陶鹏杰 , 宋孟肖, 段延松
, 宋孟肖, 段延松
武汉大学遥感信息工程学院,武汉 430079
TAO Pengjie, SONG Mengxiao, DUAN Yansong
通讯作者:
收稿日期: 2018-09-1
修回日期: 2019-01-11
网络出版日期: 2019-04-24
版权声明: 2019 《地球信息科学学报》编辑部 《地球信息科学学报》编辑部 所有
基金资助:
作者简介:
作者简介:陶鹏杰(1986-),男,湖北武穴人,博士,助理研究员,研究方向为数字摄影测量与遥感。E-mail:pjtao@whu.edu.cn
展开
摘要
LiDAR作为一种主动式获取高精度地表几何信息的地形图测绘技术,其获取的点云具有较高的相对精度与绝对精度,可作为无控或稀少控制条件下(无人机)航空影像高精度几何定位的地理参考数据。影像几何定位所能达到的精度依赖于几何参考数据自身的精度,因此评价LiDAR点云的精度对于将其作为地理参考实现航空影像高精度几何定位,具有较强的理论价值与实践意义。本文提出了利用高精度数字线划图(DLG)作为几何参考评定机载LiDAR点云精度的方法。首先,通过比对DLG中高程注记点的高程与LiDAR点云中对应位置处的高程,实现LiDAR点云高程精度评定;然后,通过统计LiDAR墙面点在平面上的投影点到DLG房屋矢量轮廓线的距离,实现LiDAR点云平面精度评定。实验结果证明,本文试验区域LiDAR点云平面和高程精度分别可达到7.2 cm和8.3 cm,可作为大比例尺无人机航空遥感控制数据的有效选择。
关键词:
Abstract
LiDAR is an active topographic mapping technique for obtaining high precision surface geometric information. In recent years, LiDAR point cloud has been widely used and gradually become a new standard geospatial information product, because of its efficiency, directness and easy availability. Due to its high accuracy, LiDAR point cloud data can be used as georeference data for aerial triangulation of unmanned aerial vehicle (UAV) imagery with sparse ground control points (GCPs) or even without GCP. Because the accuracy of aerial triangulation strongly depends on the accuracy of georeference data itself, so it is of great practical significance to evaluate the accuracy of LiDAR point cloud as georeference data. In this study, we proposed a method for evaluating the accuracy of airborne LiDAR point cloud data using high precision digital line graphic (DLG) as reference data. This method realizes not only the assessment of the vertical accuracy of LiDAR point cloud, but also the reliable assessment of the horizontal accuracy of LiDAR point cloud. Firstly, the vertical accuracy was evaluated by comparing the elevations of the elevation points in DLG with the elevations of the LiDAR points at corresponding positions. Secondly, the facade points of LiDAR buildings were extracted and projected into a horizontal plane, and their distances from the outlines of buildings in DLG were calculated to evaluate the horizontal accuracy of LiDAR point cloud. Due to the existence of a large number of elevation points and building contours in the DLG, the accuracy assessment samples were abundant, and the assessment results could reflect the true accuracy level of LiDAR point cloud. The experiments showed that the horizontal and vertical accuracy of LiDAR point cloud in the test area could reach 7.2 cm and 8.3 cm, respectively, which proved that LiDAR can be used as an effective control data for large scale UAV aerial remote sensing purpose.
