、(t+1)和(t+2)的3个时刻的经纬度、航迹和航向的12维向量作为输出,设计了船舶行为预测的多维神经网络模型[81].针对船舶航艏向在零度附近变动时带来的实际方向变动幅度与数据变化幅度存在不一致的问题,在BP神经网络基础上,引入双三角函数变换,同时将正弦值与余弦值纳入模型,构建一种基于改进神经网络算法的船舶AIS轨迹预测模型,提高了航迹预测模型适用的范 围[82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... [82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
考虑航艏向与数据变化差异的船舶轨迹预测
3
2021
... 在基于船舶动力学方程船舶行为预测的基础上,一些学者利用传统的神经网络具备的非线性拟合和特征学习的优势,进行了基于传统智能算法的船舶行为预测研究.根据采用研究方法分为BP(Back Propagation)神经网络[80,81,82]、k-最近邻方法[83]、支持向量机[84]等方法.通过以船舶AIS数据中的船舶航向、航速作为输入,经度差、纬度作为输出来神经训练网络参数,实现船舶位置的预测,例如:将(t-1)时刻船舶经纬度、航迹和航向的4维向量作为输入,以(t)、(t+1)和(t+2)的3个时刻的经纬度、航迹和航向的12维向量作为输出,设计了船舶行为预测的多维神经网络模型[81].针对船舶航艏向在零度附近变动时带来的实际方向变动幅度与数据变化幅度存在不一致的问题,在BP神经网络基础上,引入双三角函数变换,同时将正弦值与余弦值纳入模型,构建一种基于改进神经网络算法的船舶AIS轨迹预测模型,提高了航迹预测模型适用的范 围[82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... [82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
2
2018
... 在基于船舶动力学方程船舶行为预测的基础上,一些学者利用传统的神经网络具备的非线性拟合和特征学习的优势,进行了基于传统智能算法的船舶行为预测研究.根据采用研究方法分为BP(Back Propagation)神经网络[80,81,82]、k-最近邻方法[83]、支持向量机[84]等方法.通过以船舶AIS数据中的船舶航向、航速作为输入,经度差、纬度作为输出来神经训练网络参数,实现船舶位置的预测,例如:将(t-1)时刻船舶经纬度、航迹和航向的4维向量作为输入,以(t)、(t+1)和(t+2)的3个时刻的经纬度、航迹和航向的12维向量作为输出,设计了船舶行为预测的多维神经网络模型[81].针对船舶航艏向在零度附近变动时带来的实际方向变动幅度与数据变化幅度存在不一致的问题,在BP神经网络基础上,引入双三角函数变换,同时将正弦值与余弦值纳入模型,构建一种基于改进神经网络算法的船舶AIS轨迹预测模型,提高了航迹预测模型适用的范 围[82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于DE-SVM的船舶航迹预测模型
3
2020
... 在基于船舶动力学方程船舶行为预测的基础上,一些学者利用传统的神经网络具备的非线性拟合和特征学习的优势,进行了基于传统智能算法的船舶行为预测研究.根据采用研究方法分为BP(Back Propagation)神经网络[80,81,82]、k-最近邻方法[83]、支持向量机[84]等方法.通过以船舶AIS数据中的船舶航向、航速作为输入,经度差、纬度作为输出来神经训练网络参数,实现船舶位置的预测,例如:将(t-1)时刻船舶经纬度、航迹和航向的4维向量作为输入,以(t)、(t+1)和(t+2)的3个时刻的经纬度、航迹和航向的12维向量作为输出,设计了船舶行为预测的多维神经网络模型[81].针对船舶航艏向在零度附近变动时带来的实际方向变动幅度与数据变化幅度存在不一致的问题,在BP神经网络基础上,引入双三角函数变换,同时将正弦值与余弦值纳入模型,构建一种基于改进神经网络算法的船舶AIS轨迹预测模型,提高了航迹预测模型适用的范 围[82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... [84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于DE-SVM的船舶航迹预测模型
3
2020
... 在基于船舶动力学方程船舶行为预测的基础上,一些学者利用传统的神经网络具备的非线性拟合和特征学习的优势,进行了基于传统智能算法的船舶行为预测研究.根据采用研究方法分为BP(Back Propagation)神经网络[80,81,82]、k-最近邻方法[83]、支持向量机[84]等方法.通过以船舶AIS数据中的船舶航向、航速作为输入,经度差、纬度作为输出来神经训练网络参数,实现船舶位置的预测,例如:将(t-1)时刻船舶经纬度、航迹和航向的4维向量作为输入,以(t)、(t+1)和(t+2)的3个时刻的经纬度、航迹和航向的12维向量作为输出,设计了船舶行为预测的多维神经网络模型[81].针对船舶航艏向在零度附近变动时带来的实际方向变动幅度与数据变化幅度存在不一致的问题,在BP神经网络基础上,引入双三角函数变换,同时将正弦值与余弦值纳入模型,构建一种基于改进神经网络算法的船舶AIS轨迹预测模型,提高了航迹预测模型适用的范 围[82].刘娇等[84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... [84]提出一种基于支持向量机的航迹预测模型,采用差分进化算法对模型内部参数寻优以提高模型收敛速度和预测精度,与基于BP神经网络的航迹预测模型的仿真结果比较,该方法具有更好的收敛性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
