1 引言
多旋翼无人机相较传统航测型固定翼无人机具有场地要求小、可多次快速起飞航测等优点,在轻小型无人机遥感组网系统中得到越来越多的应用[1 ] 。但是此类遥测无人机大多属于低成本无人机,其位置与姿态系统(POS)较少采用差分GPS,特别是高程值存在误差过大现象,严重影响到无人机遥感组网飞行安全和航测作业,同时也增大了航测事后处理复杂度[2 ,3 ] 。为保障无人机高程安全监测系统的可靠性和准确性,本文结合无人机的INS/GPS/气压计提出了多源信息融合的冗余容错测量方案。
容错控制技术最早是由美籍匈牙利数学家冯·诺依曼提出的,主要思想是通过采用缜密的设计和质量控制方法来尽量减少故障出现的概率,以冗余资源为代价来换取可靠性[4 ] 。而在轻小型无人机遥感组网系统中,复杂多变的工作环境对无人机的可靠性与容错能力提出了更高的要求,使用冗余容错飞行控制技术是提高安全可靠性的重要途径之一[5 ] 。由于单一的导航测量模式无法实现小型无人机遥感组网系统对导航参数的高可靠性和高精度的测量,只能通过采用多传感器容错导航技术来提高组合测量系统的性能[6 ] ,采用具有不同工作特性的导航传感器系统构成自适应的容错多传感器的自主导航系统,进一步提升轻小型无人机的综合性能,从而保证其能够准确可靠地完成航测、组网等任务。
合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点。随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] 。在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置。而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] 。李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计。上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性。
本文从滤波精度和容错性2个方面出发,对联邦滤波算法进行了分析,得出能提高组合导航系统容错性及子系统滤波精度的信息分配系数取值原则。鉴于传统联邦滤波结构中的故障隔离模块会将检测到的故障隔离掉[16 ] ,从而造成故障子系统的有用信息丢失的缺点,本文采用了不带故障隔离模块的联邦滤波结构。在此基础上,提出了一种基于信息熵的Pignistic概率转换容错信息分配方法来提高无人机高程融合测量系统的精度及容错性。
2 信息分配系数对融合滤波精度的影响
2.1 多源信息融合的低成本测量方案
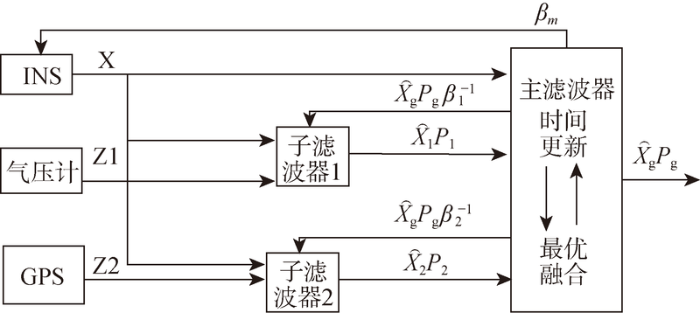
Carlson于1988年提出了一种基于分散化滤波思想的联邦滤波理论,该理论描述的联邦滤波结构是由一个公共主系统和若干子系统共同组成,从而构成了组合导航系统。其中各个子系统的量测量分别通过子滤波器中的kalman滤波算法得到局部估计结果,这些结果再由主滤波器进行融合处理,即可得到系统的全局最优估计[17 ,18 ] 。有反馈式的联邦滤波结构还需要通过信息分配把全局最优估计和系统噪声分配给各个子滤波器。因此,本文以无人机的惯性导航系统(INS)为主参考系统,结合GPS和气压计实现了多源信息高程测量方案,如图1 所示。
图1 多源高程信息融合系统联邦滤波器结构
Fig. 1 Federated filter structure for multi-source altitude information fusion systems
2.2 联邦滤波算法信息分配系数分析
信息分配过程是联邦滤波算法中的重要一环,信息分配系数的不同将直接改变联邦滤波器的性能,它也是联邦滤波自适应改进的主要着力点,因此得出提高系统容错性的信息分配系数取值原则尤为重要。
对于系统的离散状态空间模型可描述为:
X ( k ) = Φ ( k , k - 1 ) X ( k - 1 ) + Γ ( k , k - 1 ) W ( k - 1 ) Z ( k ) = Η ( k ) X ( k ) + V ( k )
式中: X ( k ) tk 时刻的状态向量; Z ( k ) Φ ( k , k - 1 ) tk -1 时刻到下一时刻tk 的状态转移矩阵; Γ ( k - 1 ) H ( k ) W ( k ) V ( k ) W ( k ) Q ( k ) V ( k ) R ( k )
联邦滤波算法可概括为信息分配、时间更新、量测更新和估计融合4个过程:
(1)信息分配和重置过程:将全局最优结果( X g ( k ) Q g ( k ) P g ( k ) β i X i ( k )
Q - 1 ( k ) = β i ( k ) Q g - 1 ( k ) P i - 1 ( k ) = β i ( k ) P g - 1 ( k ) X ˆ i ( k ) = X ˆ g ( k )
其中, β i i =1, 2, …, n , m )为各个子滤波器的信息分配系数,还需满足 ∑ i = 1 n β i + β m = 1
(2)信息时间更新过程:将系统状态与估计误差协方差按系统转移矩阵进行转移,在各个子滤波器和主滤波器中独立进行。
X ˆ i ( k , k - 1 ) = Φ ( k , k - 1 ) X ˆ i ( k - 1 )
P i ( k , k - 1 ) = Φ ( k , k - 1 ) P i ( k - 1 ) Φ T ( k , k - 1 ) + Q ( k - 1 )
(3)信息测量更新过程:此过程只在子滤波器中进行,主滤波器不参与测量。
P i - 1 ( k ) = P i - 1 ( k , k - 1 ) + H i T ( k ) R i - 1 ( k ) H i ( k )
P i - 1 ( k ) X ˆ i ( k ) = P i - 1 ( k , k - 1 ) X ˆ i ( k , k - 1 ) + H i T ( k ) R i - 1 ( k ) Z i ( k )
(4)信息融合:将各个子滤波器的局部滤波结果送入主滤波器进行融合。
X ˆ g = P g ∑ i = 1 n , m P i - 1 X ˆ i
P g = ∑ i = 1 n , m P i - 1 - 1
由以上各式可推得k +1时刻主滤波器的最优融合结果。则可导出组合测量的融合结果为:
X ˆ g ( k + 1 ) = P g ( k + 1 ) ∑ i = 1 n , m P i - 1 ( k + 1 ) X ˆ i ( k + 1 ) = P g ( k + 1 ) ∑ i = 1 n , m P g - 1 ( k + 1 , k ) Φ ( k + 1 , k ) X ˆ g ( k ) + H i T ( k + 1 ) R i - 1 ( k + 1 ) Z i ( k + 1 )
现设有一个联邦滤波系统,主滤波器只起融合作用,不参与量测,2个子系统气压计、GPS分别用a和b表示,假设,子系统a在k +1时刻发生故障,设量测值为: Z a ( k + 1 ) k +1时刻子系统a的量测值包含有一定的故障量。令 Z a ( k + 1 ) = Z ar ( k + 1 ) + γ Z ar ( k + 1 ) γ
X ˆ gr ( k + 1 ) = X ˆ g ( k + 1 ) + P g ( k + 1 ) H a T ( k + 1 ) R a - 1 ( k + 1 ) γ
k +2时刻无故障子滤波器b 的滤波结果为:
X ˆ br ( k + 2 ) = P b ( k + 2 ) β b ( k + 1 ) P g - 1 ( k + 2 , k + 1 ) × Φ ( k + 2 , k + 1 ) X ˆ gr ( k + 1 ) + P b ( k + 2 ) H b T ( k + 2 ) × R b - 1 ( k + 2 ) Z b ( k + 2 )
将式(10)带入式(11)得:
X ˆ br ( k + 2 ) = P b ( k + 2 ) β b ( k + 1 ) P g - 1 ( k + 2 , k + 1 ) × Φ ( k + 2 , k + 1 ) X ˆ g ( k + 1 ) + P b ( k + 2 ) H b T ( k + 2 ) R b - 1 ( k + 2 ) Z b ( k + 2 ) + P b ( k + 2 ) β b ( k + 1 ) P g - 1 ( k + 2 , k + 1 ) P g ( k + 1 ) × Φ ( k + 2 , k + 1 ) H a Γ ( k + 1 ) R a - 1 ( k + 1 ) γ
令 X ˆ br ( k + 2 ) = X ˆ b ( k + 2 ) + X ˆ bf ( k + 2 )
其中,
X ˆ bf ( k + 2 ) = P b ( k + 2 ) β b ( k + 1 ) P g - 1 ( k + 2 , k + 1 ) · Φ ( k + 2 , k + 1 ) P g ( k + 1 ) H a T ( k + 1 ) R a - 1 ( k + 1 ) γ
式(13)为故障子系统a对无故障子系统b造成的污染量。
由式(4)和式(5)得:
P b - 1 ( k + 2 ) = β b ( k + 1 ) P g - 1 ( k + 2 , k + 1 ) + H b T ( k + 2 ) R b - 1 ( k + 2 ) H b ( k + 2 )
将式(14)带入式(13)得:
X ˆ bf ( k + 2 ) = P g - 1 ( k + 2 , k + 1 ) + β b - 1 ( k + 1 ) × H b Γ ( k + 2 ) R b - 1 ( k + 2 ) H b ( k + 2 ) - 1 × P g - 1 ( k + 2 , k + 1 ) Φ ( k + 2 , k + 1 ) × P g ( k + 1 ) H a Γ ( k + 1 ) R a - 1 ( k + 1 ) γ
由式(9)及式(15)可知,不同的信息分配系数不会影响主滤波器的状态估计,而会对其他无故障子滤波器的滤波精度会造成影响,且无故障子系统信息分配系数越小所受的污染量越小。因此,在确定滤波精度权重基础上,动态信息分配系数的取值原则主要从容错性方面入手,尽量使无故障子系统信息分配系数小,故障子系统信息分配系数大。基于这一信息分配系数的选取原则,本文提出了一种基于信息熵的Pignistic概率转换容错信息分配算法。
3 融合滤波算法信息分配系数的计算
本文研究的信息分配系数主要是基于故障概率分布来计算。该过程首先需要搭建出一个对应的完备故障模板库;其次通过隶属度函数得出故障子系统的故障特征与故障库中各个故障模板的匹配度;再由改进的Pignistic概率转换得出准确的故障概率分布,基于此概率分布使用信息熵计算出子系统发生故障的概率;最后结合对联邦滤波理论推导结果中信息分配系数的选取原则,计算出能使系统容错性更好的信息分配系数。
3.1 故障模板的匹配度
在实际的量测或实验中,由于受测量环境、场合、地点等因素的影响,测得的实验数据会具有随机误差和故障模糊性,因此可以从实验数据中提取故障特征来构造隶属度函数,从而与模板隶属度函数库做匹配,得出其隶属于各种运行故障的概 率[19 ] 。由于无人机组合测量系统的传感器误差可近似为白噪声,其量测值具有高斯分布的形式,因此本文考虑使用正态分布结构来构造隶属度函数。
(1)首先确定模板隶属度函数库:利用实验或仿真手段模拟组合导航中各个子系统的各种故障运行模式。具体做法为在一种故障运行状态模式下的相同时间间隔内连续观测200次量测数据,将其作为一组,并进行5组测量,然后计算出每组测量值的平均值 M k σ k k =1, 2, 3, 4, 5。利用 M k σ k [19 ] (此方法同样用于待检子系统隶属度函数的确定)
μ F (χ k ) = exp - ( χ k - M a ) 2 2 σ a 2 χ k < M a 1 M a < χ k < M b exp - ( χ k - M b ) 2 2 σ b 2 χ k > M b
式中: χ k M a = min ( M k ) M b = max ( M k ) σ a σ b M a M b
(2)其次确定待检隶属度函数为,如式(17)。
μ ( χ ) = exp - ( χ - M ) 2 2 σ 2
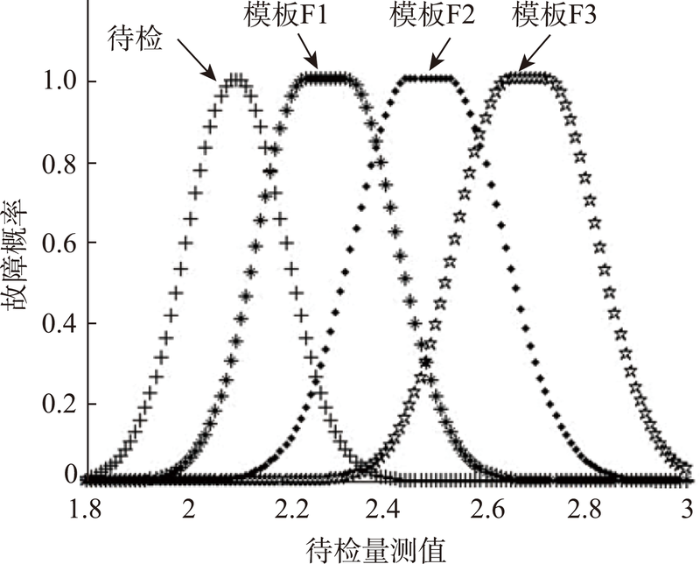
σ M χ 图2 为一个子系统的多个故障模板隶属度函数所构成的故障模板库及所测数据构造的待检隶属度函数。
图2 测量子系统故障的待检函数与模板库
Fig. 2 Pending function and template library of the measuring subsystem faults
其中,待检子系统的故障隶属于各种故障的隶属度可由图2 中待检隶属度函数与模板隶属度函数交点的纵坐标大小 μ
3.2 故障概率分布计算
3.2.1 Pignistic概率转换原理
设有一个故障模板集合 Θ Θ m ( A ) : 2 Θ → [ 0,1 ] ∑ A ∈ Θ m ( A ) = 1 m ( φ ) = 0
信度函数 Bel ( A ) ∀ A ∈ Θ
Bel ( A ) = ∑ B ∈ Θ m ( B )
似真函数 Pls ( A ) ∀ A ∈ Θ
Pls ( A ) = ∑ A ∩ B ≠ φ m ( B )
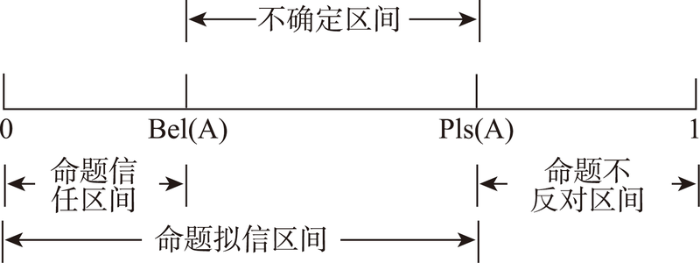
综上可知, Pls ( A ) ≥ Bel ( A ) Pls ( A ) - Bel ( A ) 图3 所示。不确定度产生的原因是 Θ [20 ] ,于本文为模糊不清的多可能性故障,如 Θ = { ABC ( AB ) ( AC ) ( BC ) ( ABC ) }
图3 子系统发生A故障的信度区间
Fig. 3 Confidence intervals of class A faults in subsystems
由式(18)可知,对于多元素命题的 Bel [21 ] 。
Pignistic概率转换定义:Smets推导出在多元素命题中每个元素出现的概率是一样的,因此把多元素命题的BPA平均分配给所包含的元素[22 ] :
BetP ( A ) = ∑ A ∈ A M 1 A M m ( A M )
式中: A M A M
由式(20)得子系统出现A类故障的概率为:
P ( A ) = Bel ( A ) + BetP ( A )
由上可知Pignistic概率转换的目的是为了得出子系统所发生故障隶属于各种故障的概率分布,但是Semts提出的Pignistic概率转换方法,对多元素命题的BPA采取了平均分配的方式,这会使信息发生丢失,而且只选取了 Bel
3.2.2 Pignistic概率转换方法改进
Semts提出的Pignistic概率转换方法中仅仅选择了BPA作为转换依据,这种仅使用一种数据做转换的方法是十分片面的。 Bel Pls Bel Pls Pls Bel
将含有单元素故障 A i Bel C i C i = Pls ( A i ) - Bel ( A i ) ε i ε i Bel Pls
ε i = Bel ( A i ) ∑ Bel ( A i ) × Pls ( A i ) ∑ Pls ( A i )
