1 引言
对地观测技术是获取地理空间信息的重要手段[1 ] ,现已进入多平台和多传感器发展阶段,并主要依托天基和空基对地观测平台实现。天基对地观测平台(如遥感卫星等)具有宏观视野,可实现全球覆盖,但受环境因素影响较大,且难以对特定区域及时连续观测[2 -3 ] ;空基观测平台(如遥感无人机)具有高频次、高性价比等特点,能够较容易地获取厘米级甚至是毫米级数据[4 ] ,且可同时保证较高的空间和时间分辨率[5 ] 。天基和空基对地观测平台的不同特点催生了空天协同对地观测技术的发展,通过对地观测平台的广域部署、全域探测、快速响应和多元互补[6 ] ,提升获取数据的空间分辨率、时间分辨率以及覆盖范围[7 ] 。
对空天协同对地观测进行建模,并获取对地观测平台的运行状态、观测效能、关联关系等方面的语义信息对决策制定、任务规划等活动至关重要。地理空间传感网(Geospatial Sensor Web,GSW)作为一种新的时空信息基础设施,能够管理、集成和共享各种传感器资源,并为多平台协同观测提供支持[8 ] ,由此也产生了一系列研究成果,包括用于卫星传感器评估的传感器静态能力检索(Sensor Static Capability Index,SSCI)[9 ] 和动态观测能力检索 (Dynamic Observation Capability Index,DOCI)[10 ] 以及能够描述各类异构传感器的地理空间传感网原型系统,如GeoSensor[11 ] 、GeoCENS[12 ] 等。为了实现对地观测异构传感器网络连接和资源共享,开放地理空间信息联盟(Open Geospatial Consortium,OGC)建立了专门面向各类传感器的网络整合框架(Sensor Web Enablement,SWE),实现传感器资源的注册、查找、应用及观测数据的订阅和发布[7 ] 。SWE包括一系列信息和功能模型,如为描述传感器和传感器观测处理方法提供通用模型和编码结构的传感器建模语言(Sensor Model Language,SensorML)、为传感器调度提供各类信息的传感器调度服务(Sensor Planning Service,SPS)、辅助获取传感测量数据以及传感系统信息的传感器观测服务(Sensor Observation Service,SOS)等。
综合上述研究,目前主要集中于某一类型对地观测平台的属性信息、运行状态、工作情况等内容或者集中于不同传感器,围绕不同对地观测平台的综合语义信息建模研究较少,忽略了异构平台在对地观测过程中的相关性。为掌控空天协同对地观测平台运行数据,提取信息和知识服务于对地观测任务,本文提出构建面向空天协同对地观测的语义信息模型,通过领域本体建模,建立各要素关联关系,抽取空天协同对地观测语义信息,实现运行场景综合语义描述,服务于对地观测活动的信息展示、规划制定和任务运控。
2 研究方法
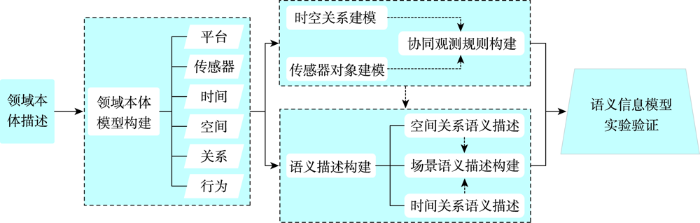
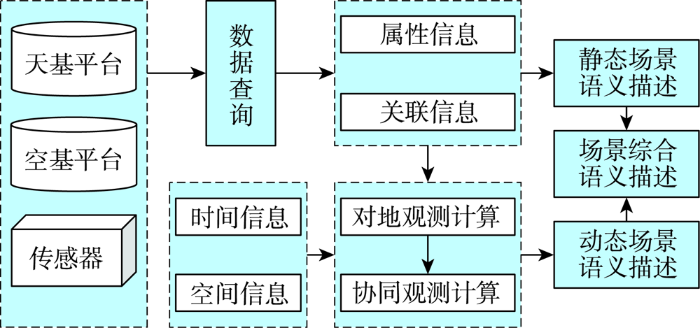
本文的技术路线如图1 所示,主要过程为: ① 建立对空天协同对地观测平台领域本体的基本描述,明确研究内容;② 顾及不同对地观测平台之间的相关性,从平台、传感器、时间、空间等方面出发,基于基本形式本体构建空天协同对地观测平台领域本体模型,并对关键要素进行描述;③ 时空关系和传感器分别是空天协同对地观测任务顺利实现的重要前提和核心组件,在时空关系建模和传感器对象建模基础上,围绕空天协同对地观测构建规则,从而服务于空天协同对地观测任务评估和决策制定;④ 从空间关系和时间关系出发,构建对空天协同对地观测场景的综合语义描述,进而支撑空天协同对地观测的综合语义表达;⑤ 围绕语义信息模型开展实验验证。
图1
图1
服务于空天协同对地观测的语义信息模型构建技术路线
Fig. 1
Technical route of semantic information model construction for aerospace cooperation earth observation
2.1 领域本体描述
本体概念最初诞生于哲学领域,并被引入人工智能、知识工程等领域,其内涵从最初的一种研究存在的科学,已演变为元数据及其相关关系的规范,以及对概念模型明确的规范说明[13 ] 。本体能够利用复杂和丰富的语义关系对领域内各种资源进行描述,并构建易于人和机器理解的语义[14 ] 。
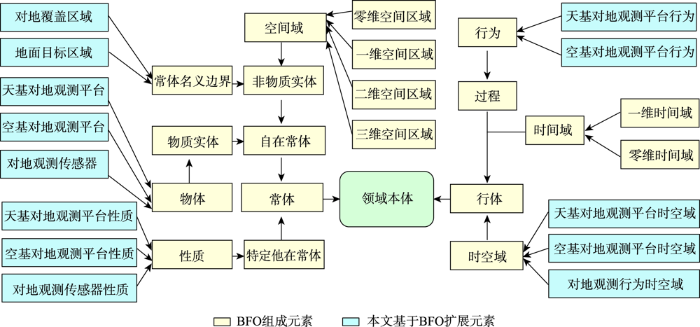
空天协同对地观测涉及天基和空基对地观测平台,不同平台时空特性不同。为了在统一时空基准下实现空天协同对地观测语义信息的综合描述,并反映其动态变化,本文选取基本形式本体(Basic Formal Ontology,BFO)作为上位本体构建空天协同对地观测平台领域本体。BFO[15 -16 ] 是一个服务于科学领域数据检索与分析的顶层本体,可以从多维空间角度对事物进行集成、分类,并表征事物的静态与动态、空间与时间特征。基于BFO,通过分析空天协同对地观测活动中不同平台所包含的属性、状态、行为等要素,本文构建面向空天协同对地观测平台的领域本体(Space-Aero-Cooperative Observation Ontology,SACO2),并将其描述为六元组:
(1) S A C O 2 = { O , S e , R , B , T , S }
式中:SACO 2表示面向空天协同对地观测平台的领域本体对象;O 表示空天协同对地观测平台要素,包括天基对地观测平台及其性质、空基对地观测平台及其性质;Se 表示对地观测平台搭载的传感器要素,包括对地观测传感器及其性质;R 表示对地观测活动中各个要素的相互关系,通过关系计算获取;B 表示对地观测平台对象的行为,包括天基对地观测平台行为和空基对地观测平台行为;T 和S 分别表示对地观测活动中的时间要素和空间要素,时间要素包括时间点和时间段,空间要素包括零维空间、一维空间、二维空间和三维空间。
2.2 领域本体模型构建
为获取空天协同对地观测平台数据和信息并服务于语义信息建模,围绕SACO 2六元组,结合SWE信息模型和功能模型,构建了本体模型(图2 )。
图2
图2
基于BFO的空天协同对地观测平台领域本体模型
Fig. 2
Ontology model of aerospace cooperation earth observation platform based on BFO
平台要素(O )包括物质实体中的天基和空基对地观测平台对象以及特定他在常体中的天基和空基对地观测平台性质。天基对地观测平台属性主要包括卫星名称、北美防空司令部(North American Aerospace Defense Command,NORAD)编号、国际编号、星历时间、平台类型、轨道类型、传感器标识码等要素,其位置信息可利用NORAD发布的两行根数(Two-line Element,TLE)获取;空基对地观测平台属性主要包括平台名称、平台类型、部署位置、续航范围、续航时间、传感器标识码等信息,其位置数据通过航行轨迹获取。其中,传感器标识码用于建立各类对地观测平台与传感器要素的关联关系,每个平台可关联多个传感器。
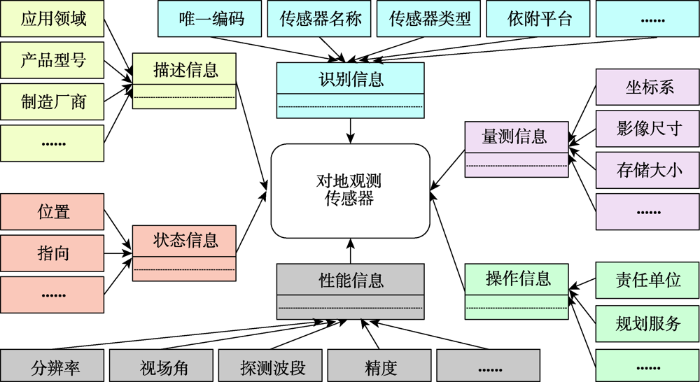
作为空天协同对地观测任务中获取数据的重要工具,传感器要素(Se )需着重考虑,因此本文将传感器要素作为与平台要素同一级别的单独要素进行描述。结合SWE中SensorML、SOS等信息模型和功能模型中对传感器的描述,传感器属性主要包括识别信息(如传感器编码、名称、类型、依附平台)、状态信息(如传感器位置、指向)、量测信息(如坐标系、影像尺寸、存储大小)、性能信息(如分辨率、视场角、探测波段)、描述信息(如应用领域、产品型号、制造厂商)、操作信息(如传感器的责任单位、关联的传感器规划服务SPS)等内容。其中,性能信息是影响协同观测任务获取数据质量的重要因素。