Keywords:
信息化与智能化是信息时代摄影测量的基本特点[1],影像数据获取的便捷性与处理的高效性,大幅提高了地理信息感知的能力。尤其是无人机已成为普适化和平民化的科学手段,无人机遥感大数据如山洪爆发般不断涌现[2]。当前城市化进程中,人们对城市精细三维地理信息感知的需求不断加强。作为三维地理信息提取的重要手段,传统摄影测量技术仍依赖于高精度外业控制点,即使利用定位定姿系统(POS)观测数据辅助处理,仍然无法摆脱对控制点的依赖。然而,外业控制点采集周期长,已成为制约摄影测量影像处理效率和全自动化的瓶颈,限制了摄影测量智能化的发展。因此,研究控制信息自动获取技术是摄影测量发展的重要需求。
利用已有地理空间信息(DOM、DEM/DSM、DLG)数据作为几何参考替代外业控制点实现“云控制”摄影测量[3],是自动获取控制信息的有效方法。基于已有地理空间信息的中小比例尺“云控制”理论与方法已经成熟,并成功应用于高分辨率卫星影像在轨几何标定[4]、中小比例尺影像空中三角测量[5]和正射影像更新[6]等方面。然而,由于高精度参考数据的缺乏和理论的局限性,现有方法难以适应大比例尺(1:500至1:5000)地形图精度要求。
LiDAR作为近10年来主流地形图测绘中引入的最有意义的技术之一,它的主要优点是为三维数据的采集提供了一种直接的方法,而且由于其集成了POS辅助精确定位的传感器平台和高精度激光测距仪器,因此具有很高的精度[7]。LiDAR点云优良的几何精度能够满足大比例尺摄影测量对控制数据的要求,可作为高精度几何控制信息。LiDAR系统集成高精度GNSS/IMU设备,所获取点云绝对精度高;大范围内LiDAR点云经过处理后,相对精度一致,不存在条带间拼接错位问题。相对于外业控制点,LiDAR点云密度高、分布均匀的优势有利于提高区域网平差的精度和可靠性。
近年来,LiDAR点云获取方式的高效性、直接性与便捷性,促使其被广泛使用,并已经逐渐成为新型标准地理空间信息产品。国际上,加拿大、英国、美国等发达国家已经建立或者正在计划建立国家LiDAR数据集(表1);在国内,江苏和广东等省份也获取了覆盖全省或部分地区的LiDAR点云。它们给LiDAR数据“云控制”提供了数据基础。基于此,可进行基于LiDAR点云的航空影像摄影测量技术,充分利用LiDAR点云作为控制信息,实现无控或稀少控制条件下的大比例尺航空摄影测量。
表1 建设National LiDAR dataset的国家及其建设情况[
Tab. 1 Countries with national LiDAR datasets either completed or in progress
| 编号 | 国家 | 数据集建设状态 | 点云密度/(pts/m2) |
|---|---|---|---|
| 1 | 加拿大 | 蒙特利尔已完成,2015年 | 10 |
| 2 | 丹麦 | 完成,2008年,2013年 | 4 |
| 3 | 芬兰 | 完成 | 0.5 |
| 4 | 拉脱维亚 | 正在建设,2013-2018年 | 4 |
| 5 | 荷兰 | 完成,2003年 | 1/25-1/16 (AHN1), 6-10 (AHN2) |
| 6 | 芬兰 | 正在建设 | 4~12 |
| 7 | 斯洛文尼亚 | 完成,2015年 | 5 |
| 8 | 西班牙 | 正在建设 | 0.5 |
| 9 | 瑞典 | 正在建设 | 0.5 |
| 10 | 瑞士 | 完成 | 1 |
| 11 | 美国 | 在讨论中 | |
| 12 | 英国 | 正在建设 | 0.5、1.0、4.0、16.0 |
| 13 | 新西兰 | 在讨论中 |
航空影像摄影测量几何定位所能达到的精度依赖于控制数据自身的精度。利用LiDAR点云作为高精度几何参考,需先评定其精度。LiDAR点云的误差可分为相对误差和绝对误差,相对误差是不同LiDAR条带的误差,消除条带误差可通过条带平差的方式实现[9,10,11]。而LiDAR点云的绝对误差难以消除,需从LiDAR工作机理和实际数据检测2个方面检测其精度。现有研究使用地面控制点、正射影像和特制的地面靶标等检查LiDAR点云精度,存在成本高、难以大范围检测或不能客观反映LiDAR真实精度等问题。本研究利用高精度DLG评价LiDAR点云精度的方法,充分利用已有DLG数据作为几何参考,成本低、参考数据样本量大,同时可检测LiDAR点云真实的平面和高程精度,相对现有方法更具优势。