则子系统故障类型隶属于命题 A i
P ( A i ) = Bel ( A i ) + ε i C i = Bel ( A i ) + Bel ( A i ) ∑ Bel ( A i ) × Pls ( A i ) ∑ Pls ( A i ) × Pls ( A i ) - Bel ( A i ) ( 23 )
3.3 基于信息熵的信息分配系数的确定
信息熵从平均意义上表征了信源整体信息的统计特征,是信源状态不确定性的描述,这使其在故障诊断方面的应用十分广泛[23 ,24 ] 。由香农定义的信息熵的计算公式可知,信息熵描述的是信源的平均信息量。
H ( X ) = E [ I ( x i ) ] = E [ - log P ( x i ) ] = - ∑ i = 1 n P ( x i ) log P ( x i )
式中: X X 1 X 2 X n I ( x i ) x i P ( x i ) x i H ( X ) X
由以上改进的Pignistic概率转换函数得出更加精确的故障概率分布,通过信息熵计算概率分布不均匀程度,得出子系统故障概率大小,即转换得到的概率分布越不均匀,信息熵越小,则子系统故障概率越大。因此,可得到子系统各种故障的概率分布的信息熵 H n P ( A i )
H n = E [ - log P ( A i ) ] = - ∑ i = 1 N P ( A i ) log P ( A i )
式中: N β n
β n = 1 - H n / ∑ n = 1 N H n
4 算法验证
4.1 仿真算例
高度测量传感器子系统1和子系统2的线性系统模型如式(27)所示。
X i ( k ) = Φ ( k , k - 1 ) X i ( k - 1 ) + W ( k ) Z i ( k ) = H i ( k ) X i ( k ) + V i ( k )
式中: X i ( k ) Z i ( k ) Φ ( k , k - 1 ) = 1 Q = 0.01 R = 0.25 W = sqrt ( Q ) × ran dn ( 1 , N ) V = sqrt ( R ) × randn ( 1 , N ) H = 1
设系统滤波时间为200步,假设子系统2在运行100步后发生故障,再运行50步后恢复正常,系统的主滤波器不进行量测,只起融合作用,即 β m = 0
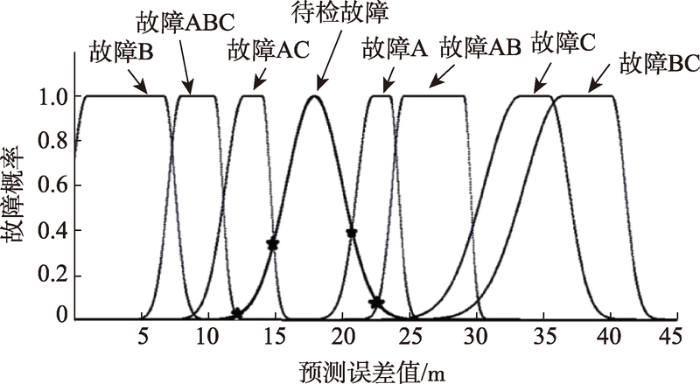
本文通过simulink和MATLAB编程搭建了无人机置于高度300 m悬停或飞行进行测量时的故障库,进而通过模拟子系统2的故障数据,与故障库做匹配,得出子系统2隶属于各种故障的概率分布。图4 为一次模拟结果。
图4 高程测量系统故障库
Fig. 4 Fault library of altitude measurement system
由本文的计算方法可得2个子系统的信息分配系数分别为: β 1 = 0.1417 β 2 = 0.8583
方法1 故障子系统比无故障子系统信息分配系数小,不妨设: β 1 = 0.8000 β 2 = 0.2000
方法2 信息分配系数平均分配: β 1 = 0.5000 β 2 = 0.5000
方法3 本文信息系数分配算法: β 1 = 0.1417 β 2 = 0.8583
仿真结果如图5 -图7 所示。
图5 主滤波器高度估计误差
Fig. 5 Height estimation errors of main filters
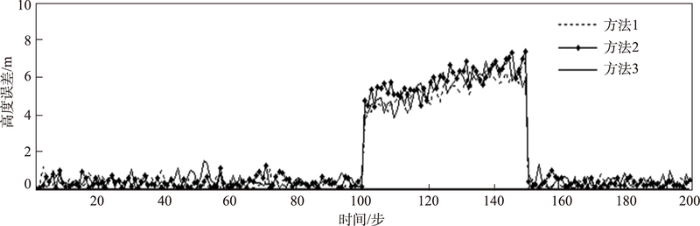
图6 子滤波器1高度估计误差
Fig. 6 Height estimation errors of sub filter 1
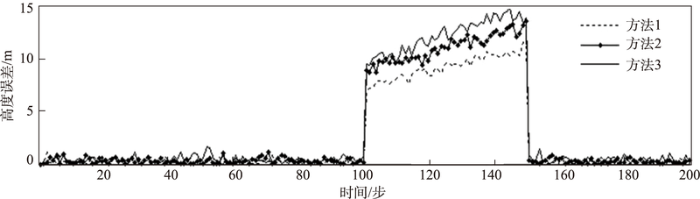
图7 子滤波器2高度估计误差
Fig. 7 Height estimation errors of sub filter 2
(1)由图5 可知,方法1、2、3的不同的信息分配系数不会对主滤波器的状态估计精度造成影响。
(2)由图6 可知,相比于方法1、2,本文的信息分配方式在很大程度减小了故障子系对无故障子系统的污染程度,使无故障子滤波器的平均误差分别减小了1.034 m和0.396 m。
(3)由图7 可知,采用以上3种方法识别出的高度平局误差分别为:9.854、10.973和11.447 m,无故障子滤波器的信息分配系数越小则其滤波估计误差越小,故障子滤波器信息分配系数越大,系统容错性越好,采用本文的方法可以更容易识别出子系统故障,通过主滤波器的融合达到了提高联邦滤波系统容错性的目的。
4.2 飞行验证
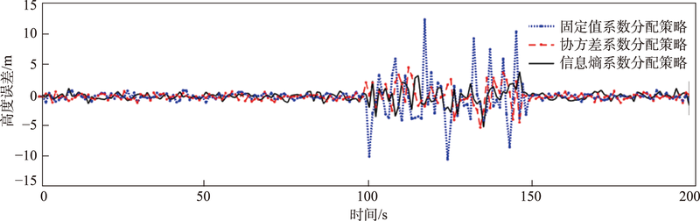
飞行实验采用无人机遥测重点实验室研制的六旋翼无人机平台来验证,该飞行平台搭载有惯性导航系统(INS)ADIS16355,GPS/BD双定位模块S1216,气压计BM1383模块,通过读取它们的数据进行融合滤波,共同完成无人机的高程测量。试验时分别采用传统联邦滤波器固定值系数信息分配策略、协方差信息分配策略[7 ] 和本文的信息熵分配策略对数据融合滤波,然后由地面设备设置无人机在300 m高度进行悬停,悬停100 s后关闭气压计模块来模拟子系统故障,悬停150 s后重新打开气压计模块,悬停200 s后无人机降落,整个过程通过地面站记录数传电台发回的无人机高度数据信息,实验结束后分别计算出无人机在300 m高度悬停状态下的高程误差,如图8 所示。
图8 不同信息分配策略下的无人机高程误差
Fig. 8 Elevation error of UAV under different information allocation strategies
由图8 和表1 可看出,3种信息融合分配策略在无故障时间段内误差大体相当,而在故障时间段内由于传统联邦滤波算法无法自适应调整信息分配系数,其误差主要受GPS/BD定位模块误差影响,远大于其他两种融合策略。本文提出的基于信息熵的Pignistic概率转换容错信息分配策略能更好地兼顾精度和容错性,融合后的高程误差略好于基于误差协方差矩阵的自适应信息分配策略。
5 结论
轻小型无人机遥感具有机动灵活、数据获取周期短等特点,能有效弥补传统遥感手段在数据获取方面的局限性,其结合移动通讯、人工智能等技术建立网络环境下数据驱动的空中移动无人机智能组网体系,实现无人机由单机向组网、人为控制向智能决策的跨越,不仅可以同时起飞多架次具备不同功能的遥感无人机,从而大大提高无人机遥感便捷大范围超高分辨率数据获取能力,而且能更大限度地利用无人航空器组网遥感观测推动对地观测技术发展。
为提高无人航空遥感安全系数,本文针对小型低成本航测无人机飞行的高程安全监测及其容错性设计了多传感器信息融合的测量方案。通过分析多源高程信息联邦滤波融合算法中信息分配、时间更新、量测更新和估计融合过程,得出了有利于联邦滤波系统容错性的信息系数分配策略。因此,在保证联邦滤波器融合精度不受影响的前提下,通过提高故障子滤波器的分配系数可以有效识别并隔离故障子系统,可减小其对无故障子滤波器的污染程度。另外,本文还通过改进Pignistic概率转换方法,基于故障特征得到清晰准确的故障概率分布,然后根据此概率分布运用信息熵来确定系统故障概率,进而结合信息分配系数的取值原则得出组合测量系统各个子系统的权重比。通过算例仿真验证了不同的信息分配系数主要影响子系统的估计误差和容错性能,而对联邦主滤波器的融合估计影响较小这一重要结论。通过六旋翼无人机定高悬停实验进一步证明了该方法能将无人机高程误差减小为传统联邦滤波算法的四分之一,高程测量结果能有效保障轻小型无人机的遥感组网任务。