时间要素(T )能够提供统一的时间基准,分为零维时间域的时间点和一维时间域的时间段。时间点是时间的最小组成部分,而时间段是由2个时间点构成的时间区间,可采用绝对时间、相对时间和持续时间描述[17 ] 。其中,绝对时间描述指能够在时间轴上定位的时间,如2021年11月14日;相对时间描述指以绝对时间为基准,通过时间拓扑关系进行定位的描述,如昨天;持续时间描述是指以某个时间点为原点,向前或向后连续的某个时间段,如本周一至今。利用时间要素,结合时间拓扑关系,通过时间语义计算,可以建立时间、时间关系与时间语义之间的映射关系,从而构建时间描述语句。
空间要素(S )能够提供统一的空间基准,分为零维、一维、二维和三维空间。各个要素的空间维度存在差异,如零维空间的天基对地观测平台星下点、一维空间的空基对地观测平台航迹线、二维空间的对地覆盖范围和三维空间的对地观测平台模型;同一要素在不同空间尺度下维度发生变化,如对地观测平台在大尺度范围可综合为点目标,而在小尺度范围则需要利用三维模型进行表示。
关系要素(R )描述本体模型中各个要素之间的关系,主要包括空间关系、时间关系等。其中,空间关系可以分为空间方位关系、空间距离关系和空间拓扑关系;时间关系可以分为时间点关系、时间段关系以及时间点与时间段关系。
行为要素(B )描述对地观测平台执行任务过程中的行为。例如,天基对地观测平台行为要素主要包括平台侧摆、传感器开启等;空基对地观测平台行为要素主要包括平台起飞、改变飞行高度等。
2.3 时空关系建模
时空是各项活动存在的前提和基础,时空关系是空天协同对地观测任务顺利实现的重要因素,对其建模能够为本体模型中各个要素提供时空关系描述,为决策制定和任务规划提供辅助。
2.3.1 时间关系建模
明确时间单位是建立时间关系的前提。空天协同对地观测活动中,时间关系可分为时间点关系、时间段关系以及时间点和时间段关系,而不同时间关系又包括相离、相等、相交、包含、相接5种拓扑关系[17 ] 以及不同事物在时间维度上发生的先后关系[18 ] 。
时间点关系描述不同时间点之间的先后关系。对于时间点t A t B t A t B t A < t B t A t B t A > t B t A t B t A = t B
对于时间段T A t A S t A E t A S < t A E T B t B S t B E t B S < t B E 表1 所示。
时间点与时间段关系本质是零维时间域与一维时间域之间的关系。对于时间点t A T B t B S t B E t B S < t B E 表2 所示。
2.3.2 空间关系建模
空天协同对地观测任务中空间关系包括方位关系、拓扑关系和距离关系[18 -19 ] 。
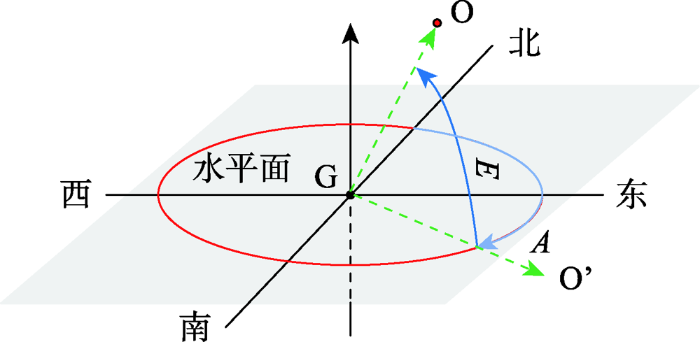
对地观测任务主要关注对地观测平台与地面目标区域之间、对地观测地面覆盖区域与地面目标区域之间、天基对地观测平台星下点与地面目标区域之间、空基对地观测平台部署位置与地面目标区域之间的空间方位关系。上述空间方位关系存在于二维和三维空间中,无法仅仅采用二维空间的方位表示方法。因此,本文采用不同目标之间的相对方位角A 和高度角E 描述空间方位关系,如图3 所示。
图3
图3
相对方位角与高度角示意
Fig. 3
Diagram of relative azimuth and elevation
其中,O 为对地观测平台,G 为地面目标,方位角A 定义为从地面目标G 指北方向线起依顺时针方向至对地观测平台O 和地面目标G 的连线OG 的水平夹角,高度角E 定义为对地观测平台O 和地面目标G 的连线OG 与水平面的夹角。不同目标之间的空间方位关系可以使用角度组合(A , E )量化表示。
空间拓扑关系主要描述满足拓扑几何学原理的各个要素之间的关系,主要表现为点、线、面、体之间的拓扑关系。本文主要关注对地观测平台地面覆盖区域与地面目标区域之间、天基对地观测平台星下点与地面目标区域之间、空基对地观测平台部署位置与地面目标区域之间的空间拓扑关系,并采用应用广泛的9交模型(9 Intersection Model,9IM)进行量化描述[20 ] ,如式(2)所示。
(2) T ( M , N ) = M ∘ ⋂ N ∘ M ∘ ⋂ ∂ N M ∘ ⋂ N - ∂ M ⋂ N ∘ ∂ M ⋂ ∂ N ∂ M ⋂ N - M - ⋂ N ∘ M - ⋂ ∂ N M - ⋂ N -
式中:M N M ∘ N ∘ ∂ M ∂ N M - N -
空间距离关系主要强调各个要素之间空间关系的定量表达。对地观测任务中各个要素在不同空间尺度下几何形态不同,其相互之间空间距离关系存在于点、线和面之间。点与点之间可采用欧式距离确定;点与线之间可采用最近距离量化表示;点与面之间,根据不同需求,可采用点到面的最短距离或者点到面质心的距离量化表示,而点到面的最短距离可以转变为点到组成面的线段的最短距离。因此,空天协同对地观测任务中各个要素的距离关系量化表示可以转化为点到点的欧氏距离和点到直线的最短距离。
2.4 传感器对象建模
传感器是实现空天协同对地观测任务的核心组件。天基和空基对地观测平台所搭载的传感器在观测性能、运行环境、探测波段等方面不尽相同,属于异构传感器。SWE框架能整合异构传感器,通过服务的方式实现传感器资源的有效共享。本文借鉴SWE框架,采用四元组对传感器进行描述(图4 )。
图4
图4
传感器对象建模
Fig. 4
Sensor object modeling
(3) S e = { S e I , S e P , S e M , S e D , S e S , S e O }
式中:S e S e I S e P S e M S e D S e S S e O
2.5 协同观测规则构建
空天协同对地观测任务需要根据实际情况选择平台和传感器,本文以空基对地观测平台(遥感无人机)辅助天基对地观测平台(遥感卫星)为背景,构建协同观测规则。
由于轨道类型、重访周期、传感器性能等因素影响,遥感卫星对地观测会出现部分区域未被观测、观测效果不佳等情况,若亟需特定地面区域遥感数据,可根据已获取数据、被观测区域特点和实际需求等信息,选择遥感无人机进行补充或重点观测。针对该应用场景,依据语义网络规则语言(Semantic Web Rule Language,SWRL)构建协同观测规则。
给定时间范围内遥感卫星完成对地面目标区域的观测后,需要获取已观测区域遥感数据分辨率和未观测区域相关信息。为简化推理与计算,本文围绕已观测区域数据分辨率和未观测区域面积2个方面开展推理构建。针对未观测区域,构建规则计算推理遥感无人机可覆盖范围,并获取理想情况下无法实现观测区域面积:
(4) G r o u n d A r e a ( ? u a ) ∧ h a s A r e a ( ? u a , ? u a _ a r e a ) ∧ U A V ( ? u a v ) ∧ h a s D u r a t i o n ( ? u a v , ? d u r a t i o n ) ∧ h a s C o v e r U n i t ( ? u a v , ? c o v e r _ u n i t ) ∧ s w r l b : m u l t i p l y ( ? c o v e r _ a r e a , ? d u r a t i o n , ? c o v e r _ u n i t ) ∧ s w r l b : s u b t r a c t ( ? r e s i d u a l _ a r e a , ? u a _ a r e a , ? c o v e r _ a r e a ) → h a s R e s i d u a l A r e a ( ? u a v , ? r e s i d u a l _ a r e a )
式中:ua 为地面目标区域未观测部分;ua_area 为地面区域ua 面积;duration 与cover_unit 分别为遥感无人机uav 的续航时间和单位时间覆盖地面范围。通过获取给定续航时间范围内遥感无人机uav 对地覆盖总范围cover_area ,可获取理想情况下遥感无人机对地面目标区域未观测部分进行观测后的剩余面积residual_area ,根据residual_area 大小可获取遥感无人机无法实现观测区域面积。之后,获取对地观测获取观测数据质量,构建规则计算推理遥感无人机搭载传感器性能是否满足需求:
(5) S a t e l l i t e ( ? s a t ) ∧ U A V ( ? u a v ) ∧ h a s S e n s o r ( ? s a t , ? s a t _ s e n s o r ) ∧ h a s S e n s o r ( ? u a v , ? u a v _ s e n s o r ) ∧ h a s S e n s o r T y p e ( ? s a t _ s e n s o r , ? s a t _ s e n s o r _ t y p e ) ∧ h a s R e s o l u t i o n ( ? s a t _ s e n s o r , ? s a t _ s e n s o r _ r e s o l u t i o n ) ∧ h a s S e n s o r T y p e ( ? u a v _ s e n s o r , ? u a v _ s e n s o r _ t y p e ) ∧ h a s R e s o l u t i o n ( ? u a v _ s e n s o r , ? u a v _ s e n s o r _ r e s o l u t i o n ) ∧ s w r l b : e q u a l ( ? s a t _ s e n s o r _ t y p e , ? u a v _ s e n s o r _ t y p e ) ∧ s w r l b : g r e a t e r T h a n O r E q u a l ( ? s a t _ s e n s o r _ r e s o l u t i o n , ? u a v _ s e n s o r _ r e s o l u t i o n ) → i s M e e t M i n R e q u i r e ( ? u a v , ' Y E S ' )
式中:sat_sensor 、sat_sensor_type 、sat_sensor_resolution 分别表示遥感卫星sat 传感器、传感器类型和传感器分辨率;uav_sensor 、uav_sensor_type 、uav_sensor_resolution 分别表示遥感无人机uav 传感器、传感器类型和传感器分辨率;当遥感无人机uav 与遥感卫星sat 的传感器相同,同时遥感无人机传感器分辨率uav_sensor_resolution 不低于遥感卫星传感器分辨率sat_sensor_resolution 时,遥感无人机传感器性能满足观测最低需求。
综合考虑遥感无人机对地面目标区域未观测部分的观测能力以及所搭载传感器的性能,从而为无人机平台选择以及后续任务规划和决策制定提供信息支持。
2.6 语义描述构建
空天协同对地观测具有显著时空特性,对其进行综合语义表达的前提是建立有效的时空关系语义描述。因此,本文重点围绕时间和空间开展语义计算,进而从静态和动态两方面出发构建空天协同对地观测场景综合语义描述。
2.6.1 时间关系语义描述
时间语义计算主要涉及时间单位和时间关系要素。基于时间关系建模,时间关系语义描述中时间关系量化表示和语义表示之间映射如表3 所示。
2.6.2 空间关系语义描述
空间关系语义描述基于空间关系建模,通过建立空间关系定量表示与定性描述之间的映射实现。
(1)空间方位关系语义。空间方位关系可采用角度组合(A , E )定量表示,但在实际应用中,采用高度角E 描述对地观测平台的高度信息并不具有较大意义,因此采用东南西北4个方位元素结合方位角A 实现空间方位关系语义描述,如表4 所示;同时,将高度角E 大于0°的情况采用“上空”、“空中”等方式描述,例如“位于东北方向上空”。
(2)空间拓扑关系语义。空间拓扑关系采用9IM量化表示,其与语义描述之间映射关系如表5 所示。
(3)空间距离关系语义。距离关系语义表示可以通过定量表示与定性描述之间的映射实现。距离的定性描述通常使用“远”、“近”等模糊词语对应不同的距离范围。本文建立的定量距离D 与定性描述D semantic 之间的映射关系为:
(6) D S e m a n t i c = 遥 远 ( D ≥ D 1 ) 远 ( D 1 > D ≥ D 2 ) 适 中 ( D 2 > D ≥ D 3 ) 近 ( D 3 > D ≥ D 4 ) 极 近 ( D 4 > D )
式中:D i ( i = 1,2 , 3,4 ) D 1 > D 2 > D 3 > D 4
2.6.3 场景语义描述构建
统一时空基准下,空天协同对地观测活动具有长期保持不变的要素和随时空不断变化的内容,因此本文将场景语义描述分为静态描述和动态描述,通过静态与动态结合实现场景语义的综合描述。
静态场景语义描述主要针对一段时期保持不变的静态信息,通常可以通过数据库获取。静态场景语义要素主要关注的对象包括:
(1)对地观测场景基本信息和关联关系,主要包括时间范围、空间范围、组成要素(各类对地观测平台、对地观测传感器、地面目标区域)标识信息以及相互之间的静态关系。
(2)对地观测平台基本信息和关系,主要包括各类对地观测平台的基础信息、运行状态、传感器标识信息以及相互之间的静态关系。
(3)对地观测传感器基本信息和关系,主要包括传感器基础信息以及与其他要素之间的静态关系。
(4)地面目标区域信息和关系,主要包括地面目标区域基础信息以及与其他要素之间的静态关系。
而动态场景语义描述则根据对地观测平台的不同,分为天基对地观测场景描述和空基对地观测场景描述:
(1)天基对地观测场景描述。与天基对地观测活动密切相关的动态信息主要包括天基对地观测平台位置信息、对地覆盖区域与地面目标区域时空关系、地面已观测区域时空变化等内容。天基对地观测平台位置信息通常使用NORAD公布的轨道根数结合时间要素获取,加之地面目标区域位置数据,即可获取二者之间的空间关系,进而实现天基对地观测平台相对位置的语义描述;综合利用天基对地观测平台的位置、传感器信息、对地覆盖范围等信息,结合空间拓扑关系,获取天基对地观测平台对地覆盖范围和覆盖率,从而获取天基对地观测平台对地面区域覆盖情况随时空变化的关系。利用上述信息,能及时获取地面目标区域中被观测区域面积、被观测区域比例、被观测区域数据分辨率等信息,结合领域本体模型和语义表达信息,从而构建天基对地观测场景语义描述。
(2)空基对地观测场景描述。与空基对地观测活动密切相关的动态信息主要包括空基对地观测平台位置信息、对地覆盖区域与地面目标区域时空关系、地面已观测区域时空变化等内容。其中,除位置信息获取方式不同之外,其对地观测场景语义描述与天基对地观测平台基本相同。空基对地观测平台位置信息通常需要实时获取,可采用三维坐标(x , y , z )量化表示,结合地面目标区域位置数据和空间关系语义描述方法,即可实现空基对地观测场景描述。
基于静态和动态场景语义描述,根据给定的时间信息,特定时空背景下对地观测场景综合语义描述构建步骤如图5 所示,具体步骤为:
(1)通过数据查询获取各个组成要素的属性信息和关联信息,并构建空天协同对地观测场景静态语义描述内容。
(2)基于给定时间和空间信息,按需计算对地观测信息和时空关系,并利用协同观测规则,推理获取协同对地观测方案。
(3)基于动态场景语义描述,构建空天协同对地观测场景动态语义描述内容,结合静态场景语义描述,构建场景综合语义描述,从而为决策人员提供辅助信息。
图5
图5
对地观测场景综合语义描述构建流程
Fig. 5
Construction of comprehensive description of scenario semantics
3 实验与应用
3.1 实验数据设定
为验证空天协同对地观测平台领域本体以及语义描述构建效果,设定实验数据为:时间范围自2021年10月11日至2021年10月14日;天基对地观测平台分别为资源三号卫星02星(NORAD编号:41556)和高分八号(NORAD编号:40701),两行根数获取自公开网站CelesTrak,卫星搭载光学传感器视场角均设置为18°,获取地面观测数据分辨率设为1 m;空基对地观测平台为3架遥感无人机,平台性能和搭载传感器性能如表6 所示;地面观测区域主要为河南省郑州市,通过矢量数据计算获取面积为7436.22 km2 。
3.2 实验结果及分析