LiDAR点云精度评价主要包括理论精度分析和实际精度检测2个方面。在理论分析方面,Csanyi和Toth[12]综合考虑机载LiDAR系统主要的潜在误差源,包括导航系统误差、视准轴校正误差、激光测距误差、扫描角度误差和激光束发散等因素,根据严格误差传播定律推导了误差公式,从而获取可靠的LiDAR理论精度;Schaer等[13]总结了决定LiDAR定位精度的3个主要因素,即激光束的直接定位误差、激光本身的测量误差和扫描几何因素变化对测距仪误差的影响,并进行了类似的理论精度分析工作。
LiDAR点云数据的实际精度检测则主要通过与高精度的几何参考(如地面控制点)进行对比实现。主要包括以下几类:
(1)基于地面控制点的精度评定。这类方法主要通过比较控制点高程和对应位置处LiDAR点云高程实现高程精度的评定[14,15,16,17,18,19],控制点对应位置处LiDAR点云高程通过局部拟合或者从点云生成的DSM中内插得到。然而,由于控制点在LiDAR点云中的准确平面位置难以确定,这类方法不适于LiDAR点云的平面精度评定。
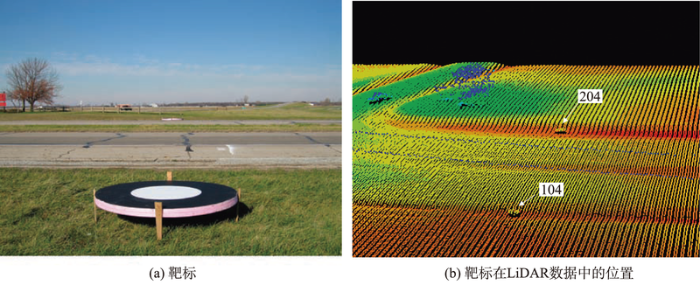
(2)基于地面靶标的精度评定。为了解决地面控制点难以评定LiDAR平面精度问题,Csanyi和Toth[20]设计了一种具有高反射强度的圆形靶标,预先布设于观测区域并用LiDAR点云来拟合靶标中心坐标,将拟合坐标与实际外业量测的靶标中心坐标进行对比来评价LiDAR点云精度(图1(a))。由于靶标在LiDAR点云中可明显量测到(图1(b)),故可用于评定LiDAR点云的平面精度。基于类似思想,马洪超等[21]和邢吉昌等[22]也分别设计了十字形靶标和角锥形靶标检测LiDAR点云的平面精度。这种方法的缺陷在于:① 当LiDAR点云密度较低时,靶标需要制作的非常庞大才能获取足够的点云来拟合靶标中心;② 由于点云具有一定的扫描间隔,通过点云拟合出的靶标中心坐标精度有限;③ 靶标需要预先制作好且布设在试验区,成本高且较不方便。因此,基于地面靶标的LiDAR点云精度评价方法有诸多的限制条件。
图1 基于圆形靶标的LiDAR点云精度评价[
Fig. 1 Accuracy evaluation of LiDAR point cloud based on circular target
(3)基于正射影像的精度评定。Ray和Graham[23]提出分别从正射影像和LiDAR点云强度图像中提取出特征线,并通过对比2种特征来评价LiDAR点云的平面精度。该方法借助已有的地理信息数据,可免除人工布设和测量外业控制点,但是LiDAR点云扫描间隔较大(当LiDAR点云密集为10 pts/m2时,对应的扫描间隔约为32 cm,然而一般而言机载LiDAR点云密度难以达到10 pts/m2),从中提取的特征线精度有限;另外正射影像本身精度也有限,因此该方法评定的平面精度难以反映LiDAR点云的真实精度水平,不适于高精度LiDAR点云的精度评定。
以上3种方法中,基于地面靶标的精度评定方法可准确量测靶标在LiDAR点云中的位置,最可靠,但成本较高且不便于实际操作,尤其是难以应用于大面积LiDAR点云数据精度评定;基于地面控制点和正射影像的方法,由于无法精确确定参考数据与LiDAR点云的平面对应关系,都难以精确评定LiDAR点云的平面精度。
本文采用具有较高精度的城市区域大比例尺DLG作为几何参考评价LiDAR点云精度,选择大比例尺DLG作为几何参考的原因有以下几点: ① 大比例尺DLG(1:500,1:1000)作为是测绘勘测和城市规划相关单位的存档数据,是城市区域常见的基础地理信息数据,便于应用,不需额外进行专门的外业测量工作;② 许多地区的大比例尺DLG具有较高的精度,平面和高程精度均高于LiDAR点云;③ DLG上有大量的参考点线面,可以在大范围重复验证LiDAR点云的精度,这种基于统计结果的精度评价更具可靠性。
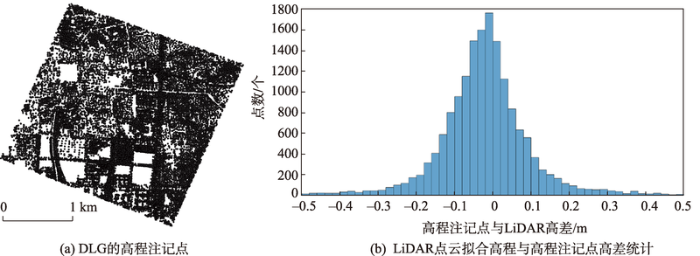
一般而言,城区中的道路在局部范围内都较为平坦,因此可以认为道路上的局部点云拟合得到的平面的高程代表了LiDAR量测的高程值,该高程值和DLG对应区域内的高程注记点高程的差值可以反映LiDAR点云的精度情况。虽然从单点来看,拟合得到的高程值具有不确定性,但是DLG中记录的大量高程注记点可以对LiDAR点云的高程精度进行重复验证,因此这种基于统计的结果比传统的通过少量靶标点检验精度的方式更加可靠。