随着高频次迅捷无人航空器区域组网遥感观测技术的应用,多源信息冗余容错技术不仅要寻求单机的硬件冗余控制和安全可靠性,更会向全网络结构构建方面发展。
The authors have declared that no competing interests exist.
参考文献
文献选项
[1]
赵培 ,王光彦 ,王之顺 ,等 .消费型无人机在低空航测中的可行性应用研究
[J].矿山测量 ,2018 ,46 (3 ):20 -22 .
URL
[本文引用: 1]
[Zhao P Wang G Y Wang Z S et al .Research on the feasibility application of consumer UAV in low-altitude aerial surveying
[J]. Mine Survey , 2018 ,46 (3 ):20 -22 . ]
URL
[本文引用: 1]
[2]
徐志豪 . 消费级无人机倾斜摄影三维建模可行性研究
[J].北京测绘 ,2018 ,32 (8 ):897 -904 .
URL
[本文引用: 1]
[Xu Z H Feasibility study on three dimensional modeling of tilting photography for consumer UAV
[J]. Bei
[J].ng Surveying and Mapping , 2008 ,32 (8 ):897 -904 . ]
URL
[本文引用: 1]
[3]
晏磊 ,吕书强 ,赵红颖 ,等 .无人机航空遥感系统关键技术研究
[J].武汉大学学报(工学版) ,2004 ,37 (6 ):67 -70 .
https://doi.org/10.3969/j.issn.1671-8844.2004.06.017
URL
[本文引用: 1]
摘要
简要分析了在我国发展无人机航空遥感系统的必要性和可行性,针对我国某型民用无人机,设计了无人机航空遥感信息平台的总体技术框架. 在此基础上,对构建无人机航空遥感信息平台所涉及的关键技术进行了分析. 指出高精度的组合导航、不同遥感传感器设备的集成、遥感数据机上处理与压缩以及遥感数据近实时传输等是实现无人机航空遥感信息平台的关键技术.
[Yan L Lv S Q Zhao H Y et al .Research on key techniques of aerial remote sensing system for unmanned aerial vehicles
[J]. Journal of Wuhan University (Engineering Edition) , 2004 ,37 (6 ):67 -70 . ]
https://doi.org/10.3969/j.issn.1671-8844.2004.06.017
URL
[本文引用: 1]
摘要
简要分析了在我国发展无人机航空遥感系统的必要性和可行性,针对我国某型民用无人机,设计了无人机航空遥感信息平台的总体技术框架. 在此基础上,对构建无人机航空遥感信息平台所涉及的关键技术进行了分析. 指出高精度的组合导航、不同遥感传感器设备的集成、遥感数据机上处理与压缩以及遥感数据近实时传输等是实现无人机航空遥感信息平台的关键技术.
[4]
And D Z Marta B From large chemical plant data to fault diagnosis integrated to decentralized fault-tolerant control: Pulp mill process application
[J]. Industrial & Engineering Chemistry Research , 2008 ,47 (4 ):1201 -1220 .
[本文引用: 1]
[5]
鹿强 ,吴琳 ,陈昭 ,等 .海上目标多源轨迹数据关联综述
[J].地球信息科学学报 ,2018 ,20 (5 ):571 -581 .
URL
[本文引用: 1]
[Li Q Wi L Chen Z et al .A review of multi-source trajectory data association for marine targets. Journal of Geo-information
Science , 2018 ,20 (5 ):571 -581 .]
URL
[本文引用: 1]
[6]
Jing L Wu J Hou J et al .Fault-tolerant integrated navigation algorithm of the federal Kalman filter
[J]. Advances in Future Computer and Control Systems. 2012 ,160 (1 ):621 -627 .
https://doi.org/10.1007/978-3-642-29390-0_99
URL
[本文引用: 1]
摘要
As the Federal Kalman filter has some good features such as flexibility, and good fault-tolerance, this paper proposes a federal Kalman filter design method and fault-tolerant structure. The structure uses the residual error between the local filter and reference filter for fault detection. In this paper, a simulation study of the integrated navigation system is done. The study shows that the algorithm is very simple, reliable, not only can quickly detect the fault of the external sensors and reference system, but also has good fault-tolerant. It can quickly detect and isolation fault, and let the integration of the system remain high precision.
[7]
Gao B Hu G Gao S et al .Multi-sensor optimal data fusion for INS/GNSS/CNS integration based on unscented Kalman filter
[J]. International
[J].urnal of Control Automation & Systems , 2018 ,16 (1 ):129 -140 .
[本文引用: 2]
[8]
Yang C Shi W Z Chen W Correlational inference-based adaptive unscented Kalman filter with application in GNSS/IMU integrated navigation
[J]. GPS Solutions , 2018 ,22 (4 ):100 -112 .
[本文引用: 1]
[9]
张亮 ,高井祥 ,李增科 .信息分配系数的自适应滤波在GPS/DR组合导航中的应用
[J].测绘科学技术学报 ,2015 ,32 (1 ):18 -21 .