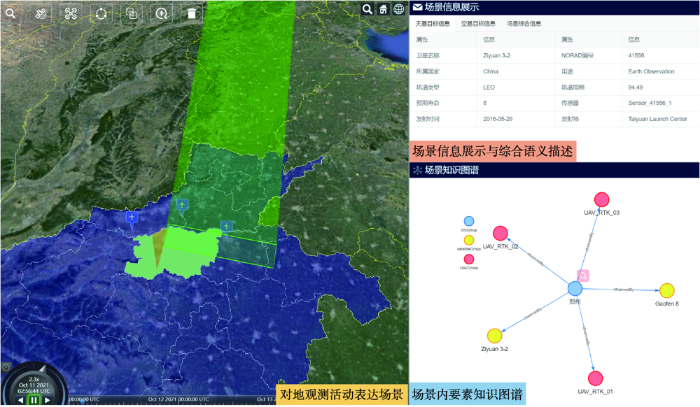
本文基于微服务框架Spring Cloud和三维地理空间可视化框架Cesium构建的服务于空天协同对地观测平台语义描述信息表达的实验系统如图6 所示,主要包括对地观测活动表达场景、场景内要素知识图谱以及对地观测场景综合语义描述。
图6
图6
语义描述信息表达实验系统
Fig. 6
Experimental system for semantic model representation
(1)基于空天协同对地观测平台领域本体模型,对地观测活动表达场景能获取对地观测平台与传感器的信息,通过计算分析实时展示天基和空基对地观测平台的位置信息、运行状态、观测效果等内容。
(2)通过时空关系建模和传感器对象建模,场景内要素知识图谱能够按需表达对地观测场景中不同要素与其他要素之间的相互关系。
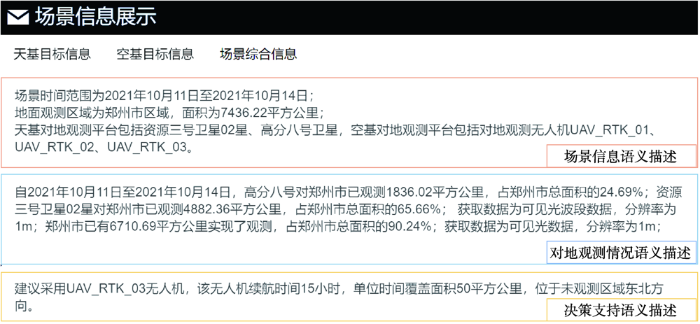
(3)对地观测场景综合语义描述包括天基目标信息、空基目标信息和场景综合信息。其中,天基目标信息和空基目标信息属于静态场景语义描述,而场景综合信息则属于动态场景语义描述,同时通过协同观测规则推理实现一定程度的决策支持(图7 )。
图7
图7
对地观测场景综合语义描述
Fig. 7
Scenario semantic description of earth observation
图7 中,场景信息语义描述能够体现当前时间范围、天基对地观测平台、空基对地观测平台和观测对象;对地观测情况语义描述表明,天基对地观测平台完成对地面区域覆盖范围合计6710.69 km2 ,未观测区域面积为725.53 km2 ;决策支持语义描述中,利用协同观测规则,结合语义描述,推理获取建议采用的空基对地观测平台。决策人员可以根据综合语义描述,考虑空基对地观测平台观测能力以及所搭载传感器的性能,进行任务规划,实现决策制定。
4 结论与讨论
4.1 结论
空天协同对地观测能够充分利用不同平台优势,实现对地观测活动的广域部署、全域探测、快速响应。围绕不同对地观测平台综合语义信息描述缺乏的问题,本文提出并构建服务于空天协同对地观测的语义信息模型。
(1)顾及不同对地观测平台之间的相关性,从平台、传感器、时间、空间等方面出发,实现对天基和空基对地观测平台的综合描述,并基于BFO上位本体构建空天协同对地观测平台领域本体模型。
(2)通过时空关系建模和传感器对象建模,结合空天协同对地观测活动,构建空天协同对地观 测规则,支撑空天协同对地观测的任务评估和决策制定。
(3)从空间关系和时间关系语义描述出发,通过静态和动态场景语义描述,构建对空天协同对地观测场景的综合语义描述,服务于空天协同对地观测的综合语义表达。
(4)构建实验系统,以河南省郑州市为对象,利用天基对地观测平台和空基对地观测平台开展观测任务,实时展示天基和空基对地观测平台协同对地观测活动场景,并以知识图谱形式动态表达对地观测平台与地面待观测区域之间的关联关系,同时利用协同观测规则,获取任务完成情况,给出对地观测平台选择相关建议。
实验系统结果表明,本文工作能够有效表达空天协同对地观测活动,并为协同对地观测任务提供一定程度的决策支持,能够有效支撑空天协同对地观测相关任务的规划和执行。
4.2 讨论
本文虽然围绕空天协同对地观测语义信息建模开展了一定的研究,但是构建的对地观测场景较为简单,没有考虑复杂背景下的空天协同对地观测语义信息构建,需要在下一步工作中进行深入考虑;协同观测规则考虑方面较少,需要增加更多相关因素进行推理,从而为对地观测活动提供更加精确和详实的信息支持;另外,本文计划为后续的无人机蜂群对地观测、遥感知识图谱驱动的多模态数据解译等相关研究提供一定的支持,并奠定一定的前期基础。
参考文献
View Option
[2]
Gu X F Tong X D . Overview of China earth observation satellite programs[space agencies
[J]. IEEE Geoscience and Remote Sensing Magazine , 2015 , 3 (3 ):113 -129 . DOI: 10.1109/MGRS.2015.2467172
URL
[本文引用: 1]
[4]
晏磊 , 廖小罕 , 周成虎 , 等 . 中国无人机遥感技术突破与产业发展综述
[J]. 地球信息科学学报 , 2019 , 21 (4 ):476 -495 .
DOI:10.12082/dqxxkx.2019.180589
[本文引用: 1]
无人机是未来网络环境下一种数据驱动的空中移动智能体,而无人机遥感则是无人机应用最重要的引领性产业。本文首先以国内外无人机遥感发展现状为背景,重点概述了中国无人机遥感21世纪以来“十五”到“十三五”所获得的具有代表性的国家支持与推动的发展历程,阐述了无人机遥感定标场,航空航天定标场的建立以及应用验证,包括无人机遥感系统的载荷与系统技术发展;然后,进一步阐述了以遥感定标场、地物参量引导载荷性能、系统模型为代表的中国无人机遥感的相关技术跨越;接着,概略介绍了无人机遥感在国防反恐安全以及跨国应急救援,国土测绘与海洋岛礁测绘应用,地质灾害应用以及国家应急救援等领域的产业应用;最后,介绍了中国在无人航空遥感领域展开的跨越性的工作,包括组网智能控制、精度和实时性度量基础、载荷平台自组织冗余容错、遥感大数据云处理技术和无人机遥感组网实用化等内容。未来无人机遥感发展的总体目标是建立起具备迅捷信息获取能力的无人航空器组网观测系统,实现无人航空器组网技术由项目层面跨越到遥感领域,同时也为中国成为世界遥感强国的国家战略跨越奠定基础。
[ Yan L Liao X H Zhou C H , et al . The impact of UAV remote sensing technology on the industrial development of China: a review
[J]. Journal of Geo-information Science , 2019 , 21 (4 ):476 -495 . ] DOI: 10.12082/dqxxkx.2019.180589
URL
[本文引用: 1]
[5]
Liao X Yue H Liu R , et al . Launching an unmanned aerial vehicle remote sensing data carrier: Concept, key components and prospects
[J]. International Journal of Digital Earth , 2020 , 13 (10 ):1 -14 . DOI: 10.1080/17538947.2019.1698664
URL
[本文引用: 1]
[6]
李德仁 . 论空天地一体化对地观测网络
[J]. 地球信息科学学报 , 2012 , 14 (4 ):419 -425 .
DOI:10.3724/SP.J.1047.2012.00419
[本文引用: 1]
空天地一体化对地观测网不仅是最具发展前途的高新技术领域之一,也是保障国家安全、经济社会发展的重要基础设施。本文首先全面论述了对地观测网研究的主要理论问题、关键技术、发展现状和趋势;然后,介绍了国产卫星遥感数据的一体化综合快速处理技术,在此基础上论述了广义空间信息网格的概念和内涵;最后指出,需以提供快速、精确和实时的空间信息服务为目标,加快开展对地观测网的理论与技术研究,推进数字地球走向智慧地球的转变。
[ Li D R . On space-air-ground integrated earth observation network
[J]. Journal of Geo-information Science , 2012 , 14 (4 ):419 -425 . ] DOI: 10.3724/SP.J.1047.2012.00419
URL
[本文引用: 1]
[7]
李军 , 李军 , 钟志农 , 等 . 基于SWE的空天资源对地观测协同任务规划服务模型
[J]. 国防科技大学学报 , 2013 , 35 (3 ):108 -113 .