Online prediction of ship behavior with automatic identification system sensor data using bidirectional long short-term memory recurrent neural network
2
2018
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于AIS数据和LSTM网络的船舶航行动态预测
2
2019
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于AIS数据和LSTM网络的船舶航行动态预测
2
2019
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于循环神经网络的船舶航迹预测
2
2020
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于循环神经网络的船舶航迹预测
2
2020
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
LSTM网络在船舶航行轨迹预测中的应用
2
2021
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
LSTM网络在船舶航行轨迹预测中的应用
2
2021
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
A ship trajectory prediction framework based on a recurrent neural network
2
2020
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于Attenton-LSTM神经网络的船舶航行预测
2
2019
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于Attenton-LSTM神经网络的船舶航行预测
2
2019
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于生成对抗网络的船舶航迹预测模型
2
2021
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于生成对抗网络的船舶航迹预测模型
2
2021
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于改进Seq2Seq的短时AIS轨迹序列预测模型
3
2020
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... [92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于改进Seq2Seq的短时AIS轨迹序列预测模型
3
2020
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... [92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
The ship movement trajectory prediction algorithm using navigational data fusion
1
2017
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
A bi-directional LSTM ship rrajectory prediction method based on attention mechanism
1
2021
... 在传统智能算法的基础上,采用深度循环神经网络对船舶行为进行预测是当下的研究趋势.根据研究方法可以分为基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]和混合神经网络的方法[93].该系列方法将长短期记忆(Long Short Term Memory,LSTM)和门循环单元(Gated Recurrent Unit, GRU)神经网络应用到船舶航行动态预测,将AIS数据转化为航行动态时间序列数据用于LSTM网络的训练和测试,相比BP神经网络,LSTM和GRU网络预测的准确性更高.在此基础上,一些学者利用改进Seq2Seq的短时AIS轨迹序列预测模型[92]、基于LSTM自编码、注意机制和双向LSTM结构集成模型[94],通过使用门控循环单元网络和混合神经网络等融合方法预测船舶轨迹的时空序列.该方法相比传统的LSTM该方法的精确性更好,需要对大量的船舶航迹数据进行充分训练,网络模型的训练需要更长的时间,以保证模型网络的泛化性能. ...
A ship movement classification based on Automatic Identification System (AIS) data using Convolutional Neural Network
2
2020