如图2所示,利用局部点云可以拟合平面,根据拟合平面的高程和高程注记点的高差可以估计 LiDAR点云的高程精度。
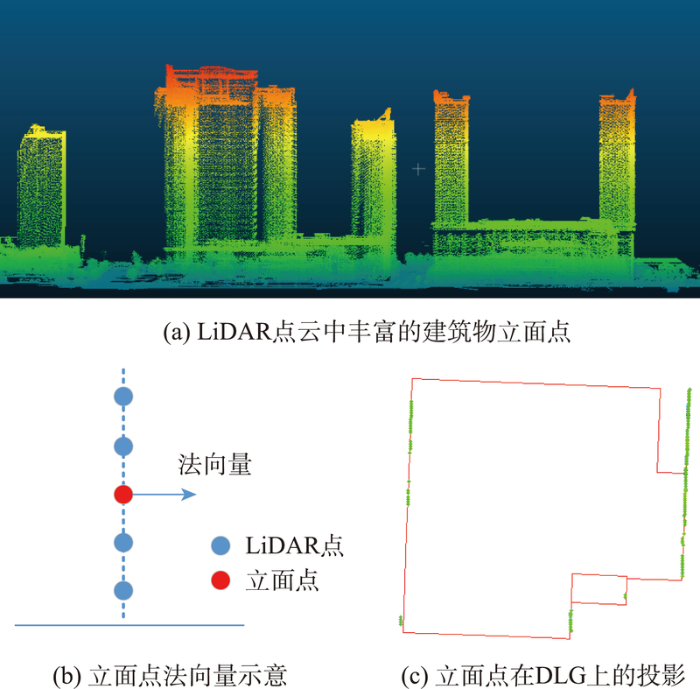
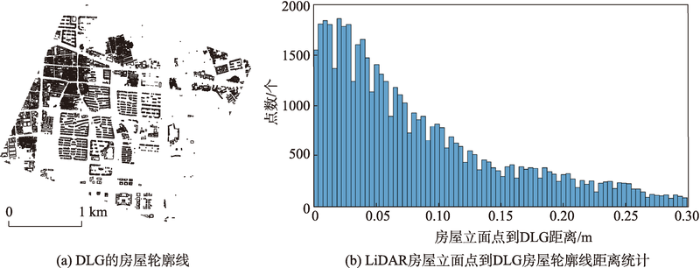
相对于高程精度评价,点云的平面精度评价更困难,主要由于LiDAR是通过离散扫描的方式来获取数据,该方式很容易略过建筑物边缘等明显地物特征。因此,从LiDAR点云中提取的特征和实际特征往往具有偏差,偏差大小取决于LiDAR点云的平面分辨率。为解决该问题,本文利用DLG中的房屋轮廓线来评价LiDAR点云的平面精度。与之前方法不同的是,本文以LiDAR点云的立面点(图3(a))为基准,而并非采用落在建筑物边缘附近的点,这样避免了离散扫描所带来的点间隔误差。
图3 利用建筑物立面点到DLG的平面距离评价LiDAR点云平面精度
Fig. 3 Using horizontal distances from façade points to DLG to evaluate the horizontal accuracy of LiDAR point cloud
平面精度评定的关键在于从LiDAR点云中提取房屋立面特征点。该过程通过计算点云法向量实现,首先采用规则格网和KD树混合的方式建立LiDAR点云索引[24],然后对于LiDAR点云中第i个离散点Pi(i=1, 2, …, N, N为LiDAR点云的离散点数量),基于该索引检索其最邻近的k个点,利用这些最邻近点进行最小二乘平差拟合局部平面
(1)房屋立面点法向量应与地面近似平行(图3(b)),即法向量与地平面夹角
(2)房屋立面点到拟合平面的距离d较小(房屋立面点应近似位于一个平面上,而噪声点则是各方向散乱分布)。
本文中k=32限制法向量与地平面的夹角
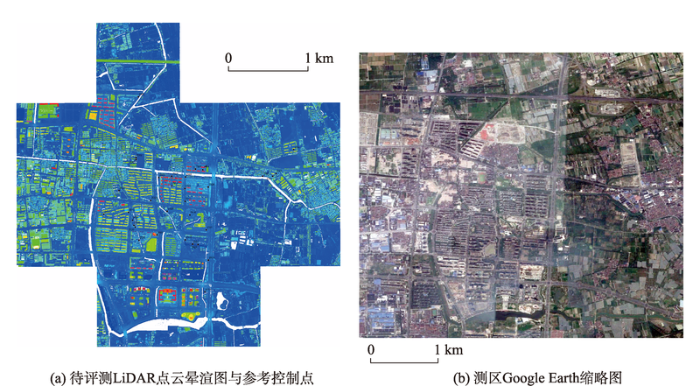
实验区域为浙江省宁波市区,该区域地处宁波平原,属于平原地貌,海拔在0~15 m左右。采用宁波地区1:500比例尺的高精度DLG作为参考,DLG属于为归档成果数据,通过全外业测量获取,DLG的平面精度优于5 cm,高程注记点的精度优于 3 cm。待评定的LiDAR点云通过机载LiDAR扫描设备获取,获取时的航高约为1000 m,其密度约为10 pts/m2,点云中最高建筑物高度约为150 m。测图概况如图4所示,图4(a)为待评测LiDAR点云晕渲图,其中红色表示高程较大区域,蓝色表示高程较小区域,为了与基于地面控制点的精度评定方法比较,通过外业测制了34个控制点(图中黑色圆点);图4(b)为测区在Google Earth上的略图,从图中可知,测区房屋较为密集,对应LiDAR点云则存在较多房屋立面,有利于评测点云平面精度。
图4 宁波测区LiDAR点云、控制点和建筑物分布概况
Fig. 4 Overview of LiDAR point cloud and distributions of control points and buildings in Ningbo test area
本文点云精度评价结果如图5-图6所示。在高程精度评定中,共有高程注记点16 448个,平均高差(1
以图4(a)所示的34个地面控制点作为参考数据,采用上文所述基于地面控制点的方法进行LiDAR点云精度评价。由于控制点在LiDAR上平面位置无法精确确定,仅能评价高程精度。34个点与LiDAR点云高差中误差为13.2 cm,绝对值最小值为0.2 cm,最大值为35.6 cm。本文方法与基于地面控制点评价结果对比情况如表2所示。由表可知,本文基于DLG的方法相对基于地面控制点的方法的优势表现在2个方面:① 可精确评定LiDAR点云的平面精度;② 地面控制点数量相对于DLG的高程注记点而言,数量十分有限,精度统计样本不足,易受到精度较低点的影响,基于地面控制点评测的LiDAR点云高程不够客观。本文基于DLG的评测方法不仅可精确评定LiDAR点云的平面精度,结果还可反映LiDAR点云真实精度。
表2 本文方法与地面控制点方法的LiDAR点云精度评价结果对比