[本文引用: 2]
[ Li J Li J Zhong Z N , et al . A service model based on SWE for space-aeronautics cooperation earth observing operations
[J]. Journal of National University of Defense Technology , 2013 , 35 (3 ):108 -113 . ] DOI: 10.3969/j.issn.1001-2486.2013.03.019
URL
[本文引用: 2]
[8]
Zhang X Chen N C Chen Z Q , et al . Geospatial sensor web: a cyber-physical infrastructure for geoscience research and application
[J]. Earth-Science Reviews , 2018 , 185 :684 -703 . DOI: 10.1016/j.earscirev.2018.07.006
URL
[本文引用: 1]
[9]
Chen N C Xing C J Zhang X , et al . Spaceborne earth-observing optical sensor static capability index for clustering
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2015 , 53 (10 ):5504 -5518 . DOI: 10.1109/TGRS.2015.2424298
URL
[本文引用: 1]
[10]
Chen N C Zhang X . A dynamic observation capability index for quantitatively pre-evaluating diverse optical imaging satellite sensors
[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing , 2013 , 7 (2 ):515 -530 . DOI: 10.1109/JSTARS.2013.2293174
URL
[本文引用: 1]
[11]
陈能成 , 杨训亮 , 王晓蕾 . 地理空间传感网信息公共服务平台的设计与实现
[J]. 地球信息科学学报 , 2013 , 15 (6 ):887 -894 ,917.
DOI:10.3724/SP.J.1047.2013.00887
[本文引用: 1]
随着对地观测技术的发展,传感器类型与数量不断增加,为了高效管理传感网中相关的信息与服务资源,便于用户按需、全面和准确地获取并应用这些资源,基于传感网信息模型和服务接口规范,设计并实现了地理空间传感网信息公共服务平台GeoSensor。该平台通过调用和组合传感器注册服务、传感器观测服务、实时制图服务和卫星位置服务等多种服务,实时获取传感器、观测数据和数据产品等信息资源,并在天地图上以图形、文字、表格和视频等方式形象生动地展示这些信息资源。GeoSensor系统实现了对遥感、移动和原位等类型的对地观测传感器及其观测数据等资源的在线搜索、即时获取、网络控制和实时制图,可满足应急处理时对传感器检索、观测数据获取、传感器控制和数据产品生成等功能的需求。
[ Chen N C Yang X L Wang X L . Design and implementation of geospatial sensor web information public service platform
[J]. Journal of Geo-information Science , 2013 , 15 (6 ):887 -894 ,917. ] DOI: 10.3724/SP.J.1047.2013.00887
URL
[本文引用: 1]
[12]
Liang S H Huang C Y . GeoCENS: a geospatial cyberinfrastructure for the world-wide sensor web
[J]. Sensors , 2013 , 13 (10 ):13402 -13424 . DOI: 10.3390/s131013402
URL
[本文引用: 1]
[13]
朱玲 , 董燕 , 杨峰 . 基本形式化本体的研究进展
[J]. 中国实验方剂学杂志 , 2018 , 24 (2 ):208 -212 .
[本文引用: 1]
[ Zhu L Dong Y Yang F . Research progress of basic formal ontology
[J]. Chinese Journal of Experimental Traditional Medical Formulae , 2018 , 24 (2 ):208 -212 . ] DOI: 10.13422/j.cnki.syfjx.2018020208
URL
[本文引用: 1]
[14]
段宇锋 , 黄思思 . 基于BFO构建中文植物物种多样性领域本体的研究
[J]. 现代图书情报技术 , 2015 , 31 (12 ):72 -79 .
[本文引用: 1]
[ Duan Y F Huang S S . Research on construction of Chinese plant species diversity domain ontology based on BFO
[J]. New Technology of Library and Information Service , 2015 , 31 (12 ):72 -79 . ]
[本文引用: 1]
[15]
Spear A D Ceusters W Smith B . Functions in basic formal ontology
[J]. Applied Ontology , 2016 , 11 (2 ):103 -128 . DOI: 10.3233/ao-160164
URL
[本文引用: 1]
[16]
朱彦 , 郑捷 , 李晓瑛 , 等 . 基本形式化本体及其中文版介绍
[J]. 医学信息学杂志 , 2021 , 42 (1 ):24 -28 ,60.
[本文引用: 1]
[ Zhu Y Zheng J Li X Y , et al . Introduction to basic formal ontology and its Chinese version
[J]. Journal of Medical Informatics , 2021 , 42 (1 ):24 -28 ,60. ] DOI: 10.3969/j.issn.1673-6036.2021.01.006
URL
[本文引用: 1]
[17]
曹启程 , 朱欣焰 , 吴瑞龙 , 等 . 基于本体的遥感数据需求文本时间获取及其语义计算
[J]. 武汉大学学报·信息科学版 , 2021 , 46 (7 ):1114 -1122 .
[本文引用: 2]
[ Cao Q C Zhu X Y Wu R L , et al . Time extracting and semantic computing of remote sensing data demand text based on ontology
[J]. Geomatics and Information Science of Wuhan University , 2021 , 46 (7 ):1114 -1122 . ] DOI: 10.13203/j.whugis20190240
URL
[本文引用: 2]
[18]
李小龙 . 支持动态数据管理与时空过程模拟的实时GIS数据模型研究 [D]. 武汉 : 武汉大学 , 2014 .
[本文引用: 2]
[ Li X L . Real-time GIS data model supporting dynamic data management and spatiotemporal porcess simulation [D]. Wuhan : Wuhan University , 2014 . ]
[本文引用: 2]
[19]
禄小敏 , 闫浩文 , 王中辉 . 群组目标空间方向关系建模
[J]. 地球信息科学学报 , 2018 , 20 (6 ):721 -729 .
DOI:10.12082/dqxxkx.2018.170589
[本文引用: 1]
已有的空间方向关系描述模型大都针对空间单个目标,对于群组目标空间方向关系计算模型却鲜有研究和论著。为此,提出适用于群组目标空间方向关系的定性描述与定量计算模型。首先,群组目标空间方向关系定性描述模型利用带约束的Delaunay三角剖分与动态阈值“剥皮”法求得了源目标群分布边界多边形;然后,以方向关系矩阵模型为依据对其方向关系进行了定性描述与建模;其次,运用数学形态变换理论对参考目标群进行“膨胀”,求解“膨胀”后的参考目标群与源目标群的交集;最后,在此基础上结合地学信息图谱相关理论实现了群组目标空间方向关系的定量计算与建模。实验表明,群组目标空间方向关系定性描述模型较好地顾及了群组目标的空间形态对空间方向关系的影响,能够对空间方向关系做出较为准确的定性判断;群组目标空间方向关系定量计算模型实现了群组目标空间方向关系的精确定量描述,且能够以形象直观的方式对群组目标空间方向关系进行可视化表达。2种模型较好地解决了群组目标空间方向关系的描述与计算问题。
[ Lu X M Yan H W Wang Z H . The modeling of spatial direction relationship between object groups
[J]. Journal of Geo-information Science , 2018 , 20 (6 ):721 -729 . ] DOI: 10.12082/dqxxkx.2018.170589
URL
[本文引用: 1]
[20]
王占刚 , 吴自兴 , 王想红 . 语义尺度影响的相离区域合并与拓扑关系计算
[J]. 武汉大学学报·信息科学版 , 2018 , 43 (11 ):1712 -1718 .
[本文引用: 1]
[ Wang Z G Wu Z X Wang X H . Disjoint region merging and topological relation computing induced by semantic scale
[J]. Geomatics and Information Science of Wuhan University , 2018 , 43 (11 ):1712 -1718 . ] DOI: 10.13203/j.whugis20170009
URL
[本文引用: 1]
Big earth data from space: A new engine for earth science
1
2016
... 对地观测技术是获取地理空间信息的重要手段[1 ] ,现已进入多平台和多传感器发展阶段,并主要依托天基和空基对地观测平台实现.天基对地观测平台(如遥感卫星等)具有宏观视野,可实现全球覆盖,但受环境因素影响较大,且难以对特定区域及时连续观测[2 -3 ] ;空基观测平台(如遥感无人机)具有高频次、高性价比等特点,能够较容易地获取厘米级甚至是毫米级数据[4 ] ,且可同时保证较高的空间和时间分辨率[5 ] .天基和空基对地观测平台的不同特点催生了空天协同对地观测技术的发展,通过对地观测平台的广域部署、全域探测、快速响应和多元互补[6 ] ,提升获取数据的空间分辨率、时间分辨率以及覆盖范围[7 ] . ...
Overview of China earth observation satellite programs[space agencies
1
2015
... 对地观测技术是获取地理空间信息的重要手段[1 ] ,现已进入多平台和多传感器发展阶段,并主要依托天基和空基对地观测平台实现.天基对地观测平台(如遥感卫星等)具有宏观视野,可实现全球覆盖,但受环境因素影响较大,且难以对特定区域及时连续观测[2 -3 ] ;空基观测平台(如遥感无人机)具有高频次、高性价比等特点,能够较容易地获取厘米级甚至是毫米级数据[4 ] ,且可同时保证较高的空间和时间分辨率[5 ] .天基和空基对地观测平台的不同特点催生了空天协同对地观测技术的发展,通过对地观测平台的广域部署、全域探测、快速响应和多元互补[6 ] ,提升获取数据的空间分辨率、时间分辨率以及覆盖范围[7 ] . ...