... 随着深度卷积神经网络(Convolutional Neural Networks, CNN)在图像识别和分类领域的广泛研究应用,CNN及其与其他方法组合的方法也被运用到船舶行为分类的研究中.基于CNN的方法是将有标签的船舶AIS轨迹转换为不同类型的运动图像,充分利用CNN的分类能力实现船舶类型的分类[95];基于多尺度CNN和LSTM的船舶行为识别网络[96]可以实现正常航行、捕鱼、抛锚、系泊四个渔船行为类别的预测.根据船舶AIS数据构建的会遇船舶碰撞风险图像,CNN实现船舶会遇场景碰撞风险等级分类[97].针对AIS数据的不平衡性使得在不同类型船舶存在的情况下很难取得令人满意的分类结果,Liang等[98]提出了一种多视图特征融合网络,该方法实现了不平衡AIS数据下船舶类型的精确分类. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于多尺度卷积的船舶行为识别方法
2
2019
... 随着深度卷积神经网络(Convolutional Neural Networks, CNN)在图像识别和分类领域的广泛研究应用,CNN及其与其他方法组合的方法也被运用到船舶行为分类的研究中.基于CNN的方法是将有标签的船舶AIS轨迹转换为不同类型的运动图像,充分利用CNN的分类能力实现船舶类型的分类[95];基于多尺度CNN和LSTM的船舶行为识别网络[96]可以实现正常航行、捕鱼、抛锚、系泊四个渔船行为类别的预测.根据船舶AIS数据构建的会遇船舶碰撞风险图像,CNN实现船舶会遇场景碰撞风险等级分类[97].针对AIS数据的不平衡性使得在不同类型船舶存在的情况下很难取得令人满意的分类结果,Liang等[98]提出了一种多视图特征融合网络,该方法实现了不平衡AIS数据下船舶类型的精确分类. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
基于多尺度卷积的船舶行为识别方法
2
2019
... 随着深度卷积神经网络(Convolutional Neural Networks, CNN)在图像识别和分类领域的广泛研究应用,CNN及其与其他方法组合的方法也被运用到船舶行为分类的研究中.基于CNN的方法是将有标签的船舶AIS轨迹转换为不同类型的运动图像,充分利用CNN的分类能力实现船舶类型的分类[95];基于多尺度CNN和LSTM的船舶行为识别网络[96]可以实现正常航行、捕鱼、抛锚、系泊四个渔船行为类别的预测.根据船舶AIS数据构建的会遇船舶碰撞风险图像,CNN实现船舶会遇场景碰撞风险等级分类[97].针对AIS数据的不平衡性使得在不同类型船舶存在的情况下很难取得令人满意的分类结果,Liang等[98]提出了一种多视图特征融合网络,该方法实现了不平衡AIS数据下船舶类型的精确分类. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
Towards a convolutional neural network model for classifying regional ship collision risk levels for waterway risk analysis
2
2020
... 随着深度卷积神经网络(Convolutional Neural Networks, CNN)在图像识别和分类领域的广泛研究应用,CNN及其与其他方法组合的方法也被运用到船舶行为分类的研究中.基于CNN的方法是将有标签的船舶AIS轨迹转换为不同类型的运动图像,充分利用CNN的分类能力实现船舶类型的分类[95];基于多尺度CNN和LSTM的船舶行为识别网络[96]可以实现正常航行、捕鱼、抛锚、系泊四个渔船行为类别的预测.根据船舶AIS数据构建的会遇船舶碰撞风险图像,CNN实现船舶会遇场景碰撞风险等级分类[97].针对AIS数据的不平衡性使得在不同类型船舶存在的情况下很难取得令人满意的分类结果,Liang等[98]提出了一种多视图特征融合网络,该方法实现了不平衡AIS数据下船舶类型的精确分类. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...
MVFFNet: Multi-View Feature Fusion Network for Imbalanced Ship Classification
2
2021
... 随着深度卷积神经网络(Convolutional Neural Networks, CNN)在图像识别和分类领域的广泛研究应用,CNN及其与其他方法组合的方法也被运用到船舶行为分类的研究中.基于CNN的方法是将有标签的船舶AIS轨迹转换为不同类型的运动图像,充分利用CNN的分类能力实现船舶类型的分类[95];基于多尺度CNN和LSTM的船舶行为识别网络[96]可以实现正常航行、捕鱼、抛锚、系泊四个渔船行为类别的预测.根据船舶AIS数据构建的会遇船舶碰撞风险图像,CNN实现船舶会遇场景碰撞风险等级分类[97].针对AIS数据的不平衡性使得在不同类型船舶存在的情况下很难取得令人满意的分类结果,Liang等[98]提出了一种多视图特征融合网络,该方法实现了不平衡AIS数据下船舶类型的精确分类. ...
... Research summary of ship behavior prediction
Tab. 3 | 研究内容 | 研究方法及模型 |
| 基于动力学方程船舶行为预测 | 高斯跟踪滤波[73]、卡尔曼滤波[74,75,76]、灰色预测[77]、矢量分析[78]和惯性定位原理方法[79] |
| 基于传统智能算法的船舶行为预测 | BP神经网络方法[80,81,82]、k-最近邻方法[83]、支持向量机[84]方法 |
| 基于深度循环神经网络船舶行为预测 | 基于长短期记忆[85,86,87,88]、门循环单元[89]、注意力机制[90]、生成对抗网络[91]、改进Seq2Seq[92]神经网络方法 |
| 基于深度卷积神经网络的船舶行为预测 | CNN[95]、CNN+LSTM[96,97]、多视图特征融合网络方法[98] |
通过对以往船舶行为预测研究的总结分析和表3的内容可以看出: ...