Tab. 2 Comparison of accuracy assessment results of LiDAR based on this method and ground control point method
| 方法 | 点数 | LiDAR高程误差/cm | LiDAR平面误差/cm | |||||
|---|---|---|---|---|---|---|---|---|
| 中误差 | 最小值 | 最大值 | 中误差 | 最小值 | 最大值 | |||
| 本文基于DLG的方法 | 3030 | 8.3 | 0.1 | 48.5 | 7.2 | 0.3 | 29.8 | |
| 基于地面控制点的方法 | 34 | 13.2 | 0.2 | 35.6 | n/a | n/a | n/a | |
本文提出了利用高精度DLG作为几何参考,进行机载LiDAR点云精度评定的方法。不仅实现LiDAR点云高程精度的精确评定,还实现了LiDAR点云平面精度的可靠评定。
(1)通过比对DLG中高程注记点与对应位置LiDAR点云高程可实现LiDAR点云高程精度评定。
(2)建筑物立面在LiDAR点云中可精确提取且具有明确的坐标值,其在平面上投影所形成的轮廓即为测值DLG时的建筑物位置,因此通过提取LiDAR点云立面点且统计其到DLG房屋轮廓线的距离可实现LiDAR点云平面精度的可靠评定。
(3)DLG中存在大量的高程注记点和房屋轮廓线,相对于基于地面控制点的LiDAR点云精度评定方法而言,本文基于DLG的方法所使用的精度统计样本相对丰富,评测结果更能客观地反映LiDAR点云真实精度水平,因此本文方法更具优势。
实验表明,宁波试验区LiDAR点云平面和高程精度可分别达到7.2 cm和8.3 cm。目前无人机遥感影像已愈来愈多地应用于测绘生产,因此LiDAR点云可作为大比例尺无人机航空遥感控制数据的有效选择。
The authors have declared that no competing interests exist.
| [1] |
摄影测量的信息化与智能化 [J].Informatization and intellectualization of photogrammetry [J]. |
| [2] |
无人机遥感众创时代 [J].The mass innovation era of UAV remote sensing [J]. |
| [3] |
谈大数据时代的“云控制”摄影测量 [J].https://doi.org/10.11947/j.AGCS.2017.20170337 URL [本文引用: 1] 摘要
在当今大数据时代,影像数据采集方式的多样化、高效化、便捷化产生的摄影测量影像大数据需要高效、自动与智能的处理。然而,作为传统摄影测量几何定位主要控制数据的外业控制点,其获取的复杂性与低效性仍然是制约摄影测量处理效率的关键因素。针对该问题,本文提出了“云控制”摄影测量的概念,以带有地理空间信息的数据作为几何控制替代外业控制点,通过自动匹配(或配准)获取大量密集的控制信息;并介绍了基于影像、矢量和LiDAR点云的3种“云控制”摄影测量技术;最后对“云控制”摄影测量的应用前景进行了展望并对其问题进行了讨论。
An overview on "cloud control" photogrammetry in big data era [J].https://doi.org/10.11947/j.AGCS.2017.20170337 URL [本文引用: 1] 摘要
在当今大数据时代,影像数据采集方式的多样化、高效化、便捷化产生的摄影测量影像大数据需要高效、自动与智能的处理。然而,作为传统摄影测量几何定位主要控制数据的外业控制点,其获取的复杂性与低效性仍然是制约摄影测量处理效率的关键因素。针对该问题,本文提出了“云控制”摄影测量的概念,以带有地理空间信息的数据作为几何控制替代外业控制点,通过自动匹配(或配准)获取大量密集的控制信息;并介绍了基于影像、矢量和LiDAR点云的3种“云控制”摄影测量技术;最后对“云控制”摄影测量的应用前景进行了展望并对其问题进行了讨论。
|
| [4] |
On-orbit geometric calibration of the panchromatic/multispectral camera of the ZY-1 02C satellite based on public geographic data [J]. |