Progress of earth observation in China
1
2018
... 对地观测技术是获取地理空间信息的重要手段[1 ] ,现已进入多平台和多传感器发展阶段,并主要依托天基和空基对地观测平台实现.天基对地观测平台(如遥感卫星等)具有宏观视野,可实现全球覆盖,但受环境因素影响较大,且难以对特定区域及时连续观测[2 -3 ] ;空基观测平台(如遥感无人机)具有高频次、高性价比等特点,能够较容易地获取厘米级甚至是毫米级数据[4 ] ,且可同时保证较高的空间和时间分辨率[5 ] .天基和空基对地观测平台的不同特点催生了空天协同对地观测技术的发展,通过对地观测平台的广域部署、全域探测、快速响应和多元互补[6 ] ,提升获取数据的空间分辨率、时间分辨率以及覆盖范围[7 ] . ...
中国无人机遥感技术突破与产业发展综述
1
2019
... 对地观测技术是获取地理空间信息的重要手段[1 ] ,现已进入多平台和多传感器发展阶段,并主要依托天基和空基对地观测平台实现.天基对地观测平台(如遥感卫星等)具有宏观视野,可实现全球覆盖,但受环境因素影响较大,且难以对特定区域及时连续观测[2 -3 ] ;空基观测平台(如遥感无人机)具有高频次、高性价比等特点,能够较容易地获取厘米级甚至是毫米级数据[4 ] ,且可同时保证较高的空间和时间分辨率[5 ] .天基和空基对地观测平台的不同特点催生了空天协同对地观测技术的发展,通过对地观测平台的广域部署、全域探测、快速响应和多元互补[6 ] ,提升获取数据的空间分辨率、时间分辨率以及覆盖范围[7 ] . ...
中国无人机遥感技术突破与产业发展综述
1
2019
... 对地观测技术是获取地理空间信息的重要手段[1 ] ,现已进入多平台和多传感器发展阶段,并主要依托天基和空基对地观测平台实现.天基对地观测平台(如遥感卫星等)具有宏观视野,可实现全球覆盖,但受环境因素影响较大,且难以对特定区域及时连续观测[2 -3 ] ;空基观测平台(如遥感无人机)具有高频次、高性价比等特点,能够较容易地获取厘米级甚至是毫米级数据[4 ] ,且可同时保证较高的空间和时间分辨率[5 ] .天基和空基对地观测平台的不同特点催生了空天协同对地观测技术的发展,通过对地观测平台的广域部署、全域探测、快速响应和多元互补[6 ] ,提升获取数据的空间分辨率、时间分辨率以及覆盖范围[7 ] . ...
Launching an unmanned aerial vehicle remote sensing data carrier: Concept, key components and prospects
1
2020
... 对地观测技术是获取地理空间信息的重要手段[1 ] ,现已进入多平台和多传感器发展阶段,并主要依托天基和空基对地观测平台实现.天基对地观测平台(如遥感卫星等)具有宏观视野,可实现全球覆盖,但受环境因素影响较大,且难以对特定区域及时连续观测[2 -3 ] ;空基观测平台(如遥感无人机)具有高频次、高性价比等特点,能够较容易地获取厘米级甚至是毫米级数据[4 ] ,且可同时保证较高的空间和时间分辨率[5 ] .天基和空基对地观测平台的不同特点催生了空天协同对地观测技术的发展,通过对地观测平台的广域部署、全域探测、快速响应和多元互补[6 ] ,提升获取数据的空间分辨率、时间分辨率以及覆盖范围[7 ] . ...
论空天地一体化对地观测网络
1
2012
... 对地观测技术是获取地理空间信息的重要手段[1 ] ,现已进入多平台和多传感器发展阶段,并主要依托天基和空基对地观测平台实现.天基对地观测平台(如遥感卫星等)具有宏观视野,可实现全球覆盖,但受环境因素影响较大,且难以对特定区域及时连续观测[2 -3 ] ;空基观测平台(如遥感无人机)具有高频次、高性价比等特点,能够较容易地获取厘米级甚至是毫米级数据[4 ] ,且可同时保证较高的空间和时间分辨率[5 ] .天基和空基对地观测平台的不同特点催生了空天协同对地观测技术的发展,通过对地观测平台的广域部署、全域探测、快速响应和多元互补[6 ] ,提升获取数据的空间分辨率、时间分辨率以及覆盖范围[7 ] . ...
论空天地一体化对地观测网络
1
2012
... 对地观测技术是获取地理空间信息的重要手段[1 ] ,现已进入多平台和多传感器发展阶段,并主要依托天基和空基对地观测平台实现.天基对地观测平台(如遥感卫星等)具有宏观视野,可实现全球覆盖,但受环境因素影响较大,且难以对特定区域及时连续观测[2 -3 ] ;空基观测平台(如遥感无人机)具有高频次、高性价比等特点,能够较容易地获取厘米级甚至是毫米级数据[4 ] ,且可同时保证较高的空间和时间分辨率[5 ] .天基和空基对地观测平台的不同特点催生了空天协同对地观测技术的发展,通过对地观测平台的广域部署、全域探测、快速响应和多元互补[6 ] ,提升获取数据的空间分辨率、时间分辨率以及覆盖范围[7 ] . ...
基于SWE的空天资源对地观测协同任务规划服务模型
2
2013
... 对地观测技术是获取地理空间信息的重要手段[1 ] ,现已进入多平台和多传感器发展阶段,并主要依托天基和空基对地观测平台实现.天基对地观测平台(如遥感卫星等)具有宏观视野,可实现全球覆盖,但受环境因素影响较大,且难以对特定区域及时连续观测[2 -3 ] ;空基观测平台(如遥感无人机)具有高频次、高性价比等特点,能够较容易地获取厘米级甚至是毫米级数据[4 ] ,且可同时保证较高的空间和时间分辨率[5 ] .天基和空基对地观测平台的不同特点催生了空天协同对地观测技术的发展,通过对地观测平台的广域部署、全域探测、快速响应和多元互补[6 ] ,提升获取数据的空间分辨率、时间分辨率以及覆盖范围[7 ] . ...
... 对空天协同对地观测进行建模,并获取对地观测平台的运行状态、观测效能、关联关系等方面的语义信息对决策制定、任务规划等活动至关重要.地理空间传感网(Geospatial Sensor Web,GSW)作为一种新的时空信息基础设施,能够管理、集成和共享各种传感器资源,并为多平台协同观测提供支持[8 ] ,由此也产生了一系列研究成果,包括用于卫星传感器评估的传感器静态能力检索(Sensor Static Capability Index,SSCI)[9 ] 和动态观测能力检索 (Dynamic Observation Capability Index,DOCI)[10 ] 以及能够描述各类异构传感器的地理空间传感网原型系统,如GeoSensor[11 ] 、GeoCENS[12 ] 等.为了实现对地观测异构传感器网络连接和资源共享,开放地理空间信息联盟(Open Geospatial Consortium,OGC)建立了专门面向各类传感器的网络整合框架(Sensor Web Enablement,SWE),实现传感器资源的注册、查找、应用及观测数据的订阅和发布[7 ] .SWE包括一系列信息和功能模型,如为描述传感器和传感器观测处理方法提供通用模型和编码结构的传感器建模语言(Sensor Model Language,SensorML)、为传感器调度提供各类信息的传感器调度服务(Sensor Planning Service,SPS)、辅助获取传感测量数据以及传感系统信息的传感器观测服务(Sensor Observation Service,SOS)等. ...
基于SWE的空天资源对地观测协同任务规划服务模型
2
2013
... 对地观测技术是获取地理空间信息的重要手段[1 ] ,现已进入多平台和多传感器发展阶段,并主要依托天基和空基对地观测平台实现.天基对地观测平台(如遥感卫星等)具有宏观视野,可实现全球覆盖,但受环境因素影响较大,且难以对特定区域及时连续观测[2 -3 ] ;空基观测平台(如遥感无人机)具有高频次、高性价比等特点,能够较容易地获取厘米级甚至是毫米级数据[4 ] ,且可同时保证较高的空间和时间分辨率[5 ] .天基和空基对地观测平台的不同特点催生了空天协同对地观测技术的发展,通过对地观测平台的广域部署、全域探测、快速响应和多元互补[6 ] ,提升获取数据的空间分辨率、时间分辨率以及覆盖范围[7 ] . ...
... 对空天协同对地观测进行建模,并获取对地观测平台的运行状态、观测效能、关联关系等方面的语义信息对决策制定、任务规划等活动至关重要.地理空间传感网(Geospatial Sensor Web,GSW)作为一种新的时空信息基础设施,能够管理、集成和共享各种传感器资源,并为多平台协同观测提供支持[8 ] ,由此也产生了一系列研究成果,包括用于卫星传感器评估的传感器静态能力检索(Sensor Static Capability Index,SSCI)[9 ] 和动态观测能力检索 (Dynamic Observation Capability Index,DOCI)[10 ] 以及能够描述各类异构传感器的地理空间传感网原型系统,如GeoSensor[11 ] 、GeoCENS[12 ] 等.为了实现对地观测异构传感器网络连接和资源共享,开放地理空间信息联盟(Open Geospatial Consortium,OGC)建立了专门面向各类传感器的网络整合框架(Sensor Web Enablement,SWE),实现传感器资源的注册、查找、应用及观测数据的订阅和发布[7 ] .SWE包括一系列信息和功能模型,如为描述传感器和传感器观测处理方法提供通用模型和编码结构的传感器建模语言(Sensor Model Language,SensorML)、为传感器调度提供各类信息的传感器调度服务(Sensor Planning Service,SPS)、辅助获取传感测量数据以及传感系统信息的传感器观测服务(Sensor Observation Service,SOS)等. ...