URL
[本文引用: 1]
[Zhang L Gao J X Li Z K Application of adaptive filter based on information distribution coefficient to GPS/DR integrated navigation
[J]. Journal of Geomatics Science and Technology , 2015 ,32 (1 ):18 -21 . ]
URL
[本文引用: 1]
[10]
马传焱 ,熊智 ,许建新 ,等 .一种联邦滤波信息共享分配算法
[J].中国惯性技术学报 ,2013 ,21 (3 ):347 -353 .
URL
[本文引用: 1]
[Ma C Y Xiong Z Xu J X et al .Federated filter information sharing allocation algorithm
[J]. Journal of Chinese Inertial Technology , 2013 ,21 (3 ):347 -353 . ]
URL
[本文引用: 1]
[11]
段睿 ,张小红 ,朱锋 .多源信息融合的组合导航自适应联邦滤波算法
[J].系统工程与电子技术 ,2018 ,40 (2 ):267 -272 .
URL
[本文引用: 1]
[Duan R Zhang X H Zhu F Adaptive federated filter for multi-sources information fusion in integrated navigation system
[J]. Systems Engineering and Electronics , 2018 ,40 (2 ):267 -272 . ]
URL
[本文引用: 1]
[12]
李兆铭 ,杨文革 ,丁丹 ,等 .多终端仅测速实时定轨的自适应联邦STCKF算法
[J].系统工程与电子技术 ,2017 ,39 (1 ):177 -182 .
[本文引用: 1]
[Li Z M Yang W G Ding D et al .Adaptive federated STCKF algorithm for satellite orbit determination of multiple hand-held terminals
[J]. System Engineering and Electronics Technology , 2017 ,39 (1 ):177 -182 . ]
[本文引用: 1]
[13]
邓中亮 ,尹露 ,杨磊 ,等 .基于联邦卡尔曼的GPS/基站定位信息融合算法
[J].北京邮电大学报 ,2013 ,36 (6 ):32 -36 .
[本文引用: 1]
[Deng Z L Yin L Yang L et al .Location information fusion algorithm for GPS /Base-Station positioning system based on federated Kalman filter
[J]. Journal of Bei
[J].ng University of Posts & Telecommunications , 2013 ,36 (6 ):32 -36 . ]
[本文引用: 1]
[14]
尹露 ,邓中亮 ,席岳 .基于可信度的多源定位数据融合方法
[J].北京邮电大学学报 ,2014 ,37 (4 ):34 -38 .
URL
[本文引用: 1]
[Yin L Deng Z L Xi Y Credibility based data fusion algorithm for multi-positioning system
[J]. Journal of Bei
[J].ng University of Posts & Telecommunications , 2014 ,37 (4 ):34 -38 . ]
URL
[本文引用: 1]
[15]
Zhou W Wang Q University H E The INS/GNSS/CNS integrated navigation system based on vector information distribution
[J]. Journal of Harbin Institute of Technology , 2015 ,47 (4 ):99 -103 .
[本文引用: 1]
[16]
Zhu J Q Jin W D Zheng G et al .High-speed train running gear fault recognition based on information fusion of multi-source
[J]. Journal of Vibration & Shock , 2014 ,33 (21 ):183 -188 .
[本文引用: 1]
[17]
郭承军 . 多源组合导航系统信息融合关键技术研究
[D].成都:电子科技大学 ,2018 .
[本文引用: 1]
[Guo C J Key technical research of information fusion for multiple source integrated navigation system
[D]. Chengdu: University of electronic science and technology , 2018 . ]
[本文引用: 1]
[18]
袁赣南 ,袁克非 ,张红伟 ,等 .联邦滤波器信息分配原则的探讨
[J].中国航海 ,2012 ,35 (3 ):11 -15 .
[本文引用: 1]
[Yuan G N Yuan K F Zhang W H et al .Discussion of information sharing principle for federated filter
[J]. Navigation of China , 2012 ,35 (3 ):11 -15 . ]
[本文引用: 1]
[19]
徐晓滨 ,文成林 ,王迎昌 .基于模糊故障特征信息的随机集度量信息融合诊断方法
[J].电子与信息学报 ,2009 ,31 (7 ):1635 -1640 .
https://doi.org/10.3724/SP.J.1146.2008.00408
URL
Magsci
[本文引用: 2]
摘要
该文给出一种基于模糊故障特征信息随机集度量的信息融合诊断方法。针对信号采集与故障特征提取中的模糊性,首先用模糊隶属度函数分别表示故障档案库中的多种故障样板模式和从不同传感器观测中提取的多类故障特征亦即待检模式,进而基于模糊集的随机集模型,得到样板模式与待检模式的匹配度,即基本概率指派函数(BPA)。然后利用Dempster-Shafer证据组合规则对BPA进行融合,给出诊断结果。该文给出的待检模式是从多个连续观测中提取的,与原有的由单个观测确定待检模式的方式相比,文中提出的特征提取及匹配方法,同时考虑了样板模式和待检模式所具有的模糊性,能够显著降低融合决策中的不确定性,大大提高故障识别的能力。最后通过电机转子故障诊断实例验证方法的有效性。
[Xu X B Wen C L Wang Y C Information fusion algorithm of fault diagnosis based on random set metrics of fuzzy fault features
[J]. Journal of Electronics & Information Technology , 2009 ,31 (7 ):1635 -1640 . ]
https://doi.org/10.3724/SP.J.1146.2008.00408
URL
Magsci
[本文引用: 2]
摘要
该文给出一种基于模糊故障特征信息随机集度量的信息融合诊断方法。针对信号采集与故障特征提取中的模糊性,首先用模糊隶属度函数分别表示故障档案库中的多种故障样板模式和从不同传感器观测中提取的多类故障特征亦即待检模式,进而基于模糊集的随机集模型,得到样板模式与待检模式的匹配度,即基本概率指派函数(BPA)。然后利用Dempster-Shafer证据组合规则对BPA进行融合,给出诊断结果。该文给出的待检模式是从多个连续观测中提取的,与原有的由单个观测确定待检模式的方式相比,文中提出的特征提取及匹配方法,同时考虑了样板模式和待检模式所具有的模糊性,能够显著降低融合决策中的不确定性,大大提高故障识别的能力。最后通过电机转子故障诊断实例验证方法的有效性。
[20]
Jiang W Wu C Jia J et al .A probabilistic transformation of basic probability assignment (BPA) in D-S evidence theory
[J]. Journal of Northwestern Polytechnical University , 2013 ,31 (2 ):295 -299 .
[本文引用: 1]
[21]
马丽丽 ,张芬 ,陈金广 .一种基于Pignistic概率距离的合成公式
[J].计算机工程与应用 ,2015 ,51 (24 ):61 -66 .
Magsci
[本文引用: 1]
摘要
针对多证据源信息融合过程中证据源间存在的冲突问题,提出了一种基于Pignistic概率距离的合成公式。利用Pignistic概率距离构造证据可信度;再利用证据可信度修正证据体,以改进合成公式;利用改进的合成公式对证据源进行融合。算例结果表明,改进合成公式的融合结果合理有效,与其他方法相比有更好的适用性、可靠性和较快的运算速度。
[Ma L L Zhang F Chen J G Synthetic rule of evidence based on Pignistic probability distance
[J]. Computer Engineering & Applications , 2015 , 51 (24 ):61 -66 . ]
Magsci
[本文引用: 1]
摘要
针对多证据源信息融合过程中证据源间存在的冲突问题,提出了一种基于Pignistic概率距离的合成公式。利用Pignistic概率距离构造证据可信度;再利用证据可信度修正证据体,以改进合成公式;利用改进的合成公式对证据源进行融合。算例结果表明,改进合成公式的融合结果合理有效,与其他方法相比有更好的适用性、可靠性和较快的运算速度。
[22]
Smets P Constructing the Pignistic probability function in a context of uncertainty
[J]. Machine Intelligence & Pattern Recognition , 1990 ,10 (1 ):29 -39 .