| [5] |
Automatic UAV image geo-registration by matching UAV images to georeferenced image data [J].https://doi.org/10.3390/rs9040376 URL [本文引用: 1] 摘要
Recent years have witnessed the fast development of UAVs (unmanned aerial vehicles). As an alternative to traditional image acquisition methods, UAVs bridge the gap between terrestrial and airborne photogrammetry and enable flexible acquisition of high resolution images. However, the georeferencing accuracy of UAVs is still limited by the low-performance on-board GNSS and INS. This paper investigates automatic geo-registration of an individual UAV image or UAV image blocks by matching the UAV image(s) with a previously taken georeferenced image, such as an individual aerial or satellite image with a height map attached or an aerial orthophoto with a DSM (digital surface model) attached. As the biggest challenge for matching UAV and aerial images is in the large differences in scale and rotation, we propose a novel feature matching method for nadir or slightly tilted images. The method is comprised of a dense feature detection scheme, a one-to-many matching strategy and a global geometric verification scheme. The proposed method is able to find thousands of valid matches in cases where SIFT and ASIFT fail. Those matches can be used to geo-register the whole UAV image block towards the reference image data. When the reference images offer high georeferencing accuracy, the UAV images can also be geolocalized in a global coordinate system. A series of experiments involving different scenarios was conducted to validate the proposed method. The results demonstrate that our approach achieves not only decimeter-level registration accuracy, but also comparable global accuracy as the reference images.
|
| [6] |
Registration of CBERS-02B satellite imagery in quick GIS updating [C]. |
| [7] |
|