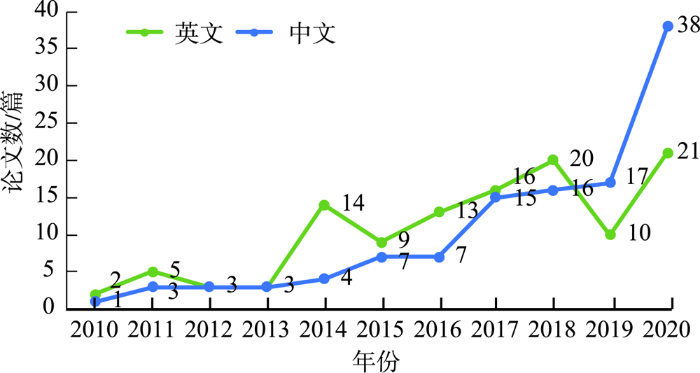
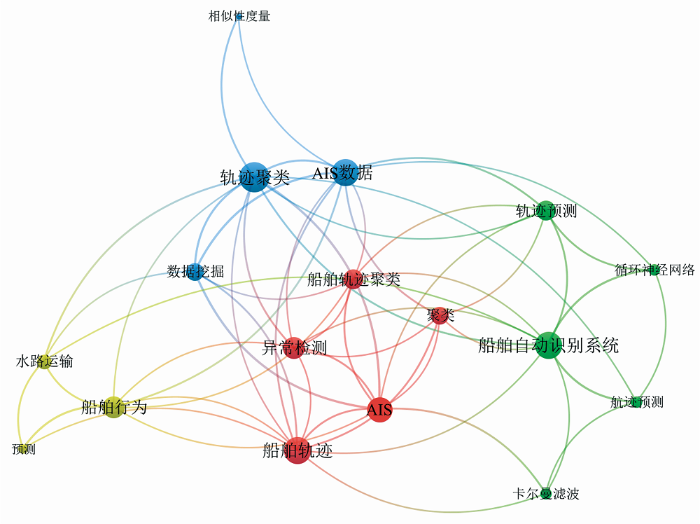
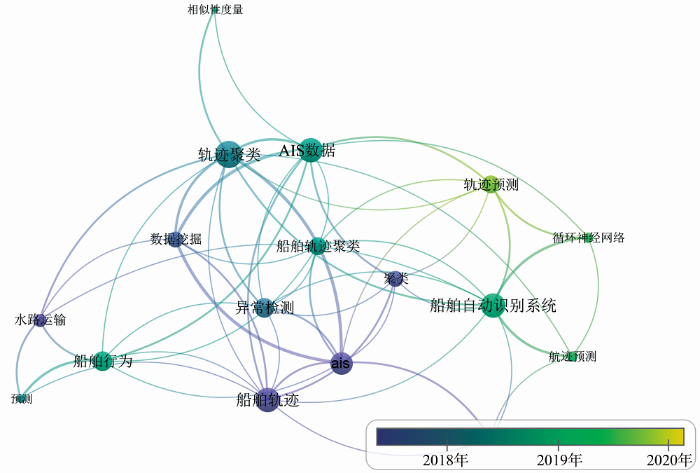
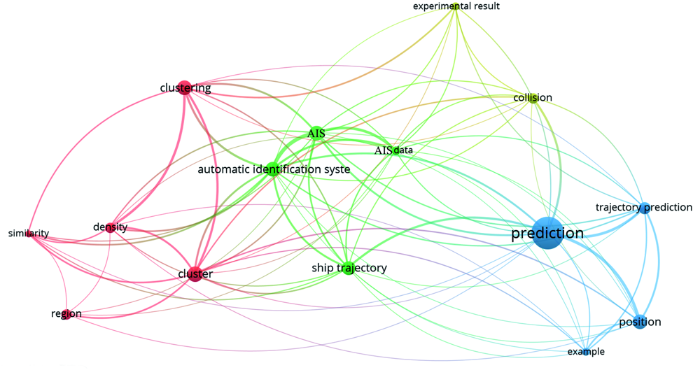
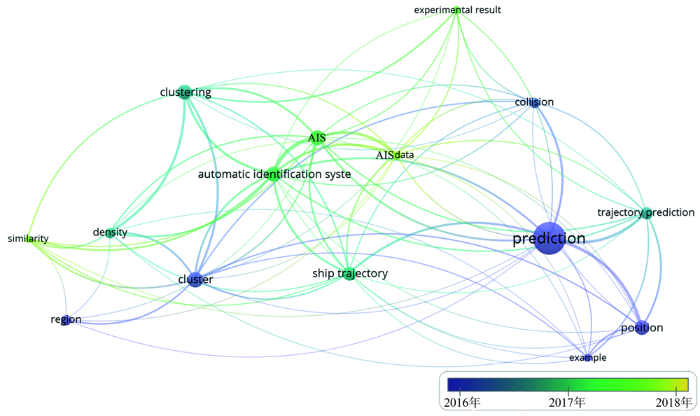

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}