[本文引用: 1]
[23]
钱华明 ,朱明 ,陈亮 .信息熵在导航传感器故障诊断中的应用研究
[J].系统仿真学报 ,2010 ,22 (S1 ):216 -219 .
URL
[本文引用: 1]
摘要
对组合导航系统中占主要地位的惯导系统进行故障诊断研究,给出了一种基于小波包能量熵的神经网络故障诊断方法。利用小波包分析原理对原始故障信号进行3层的小波包分解,并提取小波包能量熵,然后构造信号的小波包特征向量,以此向量作为故障样本对3层BP神经网络进行训练,实现智能化故障诊断。采用惯导系统中关键性器件陀螺仪进行仿真研究,仿真结果表明此方法可有效地检测故障且提高了精度。
[Qian H M Zhu M Chen L Information entropy for fault diagnosis of inertia navigation
[J]. Journal of System Simulation , 2010 ,22 (S1 ):216 -219 . ]
URL
[本文引用: 1]
摘要
对组合导航系统中占主要地位的惯导系统进行故障诊断研究,给出了一种基于小波包能量熵的神经网络故障诊断方法。利用小波包分析原理对原始故障信号进行3层的小波包分解,并提取小波包能量熵,然后构造信号的小波包特征向量,以此向量作为故障样本对3层BP神经网络进行训练,实现智能化故障诊断。采用惯导系统中关键性器件陀螺仪进行仿真研究,仿真结果表明此方法可有效地检测故障且提高了精度。
[24]
杨可明 ,魏华锋 ,刘飞 ,等 .以光谱信息熵改进的N-FINDR高光谱端元提取算法
[J].地球信息科学学报 ,2015 ,17 (8 ):979 -985 .
https://doi.org/10.3724/SP.J.1047.2015.00979
URL
Magsci
[本文引用: 1]
摘要
端元提取是高光谱混合像元分解的关键步骤,也是高光谱影像分析的重要前提。N-FINDR算法是一种经典且有效的端元提取算法,但其需遍历所有可能的像元组合,计算量巨大,时间效率不高。本文以光谱信息熵和凸面几何学理论,利用高光谱影像像元,在光谱特征空间形成的单形体顶点附近为相对纯净像元,单形体内部为混合像元的特性,提出了一种结合光谱信息熵的N-FINDR改进算法。该方法根据各波段像元灰度概率计算影像中每个像元的光谱信息熵,将大于光谱信息熵阈值的像元作为混合像元被剔除,在保留的像元组成的单形体上搜索最大体积,并提取最大体积顶点处像元作为端元。最后,使用美国EO-1卫星获取的江西省德兴某铜矿的Hyperion数据,对改进后的算法进行验证。结果表明,改进后的N-FINDR算法在确保较高端元提取精度的同时,大大提高了数据处理的时间效率。
[Yang K M Wei H F Liu F et al .Improved N-FINDR algorithm on hyperspectral endmember extraction based on spectral Shannon entropy. 2015 ,17 (8 ):979 -985 . ]
https://doi.org/10.3724/SP.J.1047.2015.00979
URL
Magsci
[本文引用: 1]
摘要
端元提取是高光谱混合像元分解的关键步骤,也是高光谱影像分析的重要前提。N-FINDR算法是一种经典且有效的端元提取算法,但其需遍历所有可能的像元组合,计算量巨大,时间效率不高。本文以光谱信息熵和凸面几何学理论,利用高光谱影像像元,在光谱特征空间形成的单形体顶点附近为相对纯净像元,单形体内部为混合像元的特性,提出了一种结合光谱信息熵的N-FINDR改进算法。该方法根据各波段像元灰度概率计算影像中每个像元的光谱信息熵,将大于光谱信息熵阈值的像元作为混合像元被剔除,在保留的像元组成的单形体上搜索最大体积,并提取最大体积顶点处像元作为端元。最后,使用美国EO-1卫星获取的江西省德兴某铜矿的Hyperion数据,对改进后的算法进行验证。结果表明,改进后的N-FINDR算法在确保较高端元提取精度的同时,大大提高了数据处理的时间效率。
消费型无人机在低空航测中的可行性应用研究
1
2018
... 多旋翼无人机相较传统航测型固定翼无人机具有场地要求小、可多次快速起飞航测等优点,在轻小型无人机遥感组网系统中得到越来越多的应用[1 ] .但是此类遥测无人机大多属于低成本无人机,其位置与姿态系统(POS)较少采用差分GPS,特别是高程值存在误差过大现象,严重影响到无人机遥感组网飞行安全和航测作业,同时也增大了航测事后处理复杂度[2 ,3 ] .为保障无人机高程安全监测系统的可靠性和准确性,本文结合无人机的INS/GPS/气压计提出了多源信息融合的冗余容错测量方案. ...
消费型无人机在低空航测中的可行性应用研究
1
2018
... 多旋翼无人机相较传统航测型固定翼无人机具有场地要求小、可多次快速起飞航测等优点,在轻小型无人机遥感组网系统中得到越来越多的应用[1 ] .但是此类遥测无人机大多属于低成本无人机,其位置与姿态系统(POS)较少采用差分GPS,特别是高程值存在误差过大现象,严重影响到无人机遥感组网飞行安全和航测作业,同时也增大了航测事后处理复杂度[2 ,3 ] .为保障无人机高程安全监测系统的可靠性和准确性,本文结合无人机的INS/GPS/气压计提出了多源信息融合的冗余容错测量方案. ...
消费级无人机倾斜摄影三维建模可行性研究
1
2008
... 多旋翼无人机相较传统航测型固定翼无人机具有场地要求小、可多次快速起飞航测等优点,在轻小型无人机遥感组网系统中得到越来越多的应用[1 ] .但是此类遥测无人机大多属于低成本无人机,其位置与姿态系统(POS)较少采用差分GPS,特别是高程值存在误差过大现象,严重影响到无人机遥感组网飞行安全和航测作业,同时也增大了航测事后处理复杂度[2 ,3 ] .为保障无人机高程安全监测系统的可靠性和准确性,本文结合无人机的INS/GPS/气压计提出了多源信息融合的冗余容错测量方案. ...
消费级无人机倾斜摄影三维建模可行性研究
1
2008
... 多旋翼无人机相较传统航测型固定翼无人机具有场地要求小、可多次快速起飞航测等优点,在轻小型无人机遥感组网系统中得到越来越多的应用[1 ] .但是此类遥测无人机大多属于低成本无人机,其位置与姿态系统(POS)较少采用差分GPS,特别是高程值存在误差过大现象,严重影响到无人机遥感组网飞行安全和航测作业,同时也增大了航测事后处理复杂度[2 ,3 ] .为保障无人机高程安全监测系统的可靠性和准确性,本文结合无人机的INS/GPS/气压计提出了多源信息融合的冗余容错测量方案. ...
无人机航空遥感系统关键技术研究
1
2004
... 多旋翼无人机相较传统航测型固定翼无人机具有场地要求小、可多次快速起飞航测等优点,在轻小型无人机遥感组网系统中得到越来越多的应用[1 ] .但是此类遥测无人机大多属于低成本无人机,其位置与姿态系统(POS)较少采用差分GPS,特别是高程值存在误差过大现象,严重影响到无人机遥感组网飞行安全和航测作业,同时也增大了航测事后处理复杂度[2 ,3 ] .为保障无人机高程安全监测系统的可靠性和准确性,本文结合无人机的INS/GPS/气压计提出了多源信息融合的冗余容错测量方案. ...
无人机航空遥感系统关键技术研究
1
2004
... 多旋翼无人机相较传统航测型固定翼无人机具有场地要求小、可多次快速起飞航测等优点,在轻小型无人机遥感组网系统中得到越来越多的应用[1 ] .但是此类遥测无人机大多属于低成本无人机,其位置与姿态系统(POS)较少采用差分GPS,特别是高程值存在误差过大现象,严重影响到无人机遥感组网飞行安全和航测作业,同时也增大了航测事后处理复杂度[2 ,3 ] .为保障无人机高程安全监测系统的可靠性和准确性,本文结合无人机的INS/GPS/气压计提出了多源信息融合的冗余容错测量方案. ...