| [8] |
|
| [9] |
LiDAR strip adjustment using multifeatures matched with aerial images [J]. |
| [10] |
Airborne LiDAR strip adjustment based on LSM [C]. |
| [11] |
Airborne LiDAR data strip adjustment based on least squares matching and independent model [C]. |
| [12] |
Point positioning accuracy of airborne LiDAR systems: A rigorous analysis [C]. |
| [13] |
Accuracy estimation for laser point cloud including scanning geometry [C]. |
| [14] |
山区LiDAR高程精度野外检验的一种新方法 [J].
机载激光雷达因其独有的优势在国外诸多领域得到了广泛应用,而在我国刚刚起步,其点云高程的实际精度是值得研究的问题。常规的野外检验方法,即将LiDAR采集的点云坐标与野外实测值相比较,有时在山区不适合。针对山区地形提出一套新的检验方法,并通过与常规的野外方法对比,得出一些有意义的结论。
A new method for field LiDAR elevation precision testing in mountainous areas [J].
机载激光雷达因其独有的优势在国外诸多领域得到了广泛应用,而在我国刚刚起步,其点云高程的实际精度是值得研究的问题。常规的野外检验方法,即将LiDAR采集的点云坐标与野外实测值相比较,有时在山区不适合。针对山区地形提出一套新的检验方法,并通过与常规的野外方法对比,得出一些有意义的结论。
|
| [15] |
机载LIDAR点云高程数据精度检核及误差来源分析 [J].Accuracy check and analysis of LiDAR elevation data [J]. |
| [16] |
Vertical accuracy validation of LiDAR data [J]. |
| [17] |
Vertical accuracy assessment of LiDAR ground points using minimum distance approach [C]. |
| [18] |
Accuracy of a high-resolution LiDAR terrain model under a conifer forest canopy [J].Canadian [J]. |
| [19] |
Accuracy of airborne LiDAR-derived elevation: Empirical assessment and Error Budget [J]. |
| [20] |
Improvement of Lidar data accuracy using Lidar-specific ground targets [J]. |
| [21] |
一种检查机载LiDAR平面精度的新方法 [J].A new method for airborne LiDAR plane precision evaluation . |
| [22] |
国产机载LiDAR平面精度检查新方法 [J].A new method for domestic airborne LiDAR plane precision evaluation [J].Journal of Zhe [J]. |
| [23] |
New horizontal accuracy assessment tools and techniques for LiDAR data [C]. |
| [24] |
LiDAR点云辅助的城区航空影像空中三角测量 [D].LiDAR point cloud assisted aerotriangulation of urban airborne image [D]. |

/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}