Geospatial sensor web: a cyber-physical infrastructure for geoscience research and application
1
2018
... 对空天协同对地观测进行建模,并获取对地观测平台的运行状态、观测效能、关联关系等方面的语义信息对决策制定、任务规划等活动至关重要.地理空间传感网(Geospatial Sensor Web,GSW)作为一种新的时空信息基础设施,能够管理、集成和共享各种传感器资源,并为多平台协同观测提供支持[8 ] ,由此也产生了一系列研究成果,包括用于卫星传感器评估的传感器静态能力检索(Sensor Static Capability Index,SSCI)[9 ] 和动态观测能力检索 (Dynamic Observation Capability Index,DOCI)[10 ] 以及能够描述各类异构传感器的地理空间传感网原型系统,如GeoSensor[11 ] 、GeoCENS[12 ] 等.为了实现对地观测异构传感器网络连接和资源共享,开放地理空间信息联盟(Open Geospatial Consortium,OGC)建立了专门面向各类传感器的网络整合框架(Sensor Web Enablement,SWE),实现传感器资源的注册、查找、应用及观测数据的订阅和发布[7 ] .SWE包括一系列信息和功能模型,如为描述传感器和传感器观测处理方法提供通用模型和编码结构的传感器建模语言(Sensor Model Language,SensorML)、为传感器调度提供各类信息的传感器调度服务(Sensor Planning Service,SPS)、辅助获取传感测量数据以及传感系统信息的传感器观测服务(Sensor Observation Service,SOS)等. ...
Spaceborne earth-observing optical sensor static capability index for clustering
1
2015
... 对空天协同对地观测进行建模,并获取对地观测平台的运行状态、观测效能、关联关系等方面的语义信息对决策制定、任务规划等活动至关重要.地理空间传感网(Geospatial Sensor Web,GSW)作为一种新的时空信息基础设施,能够管理、集成和共享各种传感器资源,并为多平台协同观测提供支持[8 ] ,由此也产生了一系列研究成果,包括用于卫星传感器评估的传感器静态能力检索(Sensor Static Capability Index,SSCI)[9 ] 和动态观测能力检索 (Dynamic Observation Capability Index,DOCI)[10 ] 以及能够描述各类异构传感器的地理空间传感网原型系统,如GeoSensor[11 ] 、GeoCENS[12 ] 等.为了实现对地观测异构传感器网络连接和资源共享,开放地理空间信息联盟(Open Geospatial Consortium,OGC)建立了专门面向各类传感器的网络整合框架(Sensor Web Enablement,SWE),实现传感器资源的注册、查找、应用及观测数据的订阅和发布[7 ] .SWE包括一系列信息和功能模型,如为描述传感器和传感器观测处理方法提供通用模型和编码结构的传感器建模语言(Sensor Model Language,SensorML)、为传感器调度提供各类信息的传感器调度服务(Sensor Planning Service,SPS)、辅助获取传感测量数据以及传感系统信息的传感器观测服务(Sensor Observation Service,SOS)等. ...
A dynamic observation capability index for quantitatively pre-evaluating diverse optical imaging satellite sensors
1
2013
... 对空天协同对地观测进行建模,并获取对地观测平台的运行状态、观测效能、关联关系等方面的语义信息对决策制定、任务规划等活动至关重要.地理空间传感网(Geospatial Sensor Web,GSW)作为一种新的时空信息基础设施,能够管理、集成和共享各种传感器资源,并为多平台协同观测提供支持[8 ] ,由此也产生了一系列研究成果,包括用于卫星传感器评估的传感器静态能力检索(Sensor Static Capability Index,SSCI)[9 ] 和动态观测能力检索 (Dynamic Observation Capability Index,DOCI)[10 ] 以及能够描述各类异构传感器的地理空间传感网原型系统,如GeoSensor[11 ] 、GeoCENS[12 ] 等.为了实现对地观测异构传感器网络连接和资源共享,开放地理空间信息联盟(Open Geospatial Consortium,OGC)建立了专门面向各类传感器的网络整合框架(Sensor Web Enablement,SWE),实现传感器资源的注册、查找、应用及观测数据的订阅和发布[7 ] .SWE包括一系列信息和功能模型,如为描述传感器和传感器观测处理方法提供通用模型和编码结构的传感器建模语言(Sensor Model Language,SensorML)、为传感器调度提供各类信息的传感器调度服务(Sensor Planning Service,SPS)、辅助获取传感测量数据以及传感系统信息的传感器观测服务(Sensor Observation Service,SOS)等. ...
地理空间传感网信息公共服务平台的设计与实现
1
2013
... 对空天协同对地观测进行建模,并获取对地观测平台的运行状态、观测效能、关联关系等方面的语义信息对决策制定、任务规划等活动至关重要.地理空间传感网(Geospatial Sensor Web,GSW)作为一种新的时空信息基础设施,能够管理、集成和共享各种传感器资源,并为多平台协同观测提供支持[8 ] ,由此也产生了一系列研究成果,包括用于卫星传感器评估的传感器静态能力检索(Sensor Static Capability Index,SSCI)[9 ] 和动态观测能力检索 (Dynamic Observation Capability Index,DOCI)[10 ] 以及能够描述各类异构传感器的地理空间传感网原型系统,如GeoSensor[11 ] 、GeoCENS[12 ] 等.为了实现对地观测异构传感器网络连接和资源共享,开放地理空间信息联盟(Open Geospatial Consortium,OGC)建立了专门面向各类传感器的网络整合框架(Sensor Web Enablement,SWE),实现传感器资源的注册、查找、应用及观测数据的订阅和发布[7 ] .SWE包括一系列信息和功能模型,如为描述传感器和传感器观测处理方法提供通用模型和编码结构的传感器建模语言(Sensor Model Language,SensorML)、为传感器调度提供各类信息的传感器调度服务(Sensor Planning Service,SPS)、辅助获取传感测量数据以及传感系统信息的传感器观测服务(Sensor Observation Service,SOS)等. ...
地理空间传感网信息公共服务平台的设计与实现
1
2013
... 对空天协同对地观测进行建模,并获取对地观测平台的运行状态、观测效能、关联关系等方面的语义信息对决策制定、任务规划等活动至关重要.地理空间传感网(Geospatial Sensor Web,GSW)作为一种新的时空信息基础设施,能够管理、集成和共享各种传感器资源,并为多平台协同观测提供支持[8 ] ,由此也产生了一系列研究成果,包括用于卫星传感器评估的传感器静态能力检索(Sensor Static Capability Index,SSCI)[9 ] 和动态观测能力检索 (Dynamic Observation Capability Index,DOCI)[10 ] 以及能够描述各类异构传感器的地理空间传感网原型系统,如GeoSensor[11 ] 、GeoCENS[12 ] 等.为了实现对地观测异构传感器网络连接和资源共享,开放地理空间信息联盟(Open Geospatial Consortium,OGC)建立了专门面向各类传感器的网络整合框架(Sensor Web Enablement,SWE),实现传感器资源的注册、查找、应用及观测数据的订阅和发布[7 ] .SWE包括一系列信息和功能模型,如为描述传感器和传感器观测处理方法提供通用模型和编码结构的传感器建模语言(Sensor Model Language,SensorML)、为传感器调度提供各类信息的传感器调度服务(Sensor Planning Service,SPS)、辅助获取传感测量数据以及传感系统信息的传感器观测服务(Sensor Observation Service,SOS)等. ...
GeoCENS: a geospatial cyberinfrastructure for the world-wide sensor web
1
2013
... 对空天协同对地观测进行建模,并获取对地观测平台的运行状态、观测效能、关联关系等方面的语义信息对决策制定、任务规划等活动至关重要.地理空间传感网(Geospatial Sensor Web,GSW)作为一种新的时空信息基础设施,能够管理、集成和共享各种传感器资源,并为多平台协同观测提供支持[8 ] ,由此也产生了一系列研究成果,包括用于卫星传感器评估的传感器静态能力检索(Sensor Static Capability Index,SSCI)[9 ] 和动态观测能力检索 (Dynamic Observation Capability Index,DOCI)[10 ] 以及能够描述各类异构传感器的地理空间传感网原型系统,如GeoSensor[11 ] 、GeoCENS[12 ] 等.为了实现对地观测异构传感器网络连接和资源共享,开放地理空间信息联盟(Open Geospatial Consortium,OGC)建立了专门面向各类传感器的网络整合框架(Sensor Web Enablement,SWE),实现传感器资源的注册、查找、应用及观测数据的订阅和发布[7 ] .SWE包括一系列信息和功能模型,如为描述传感器和传感器观测处理方法提供通用模型和编码结构的传感器建模语言(Sensor Model Language,SensorML)、为传感器调度提供各类信息的传感器调度服务(Sensor Planning Service,SPS)、辅助获取传感测量数据以及传感系统信息的传感器观测服务(Sensor Observation Service,SOS)等. ...