From large chemical plant data to fault diagnosis integrated to decentralized fault-tolerant control:? Pulp mill process application
1
2008
... 容错控制技术最早是由美籍匈牙利数学家冯·诺依曼提出的,主要思想是通过采用缜密的设计和质量控制方法来尽量减少故障出现的概率,以冗余资源为代价来换取可靠性[4 ] .而在轻小型无人机遥感组网系统中,复杂多变的工作环境对无人机的可靠性与容错能力提出了更高的要求,使用冗余容错飞行控制技术是提高安全可靠性的重要途径之一[5 ] .由于单一的导航测量模式无法实现小型无人机遥感组网系统对导航参数的高可靠性和高精度的测量,只能通过采用多传感器容错导航技术来提高组合测量系统的性能[6 ] ,采用具有不同工作特性的导航传感器系统构成自适应的容错多传感器的自主导航系统,进一步提升轻小型无人机的综合性能,从而保证其能够准确可靠地完成航测、组网等任务. ...
海上目标多源轨迹数据关联综述
1
2018
... 容错控制技术最早是由美籍匈牙利数学家冯·诺依曼提出的,主要思想是通过采用缜密的设计和质量控制方法来尽量减少故障出现的概率,以冗余资源为代价来换取可靠性[4 ] .而在轻小型无人机遥感组网系统中,复杂多变的工作环境对无人机的可靠性与容错能力提出了更高的要求,使用冗余容错飞行控制技术是提高安全可靠性的重要途径之一[5 ] .由于单一的导航测量模式无法实现小型无人机遥感组网系统对导航参数的高可靠性和高精度的测量,只能通过采用多传感器容错导航技术来提高组合测量系统的性能[6 ] ,采用具有不同工作特性的导航传感器系统构成自适应的容错多传感器的自主导航系统,进一步提升轻小型无人机的综合性能,从而保证其能够准确可靠地完成航测、组网等任务. ...
海上目标多源轨迹数据关联综述
1
2018
... 容错控制技术最早是由美籍匈牙利数学家冯·诺依曼提出的,主要思想是通过采用缜密的设计和质量控制方法来尽量减少故障出现的概率,以冗余资源为代价来换取可靠性[4 ] .而在轻小型无人机遥感组网系统中,复杂多变的工作环境对无人机的可靠性与容错能力提出了更高的要求,使用冗余容错飞行控制技术是提高安全可靠性的重要途径之一[5 ] .由于单一的导航测量模式无法实现小型无人机遥感组网系统对导航参数的高可靠性和高精度的测量,只能通过采用多传感器容错导航技术来提高组合测量系统的性能[6 ] ,采用具有不同工作特性的导航传感器系统构成自适应的容错多传感器的自主导航系统,进一步提升轻小型无人机的综合性能,从而保证其能够准确可靠地完成航测、组网等任务. ...
Fault-tolerant integrated navigation algorithm of the federal Kalman filter
1
2012
... 容错控制技术最早是由美籍匈牙利数学家冯·诺依曼提出的,主要思想是通过采用缜密的设计和质量控制方法来尽量减少故障出现的概率,以冗余资源为代价来换取可靠性[4 ] .而在轻小型无人机遥感组网系统中,复杂多变的工作环境对无人机的可靠性与容错能力提出了更高的要求,使用冗余容错飞行控制技术是提高安全可靠性的重要途径之一[5 ] .由于单一的导航测量模式无法实现小型无人机遥感组网系统对导航参数的高可靠性和高精度的测量,只能通过采用多传感器容错导航技术来提高组合测量系统的性能[6 ] ,采用具有不同工作特性的导航传感器系统构成自适应的容错多传感器的自主导航系统,进一步提升轻小型无人机的综合性能,从而保证其能够准确可靠地完成航测、组网等任务. ...
International
2
2018
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
... 飞行实验采用无人机遥测重点实验室研制的六旋翼无人机平台来验证,该飞行平台搭载有惯性导航系统(INS)ADIS16355,GPS/BD双定位模块S1216,气压计BM1383模块,通过读取它们的数据进行融合滤波,共同完成无人机的高程测量.试验时分别采用传统联邦滤波器固定值系数信息分配策略、协方差信息分配策略[7 ] 和本文的信息熵分配策略对数据融合滤波,然后由地面设备设置无人机在300 m高度进行悬停,悬停100 s后关闭气压计模块来模拟子系统故障,悬停150 s后重新打开气压计模块,悬停200 s后无人机降落,整个过程通过地面站记录数传电台发回的无人机高度数据信息,实验结束后分别计算出无人机在300 m高度悬停状态下的高程误差,如图8 所示. ...
Correlational inference-based adaptive unscented Kalman filter with application in GNSS/IMU integrated navigation
1
2018
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
信息分配系数的自适应滤波在GPS/DR组合导航中的应用
1
2015
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
信息分配系数的自适应滤波在GPS/DR组合导航中的应用
1
2015
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
一种联邦滤波信息共享分配算法
1
2013
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
一种联邦滤波信息共享分配算法
1
2013
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
多源信息融合的组合导航自适应联邦滤波算法
1
2018
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
多源信息融合的组合导航自适应联邦滤波算法
1
2018
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
多终端仅测速实时定轨的自适应联邦STCKF算法
1
2017
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
多终端仅测速实时定轨的自适应联邦STCKF算法
1
2017
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
基于联邦卡尔曼的GPS/基站定位信息融合算法
1
2013
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
基于联邦卡尔曼的GPS/基站定位信息融合算法
1
2013
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
基于可信度的多源定位数据融合方法
1
2014
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
基于可信度的多源定位数据融合方法
1
2014
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
The INS/GNSS/CNS integrated navigation system based on vector information distribution
1
2015
... 合理的冗余设计将大大提高系统的可靠性,但同时也增加了系统的复杂度和设计的难度,如何选择合理而有效的信息融合方法是本文的研究重点.随着联邦卡尔曼滤波理论和容错控制理论的出现,使得以惯性导航系统为基础的惯性/多传感器组合测量技术得到了迅猛发展[7 ] ,相比于集中卡尔曼滤波算法,联邦滤波算法计算量大大的减少,而测量精度并没有明显的损失[8 ] .在轻小型无人机组合测量系统中,采用联邦滤波算法进行信息融合,其主滤波器通常采用固定信息分配系数的方式对各个子系统进行信息分配与重置.而在多源信息融合测量系统中,若其中一个子系统发生故障,对各个子系统的信息分配系数进行动态调节能够减小故障子系统对无故障子系统的污染程度,从而提高子系统的滤波精度,因此为改善故障系统的容错性及滤波精度,信息系数的动态分配成为了融合滤波算法的研究热点[9 ,10 ,11 ] .李兆铭等[12 ] 采用了误差协方差矩阵的Frobenius范数来自适应确定信息分配系数,以达到提高信息融合精度的目的;邓中亮等[13 ] 分析了不同信息分配系数的取值对子滤波器滤波效果的影响,并提出了一种根据精度因子及载噪比来计算信息分配系数的方法;尹露等[14 ] 首先通过估计各子系统的测量噪声,得到子系统可信度并分配置信因子,进而根据置信因子对各子滤波器进行信息分配,以获得最优滤波估计.上述研究都在一定程度上实现了对系统信息的动态分配,比固定的信息分配原则在容错性上有一定的改善,但其都是把所有的状态变量作为一个整体在考虑[15 ] ,并没有把分配系数具体到单一的状态变量,难以兼顾滤波精度和系统容错性. ...
High-speed train running gear fault recognition based on information fusion of multi-source
1
2014
... 本文从滤波精度和容错性2个方面出发,对联邦滤波算法进行了分析,得出能提高组合导航系统容错性及子系统滤波精度的信息分配系数取值原则.鉴于传统联邦滤波结构中的故障隔离模块会将检测到的故障隔离掉[16 ] ,从而造成故障子系统的有用信息丢失的缺点,本文采用了不带故障隔离模块的联邦滤波结构.在此基础上,提出了一种基于信息熵的Pignistic概率转换容错信息分配方法来提高无人机高程融合测量系统的精度及容错性. ...
多源组合导航系统信息融合关键技术研究
1
2018
... Carlson于1988年提出了一种基于分散化滤波思想的联邦滤波理论,该理论描述的联邦滤波结构是由一个公共主系统和若干子系统共同组成,从而构成了组合导航系统.其中各个子系统的量测量分别通过子滤波器中的kalman滤波算法得到局部估计结果,这些结果再由主滤波器进行融合处理,即可得到系统的全局最优估计[17 ,18 ] .有反馈式的联邦滤波结构还需要通过信息分配把全局最优估计和系统噪声分配给各个子滤波器.因此,本文以无人机的惯性导航系统(INS)为主参考系统,结合GPS和气压计实现了多源信息高程测量方案,如图1 所示. ...
多源组合导航系统信息融合关键技术研究
1
2018
... Carlson于1988年提出了一种基于分散化滤波思想的联邦滤波理论,该理论描述的联邦滤波结构是由一个公共主系统和若干子系统共同组成,从而构成了组合导航系统.其中各个子系统的量测量分别通过子滤波器中的kalman滤波算法得到局部估计结果,这些结果再由主滤波器进行融合处理,即可得到系统的全局最优估计[17 ,18 ] .有反馈式的联邦滤波结构还需要通过信息分配把全局最优估计和系统噪声分配给各个子滤波器.因此,本文以无人机的惯性导航系统(INS)为主参考系统,结合GPS和气压计实现了多源信息高程测量方案,如图1 所示. ...
联邦滤波器信息分配原则的探讨
1
2012
... Carlson于1988年提出了一种基于分散化滤波思想的联邦滤波理论,该理论描述的联邦滤波结构是由一个公共主系统和若干子系统共同组成,从而构成了组合导航系统.其中各个子系统的量测量分别通过子滤波器中的kalman滤波算法得到局部估计结果,这些结果再由主滤波器进行融合处理,即可得到系统的全局最优估计[17 ,18 ] .有反馈式的联邦滤波结构还需要通过信息分配把全局最优估计和系统噪声分配给各个子滤波器.因此,本文以无人机的惯性导航系统(INS)为主参考系统,结合GPS和气压计实现了多源信息高程测量方案,如图1 所示. ...
联邦滤波器信息分配原则的探讨
1
2012
... Carlson于1988年提出了一种基于分散化滤波思想的联邦滤波理论,该理论描述的联邦滤波结构是由一个公共主系统和若干子系统共同组成,从而构成了组合导航系统.其中各个子系统的量测量分别通过子滤波器中的kalman滤波算法得到局部估计结果,这些结果再由主滤波器进行融合处理,即可得到系统的全局最优估计[17 ,18 ] .有反馈式的联邦滤波结构还需要通过信息分配把全局最优估计和系统噪声分配给各个子滤波器.因此,本文以无人机的惯性导航系统(INS)为主参考系统,结合GPS和气压计实现了多源信息高程测量方案,如图1 所示. ...
基于模糊故障特征信息的随机集度量信息融合诊断方法
2
2009
... 在实际的量测或实验中,由于受测量环境、场合、地点等因素的影响,测得的实验数据会具有随机误差和故障模糊性,因此可以从实验数据中提取故障特征来构造隶属度函数,从而与模板隶属度函数库做匹配,得出其隶属于各种运行故障的概 率[19 ] .由于无人机组合测量系统的传感器误差可近似为白噪声,其量测值具有高斯分布的形式,因此本文考虑使用正态分布结构来构造隶属度函数. ...
... (1)首先确定模板隶属度函数库:利用实验或仿真手段模拟组合导航中各个子系统的各种故障运行模式.具体做法为在一种故障运行状态模式下的相同时间间隔内连续观测200次量测数据,将其作为一组,并进行5组测量,然后计算出每组测量值的平均值 M k σ k k =1, 2, 3, 4, 5.利用 M k σ k [19 ] (此方法同样用于待检子系统隶属度函数的确定) ...
基于模糊故障特征信息的随机集度量信息融合诊断方法
2
2009
... 在实际的量测或实验中,由于受测量环境、场合、地点等因素的影响,测得的实验数据会具有随机误差和故障模糊性,因此可以从实验数据中提取故障特征来构造隶属度函数,从而与模板隶属度函数库做匹配,得出其隶属于各种运行故障的概 率[19 ] .由于无人机组合测量系统的传感器误差可近似为白噪声,其量测值具有高斯分布的形式,因此本文考虑使用正态分布结构来构造隶属度函数. ...
... (1)首先确定模板隶属度函数库:利用实验或仿真手段模拟组合导航中各个子系统的各种故障运行模式.具体做法为在一种故障运行状态模式下的相同时间间隔内连续观测200次量测数据,将其作为一组,并进行5组测量,然后计算出每组测量值的平均值 M k σ k k =1, 2, 3, 4, 5.利用 M k σ k [19 ] (此方法同样用于待检子系统隶属度函数的确定) ...
A probabilistic transformation of basic probability assignment (BPA) in D-S evidence theory
1
2013
... 综上可知, Pls ( A ) ≥ Bel ( A ) Pls ( A ) - Bel ( A ) 图3 所示.不确定度产生的原因是 Θ [20 ] ,于本文为模糊不清的多可能性故障,如 Θ = { ABC ( AB ) ( AC ) ( BC ) ( ABC ) }
一种基于Pignistic概率距离的合成公式
1
2015
... 由式(18)可知,对于多元素命题的 Bel [21 ] . ...
一种基于Pignistic概率距离的合成公式
1
2015
... 由式(18)可知,对于多元素命题的 Bel [21 ] . ...
Constructing the Pignistic probability function in a context of uncertainty
1
1990
... Pignistic概率转换定义:Smets推导出在多元素命题中每个元素出现的概率是一样的,因此把多元素命题的BPA平均分配给所包含的元素[22 ] : ...
信息熵在导航传感器故障诊断中的应用研究
1
2010
... 信息熵从平均意义上表征了信源整体信息的统计特征,是信源状态不确定性的描述,这使其在故障诊断方面的应用十分广泛[23 ,24 ] .由香农定义的信息熵的计算公式可知,信息熵描述的是信源的平均信息量. ...
信息熵在导航传感器故障诊断中的应用研究
1
2010
... 信息熵从平均意义上表征了信源整体信息的统计特征,是信源状态不确定性的描述,这使其在故障诊断方面的应用十分广泛[23 ,24 ] .由香农定义的信息熵的计算公式可知,信息熵描述的是信源的平均信息量. ...
以光谱信息熵改进的N-FINDR高光谱端元提取算法
1
2015
... 信息熵从平均意义上表征了信源整体信息的统计特征,是信源状态不确定性的描述,这使其在故障诊断方面的应用十分广泛[23 ,24 ] .由香农定义的信息熵的计算公式可知,信息熵描述的是信源的平均信息量. ...
以光谱信息熵改进的N-FINDR高光谱端元提取算法
1
2015
... 信息熵从平均意义上表征了信源整体信息的统计特征,是信源状态不确定性的描述,这使其在故障诊断方面的应用十分广泛[23 ,24 ] .由香农定义的信息熵的计算公式可知,信息熵描述的是信源的平均信息量. ...
 , 李智
, 李智

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}