基本形式化本体的研究进展
1
2018
... 本体概念最初诞生于哲学领域,并被引入人工智能、知识工程等领域,其内涵从最初的一种研究存在的科学,已演变为元数据及其相关关系的规范,以及对概念模型明确的规范说明[13 ] .本体能够利用复杂和丰富的语义关系对领域内各种资源进行描述,并构建易于人和机器理解的语义[14 ] . ...
基本形式化本体的研究进展
1
2018
... 本体概念最初诞生于哲学领域,并被引入人工智能、知识工程等领域,其内涵从最初的一种研究存在的科学,已演变为元数据及其相关关系的规范,以及对概念模型明确的规范说明[13 ] .本体能够利用复杂和丰富的语义关系对领域内各种资源进行描述,并构建易于人和机器理解的语义[14 ] . ...
基于BFO构建中文植物物种多样性领域本体的研究
1
2015
... 本体概念最初诞生于哲学领域,并被引入人工智能、知识工程等领域,其内涵从最初的一种研究存在的科学,已演变为元数据及其相关关系的规范,以及对概念模型明确的规范说明[13 ] .本体能够利用复杂和丰富的语义关系对领域内各种资源进行描述,并构建易于人和机器理解的语义[14 ] . ...
基于BFO构建中文植物物种多样性领域本体的研究
1
2015
... 本体概念最初诞生于哲学领域,并被引入人工智能、知识工程等领域,其内涵从最初的一种研究存在的科学,已演变为元数据及其相关关系的规范,以及对概念模型明确的规范说明[13 ] .本体能够利用复杂和丰富的语义关系对领域内各种资源进行描述,并构建易于人和机器理解的语义[14 ] . ...
Functions in basic formal ontology
1
2016
... 空天协同对地观测涉及天基和空基对地观测平台,不同平台时空特性不同.为了在统一时空基准下实现空天协同对地观测语义信息的综合描述,并反映其动态变化,本文选取基本形式本体(Basic Formal Ontology,BFO)作为上位本体构建空天协同对地观测平台领域本体.BFO[15 -16 ] 是一个服务于科学领域数据检索与分析的顶层本体,可以从多维空间角度对事物进行集成、分类,并表征事物的静态与动态、空间与时间特征.基于BFO,通过分析空天协同对地观测活动中不同平台所包含的属性、状态、行为等要素,本文构建面向空天协同对地观测平台的领域本体(Space-Aero-Cooperative Observation Ontology,SACO2),并将其描述为六元组: ...
基本形式化本体及其中文版介绍
1
2021
... 空天协同对地观测涉及天基和空基对地观测平台,不同平台时空特性不同.为了在统一时空基准下实现空天协同对地观测语义信息的综合描述,并反映其动态变化,本文选取基本形式本体(Basic Formal Ontology,BFO)作为上位本体构建空天协同对地观测平台领域本体.BFO[15 -16 ] 是一个服务于科学领域数据检索与分析的顶层本体,可以从多维空间角度对事物进行集成、分类,并表征事物的静态与动态、空间与时间特征.基于BFO,通过分析空天协同对地观测活动中不同平台所包含的属性、状态、行为等要素,本文构建面向空天协同对地观测平台的领域本体(Space-Aero-Cooperative Observation Ontology,SACO2),并将其描述为六元组: ...
基本形式化本体及其中文版介绍
1
2021
... 空天协同对地观测涉及天基和空基对地观测平台,不同平台时空特性不同.为了在统一时空基准下实现空天协同对地观测语义信息的综合描述,并反映其动态变化,本文选取基本形式本体(Basic Formal Ontology,BFO)作为上位本体构建空天协同对地观测平台领域本体.BFO[15 -16 ] 是一个服务于科学领域数据检索与分析的顶层本体,可以从多维空间角度对事物进行集成、分类,并表征事物的静态与动态、空间与时间特征.基于BFO,通过分析空天协同对地观测活动中不同平台所包含的属性、状态、行为等要素,本文构建面向空天协同对地观测平台的领域本体(Space-Aero-Cooperative Observation Ontology,SACO2),并将其描述为六元组: ...
基于本体的遥感数据需求文本时间获取及其语义计算
2
2021
... 时间要素(T )能够提供统一的时间基准,分为零维时间域的时间点和一维时间域的时间段.时间点是时间的最小组成部分,而时间段是由2个时间点构成的时间区间,可采用绝对时间、相对时间和持续时间描述[17 ] .其中,绝对时间描述指能够在时间轴上定位的时间,如2021年11月14日;相对时间描述指以绝对时间为基准,通过时间拓扑关系进行定位的描述,如昨天;持续时间描述是指以某个时间点为原点,向前或向后连续的某个时间段,如本周一至今.利用时间要素,结合时间拓扑关系,通过时间语义计算,可以建立时间、时间关系与时间语义之间的映射关系,从而构建时间描述语句. ...
... 明确时间单位是建立时间关系的前提.空天协同对地观测活动中,时间关系可分为时间点关系、时间段关系以及时间点和时间段关系,而不同时间关系又包括相离、相等、相交、包含、相接5种拓扑关系[17 ] 以及不同事物在时间维度上发生的先后关系[18 ] . ...
基于本体的遥感数据需求文本时间获取及其语义计算
2
2021
... 时间要素(T )能够提供统一的时间基准,分为零维时间域的时间点和一维时间域的时间段.时间点是时间的最小组成部分,而时间段是由2个时间点构成的时间区间,可采用绝对时间、相对时间和持续时间描述[17 ] .其中,绝对时间描述指能够在时间轴上定位的时间,如2021年11月14日;相对时间描述指以绝对时间为基准,通过时间拓扑关系进行定位的描述,如昨天;持续时间描述是指以某个时间点为原点,向前或向后连续的某个时间段,如本周一至今.利用时间要素,结合时间拓扑关系,通过时间语义计算,可以建立时间、时间关系与时间语义之间的映射关系,从而构建时间描述语句. ...
... 明确时间单位是建立时间关系的前提.空天协同对地观测活动中,时间关系可分为时间点关系、时间段关系以及时间点和时间段关系,而不同时间关系又包括相离、相等、相交、包含、相接5种拓扑关系[17 ] 以及不同事物在时间维度上发生的先后关系[18 ] . ...
2
2014
... 明确时间单位是建立时间关系的前提.空天协同对地观测活动中,时间关系可分为时间点关系、时间段关系以及时间点和时间段关系,而不同时间关系又包括相离、相等、相交、包含、相接5种拓扑关系[17 ] 以及不同事物在时间维度上发生的先后关系[18 ] . ...
... 空天协同对地观测任务中空间关系包括方位关系、拓扑关系和距离关系[18 -19 ] . ...
2
2014
... 明确时间单位是建立时间关系的前提.空天协同对地观测活动中,时间关系可分为时间点关系、时间段关系以及时间点和时间段关系,而不同时间关系又包括相离、相等、相交、包含、相接5种拓扑关系[17 ] 以及不同事物在时间维度上发生的先后关系[18 ] . ...
... 空天协同对地观测任务中空间关系包括方位关系、拓扑关系和距离关系[18 -19 ] . ...
群组目标空间方向关系建模
1
2018
... 空天协同对地观测任务中空间关系包括方位关系、拓扑关系和距离关系[18 -19 ] . ...
群组目标空间方向关系建模
1
2018
... 空天协同对地观测任务中空间关系包括方位关系、拓扑关系和距离关系[18 -19 ] . ...
语义尺度影响的相离区域合并与拓扑关系计算
1
2018
... 空间拓扑关系主要描述满足拓扑几何学原理的各个要素之间的关系,主要表现为点、线、面、体之间的拓扑关系.本文主要关注对地观测平台地面覆盖区域与地面目标区域之间、天基对地观测平台星下点与地面目标区域之间、空基对地观测平台部署位置与地面目标区域之间的空间拓扑关系,并采用应用广泛的9交模型(9 Intersection Model,9IM)进行量化描述[20 ] ,如式(2)所示. ...
语义尺度影响的相离区域合并与拓扑关系计算
1
2018
... 空间拓扑关系主要描述满足拓扑几何学原理的各个要素之间的关系,主要表现为点、线、面、体之间的拓扑关系.本文主要关注对地观测平台地面覆盖区域与地面目标区域之间、天基对地观测平台星下点与地面目标区域之间、空基对地观测平台部署位置与地面目标区域之间的空间拓扑关系,并采用应用广泛的9交模型(9 Intersection Model,9IM)进行量化描述[20 ] ,如式(2)所示. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}